各ロボットシリーズの機能制限
異なるロボットシリーズ(A、AS、E、M/H、Pシリーズ)では、機能の使用が次のように制限されている。
-
現行ベース:各ジョイントに配置されたモータの電流が使用される。
-
FTSベース:ロボットの端部にあるFTS(フォーストルクセンサー)を使用する。
-
JTSベース:各ジョイントに配置されたJTS(ジョイントトルクセンサ)が使用される。
|
特徴 |
A/Eシリーズ(電流ベース) |
AシリーズS(電流、FTSベース) |
Mシリーズ(JTSベース) |
Hシリーズ(JTSベース) |
Pシリーズ(JTSベース) |
|---|---|---|---|---|---|
|
直接指導
|
O |
O(電流ベース) |
O |
O |
O |
|
直接指導
|
X |
O(FTSベース) |
O |
O |
O |
|
衝突検出 |
O |
O(電流ベース) |
O |
O |
O |
|
設置姿勢測定 |
X |
O(FTSベース) |
O |
X(ロボットは床にのみ設置可能) |
X(ロボットは床にのみ設置可能) |
|
ツール重量測定 |
X |
O(FTSベース) |
O |
O |
O |
|
部材重量測定 |
X |
O(FTSベース) |
O |
O |
O |
|
ナッジ機能 |
X |
X |
O |
O |
O |
|
フォースコントロール |
O (回転を除く3つの平行移動方向でのみ設定可能) |
O(FTSベース) |
O |
O |
O |
|
コンプライアンス管理 |
O (回転を除く3つの平行移動方向でのみ設定可能) |
O(FTSベース) |
O |
O |
O |
ロボットシリーズごとの力監視の機能制限
ティーチペンダントとDART-Studioは力データの監視に使用できる。DRLコマンド(check_force_condition ())は力のデータを外部から監視するためにも使用できる。
-
パレタイジングモードが「ON」に設定されている場合:H、Pシリーズロボットを除き、OFF状態で提供される制御/監視機能を使用可能。
|
特徴 |
A/Eシリーズ(電流ベース) |
AシリーズS(電流ベースおよびFTSベース) |
Mシリーズ(JTSベース) |
Hシリーズ(JTSベース) |
Pシリーズ(JTSベース) |
|---|---|---|---|---|---|
|
強制制御 |
O(回転を除く3つの平行移動方向でのみ設定可能) |
O(FTSベース) |
O |
O |
O |
|
O (パレタイジングモードが「ON」に設定されている場合: 強制制御出力制限(Base Rx、Ry方向) 1) |
O (パレタイジングモードが「ON」に設定されている場合: 強制制御出力制限(Base Rx、Ry方向) 1) |
||||
|
コンプライアンス管理 |
O(回転を除く3つの平行移動方向でのみ設定可能) |
O(FTSベース) |
O |
O |
O |
|
O (パレタイジングモードが「ON」に設定されている場合: コンプライアンス制御出力制限(ベースRx、Ry方向) 1) |
O (パレタイジングモードが「ON」に設定されている場合: コンプライアンス制御出力制限(ベースRx、Ry方向) 1) |
||||
|
強制的な監視 (ティーチペンダント) |
X |
O(FTSベース) |
O(特異点の場合は力の値「0」が表示される) |
O(特異点の場合は力の値「0」が表示される) |
O(特異点の場合は力の値「0」が表示される) |
|
O (パレタイジングモードが「ON」に設定されている場合: ベース(x、y、z、Rz)に提供される4自由度 |
O (パレタイジングモードが「ON」に設定されている場合: ベース(x、y、z、Rz)に提供される4自由度 |
||||
|
強制的な監視 (DART-STUDIO) |
O(特異点の場合は力の値「0」が表示される) |
O(FTSベース) |
O(特異点の場合は力の値「0」が表示される) |
O(特異点の場合は力の値「0」が表示される) |
O(特異点の場合は力の値「0」が表示される) |
|
O (パレタイジングモードが「ON」に設定されている場合: ベース(x、y、z、Rz)に提供される4自由度 |
O (パレタイジングモードが「ON」に設定されている場合: ベース(x、y、z、Rz)に提供される4自由度 |
||||
|
強制的な監視 (DRLコマンドを使用する場合:check_force_condition()
|
O(特異点の場合は力の値「0」が表示される) |
O(FTSベース) |
O(特異点の場合は力の値「0」が表示される) |
O(特異点の場合は力の値「0」が表示される) |
O(特異点の場合は力の値「0」が表示される) |
|
O (パレタイジングモードが「ON」に設定されている場合: ベース(x、y、z、Rz)に提供される4自由度 |
O (パレタイジングモードが「ON」に設定されている場合: ベース(x、y、z、Rz)に提供される4自由度 |
制御出力制限(Base Rx、Ry方向):ベースRx,Ry方向に対応する力またはコンプライアンス制御値に対応する力またはコンプライアンス制御値は出力されない。関連する軸(Base Rx, Ry)の力またはコンプライアンス制御値の入力は「0」として無視される。
特異点の概要
多関節ロボットにおける特異点は、ロボットが移動中に次のポーズを計算するのが困難な位置(または多関節ロボットの点)を指す。多関節ロボットは、ロボット端部に基づいて移動中の各関節角度を計算する。
例えば、図4では。 図1に示すように、ロボットが赤い点に移動している場合、ロボットは姿勢Aと姿勢Bのどちらに関節を動かすかを判断できない。 2.この位置(または点)は特異点と呼ばれる。
