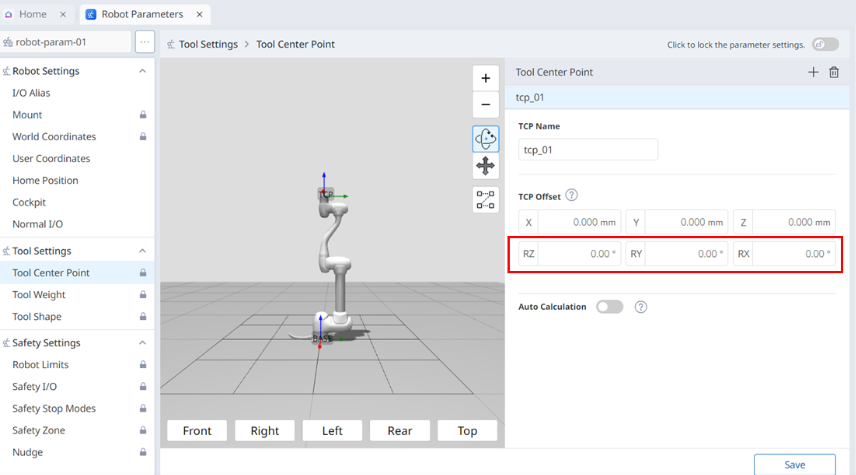
ツールの中心点
工具中心点(TCP)を構成する場合は、フランジ座標に基づく位置と回転角度も定義する必要がある。 IME、フランジ座標のデフォルト始点からX、Y、Z方向のツール中心点(TCP)までの距離は10000 mmを超えるように設定できない。また、強制制御、コンプライアンス制御、および直接ティーチングポイント固定は、変換された長さX、Y、Z( ![]()
自動計算を使用して工具中心点(TCP)を設定した場合は、X、Y、Z位置のみに基づいて計算が行われるため、回転角度を入力する必要がある。回転角度はRZ、RY、RXで定義でき、「オイラーZ-Y-Z」回転法に基づいて定義できる。
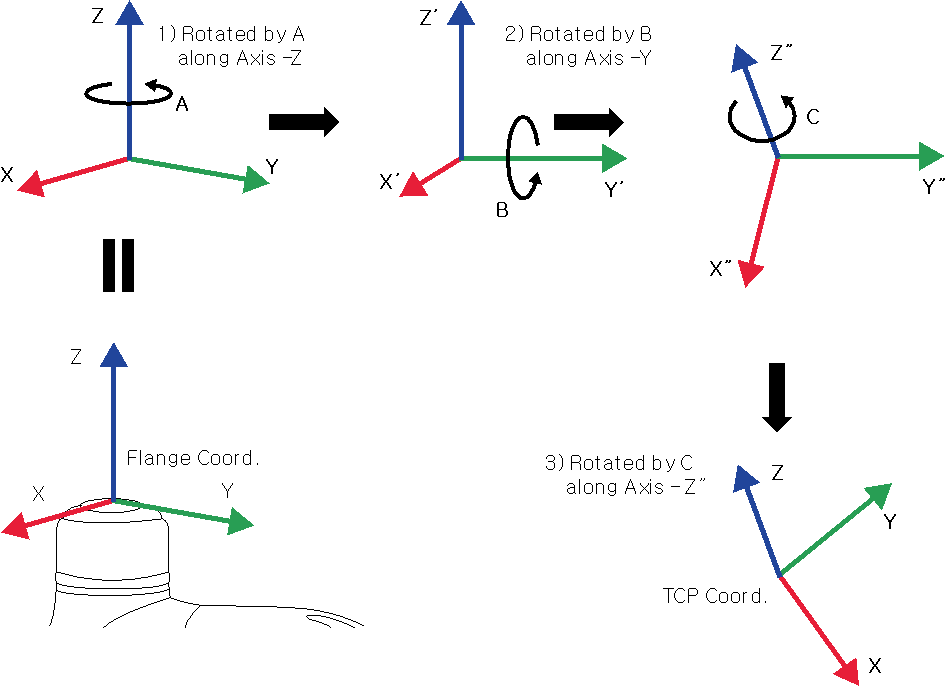
x,y,zで表される座標軸とX,Y,Zで表される座標軸の定義は以下の通りである。
-
「フランジ座標」(x、y、z)の座標軸:ロボットのロボットジョイント角度が(0,0,0,0,0,0)の場合、フランジの端に定義される「フランジ座標」の座標軸方向はロボット座標と同一である。
-
「TCP座標」の座標軸(X、Y、Z):これは、フランジの端に取り付けられた工具の端または作業点に設定される。このとき、「TCP座標」の回転角度は、以下の「フランジ座標」の1)~3)の順序で定義される。
-
フランジ座標のZ軸に沿って1度回転する。
-
1に従って回転した座標のy '軸に沿ってB度回転する)。
-
2に従って回転した座標のz’軸に沿ってC度回転する)。
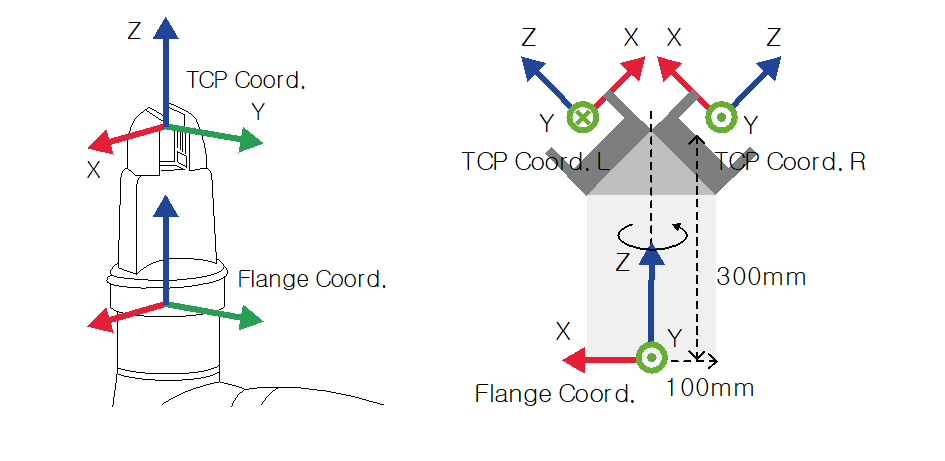
上記の方法に従ってTCPを設定する例をいくつか示す。
-
[X、Y、Z、Rz、Ry、 Rx]=[0、0、100、0、0、 0]:Z方向オフセットのみを使用した一般グリッパー(TCP Coord)
-
[X、Y、Z、Rz、Ry、 Rx]=[100、0、300、180、-45、 0]:45度の角度を持つ左グリッパー(TCP Coord)。L)
-
[X、Y、Z、Rz、Ry、 Rx]=[-100、0、300、0、-45、 0]:45度の角度を持つ右グリッパー(TCP Coord)。R)
Unknown Attachment
メニュー
|
項目s |
概要 |
|
|---|---|---|
|
1 |
ロックトグルボタン |
設定値をロックするために使用する。設定値を変更するには、安全パスワードが必要である。 |
|
2 |
3Dシミュレーション |
ここで、コンフィグレーションされた工具中心点をシミュレートできる。 |
|
3 |
追加する |
このボタンを使用すると、TCPを追加できる。 |
|
4 |
削除中 |
このボタンを使用すると、選択したTCPを削除できる。 |
|
5 |
保存 |
このボタンを使用すると、設定値を保存することができる。 |
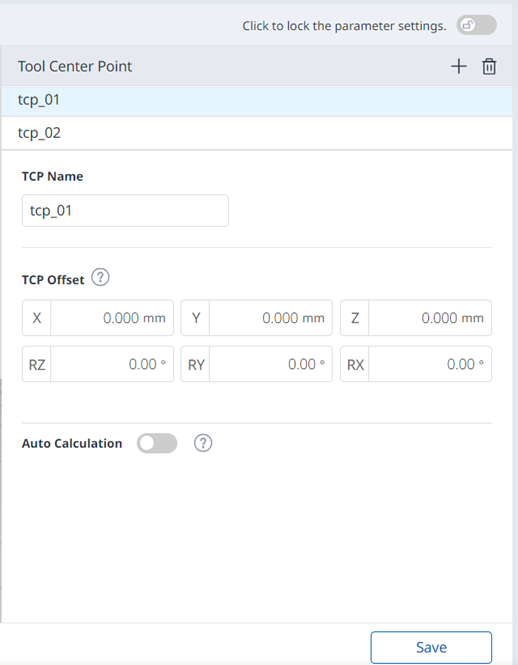
設定がロックされると、以下の画面が表示される。
Unknown Attachment
このとき、選択されたTCPは次のように青で表示される。
ツール重量
フランジに取り付けられた工具の重量は、工具重量(Tool Weight)を追加して設定できる。工具重量は、[ ロボットパラメータ(Robot Parameters)]>[工具設定(Tool Settings)]>[工具重量(Tool Weight)]を選択して設定できる
-
工具重量は自動測定機能を使用して測定できる。
-
ワークピースを持つ各工具に工具重量を追加することが推奨される。ワークの重量が重すぎると、ロボットはワークの重量を外力として認識する可能性がある。ロボットがこの外力を衝突と判断して停止するからである。
-
タスクを作成する際には、工具重量を変更するプロセスに応じて重量を変更する。例えば、ワークをピックアップする前に標準ツール重量を選択し、ワークをピックアップした後にワークでツール重量を選択するようにタスクを設定することができる。
アクティブ化されたツールウェイトアイテムは、 ![]()
-
ツール設定のセットが他のコマンドのセットと同じである。 タスクの実行中に工具重量を変更するときに、設定コマンドを使用できる。詳しくは、 タスクエディターモジュールを参照のこと。 .
注釈
-
最大50種類のツールウェイトを登録できる。
-
Mシリーズの場合、最大工具重量が最大工具重量を超えたときに自動的に加速度を調整する機能。
Unknown Attachment
Unknown Attachment
メニュー
|
項目s |
概要 |
|
|---|---|---|
|
1 |
ロックトグルボタン |
設定値をロックするために使用する。設定値を変更するには、安全パスワードが必要である。 |
|
2 |
追加する |
このボタンを使用すると、新しい工具重量を追加できる。 |
|
3 |
削除中 |
このボタンを使用すると、工具重量を削除できる。 |
|
4 |
工具重量リスト |
設定されているツールウェイトのリスト。 |
|
5 |
工具重量名 |
ここで、工具重量の名前を入力できる。 |
|
6 |
モーションを自動測定 |
このボタンを使用すると、自動測定を実行できる。 |
|
7 |
自動測定 |
このボタンを使用すると、オプションを選択して自動測定を実行できる。 |
|
8 |
モーションの選択 |
必要な動作をオプションから選択できる。 |
|
9 |
重量の使用の選択 |
重量を使用するかどうかを選択できる。 この選択ボックスは、EシリーズまたはFPTセンサーなしのAシリーズでは無効になっている。 |
|
10 |
重量入力 |
これはあなたが所望の重量を入力することができるところである。 |
|
11 |
重心CXの使用の選択 |
重心CXの使用を選択できる。 |
|
12 |
CX入力 |
CXを入力できる。 |
|
13 |
重心CYの使用の選択 |
重心CYの使用を選択することができる。 |
|
14 |
CY入力 |
CYを入力できる。 |
|
15 |
重心CZの使用の選択 |
重心CZの使用を選択できる。 |
|
16 |
CZ入力 |
CZを入力できる。 |
|
17 |
慣性を使用するかどうか |
このチェックボックスを使用すると、慣性を使用するかどうかを選択できる。 |
|
18 |
lxx入力 |
慣性のためのlxxエントリを入力できる。 |
|
19 |
lyy入力 |
慣性のためのlyyエントリを入力することができる。 |
|
20 |
lzz入力 |
慣性のlzzエントリを入力できる。 |
|
21 |
LXY入力 |
慣性のLXYエントリを入力できる。 |
|
22 |
LYZ入力 |
慣性のためのlyzエントリを入力することができる。 |
|
23 |
lzx入力 |
慣性のためのlzxエントリを入力できる。 |
|
24 |
保存 |
設定値を保存することができる。 |
ツール形状
フランジに取り付けられた工具の形状は、工具形状を追加することで設定できる。
工具形状は、 ロボットパラメーターモジュール>工具設定>工具形状で設定できる。詳しくは、『 工具形状』を参照。.
-
ロボットは、ロボット端部とロボットボディーのTCP(工具中心点)に基づいてスペース制限違反状況を決定する。実際のロボットの工具形状が設定されたTCPよりも大きい場合は、工具形状を追加してワークピースと工具を保護する必要がある。
-
工具形状が大きすぎるとロボットが操作できるゾーンが減少するので注意すること。
ツール形状項目は登録(確認)され、トグルスイッチが有効になった後にのみ利用可能となる。アクティブ化されたツール形状アイテムは、 ![]()
-
ツール設定のセットが他のコマンドのセットと同じである。 タスクの実行中に工具形状を変更する場合に、[設定(Set)]コマンドを使用できる。詳しくは、 タスクエディターモジュールを参照のこと。.
注釈
最大50種類の工具形状を登録可能。
Unknown Attachment
メニュー
|
項目s |
概要 |
|
|---|---|---|
|
1 |
ロックトグルボタン |
設定値をロックするために使用する。設定値を変更するには、安全パスワードが必要である。 |
|
2 |
3Dシミュレーション |
ここで、コンフィグレーションされた工具シェイプの結果を3Dシミュレートできる。 |
|
3 |
ツール形状名 |
構成済みツールの名前。 |
|
4 |
ツール形状フォーム |
構成済みツールの形状。 |
|
5 |
ツール形状を編集する |
このボタンを使用すると、コンフィグレーションされた工具形状を編集できる。 |
|
6 |
ツール形状を削除する |
このボタンを使用すると、選択した工具形状を削除できる。 |
|
7 |
ツール形状を追加する |
工具形状を追加できる。 |
|
8 |
適用 |
このボタンを使用すると、設定後に工具形状を適用できる。 |
Unknown Attachment
メニュー
|
項目s |
概要 |
|
|---|---|---|
|
1 |
ツール形状 |
このペインがツールシェイプポップアップであることを示す。 |
|
2 |
名前を入力する |
工具形状の名前を入力できるフィールド。 |
|
3 |
注意メッセージ |
セットアップ時の注意事項 |
|
4 |
新しい立方体を追加 |
このボタンを使用すると、立方体を追加できる。 |
|
5 |
新しい球を追加 |
このボタンを使用すると、球を追加できる。 |
|
6 |
新しいカプセルを追加 |
このボタンを使用すると、カプセルを追加することができる。 |
|
7 |
キャンセル |
このボタンを使用すると、設定をキャンセルすることができる。 |
|
8 |
確認 |
このボタンを使用すると、設定を確認することができる。 |
立方体/球/カプセルが追加されると、表示は次のようになる。
|
Unknown Attachment |
Unknown Attachment |
|
Unknown Attachment |
|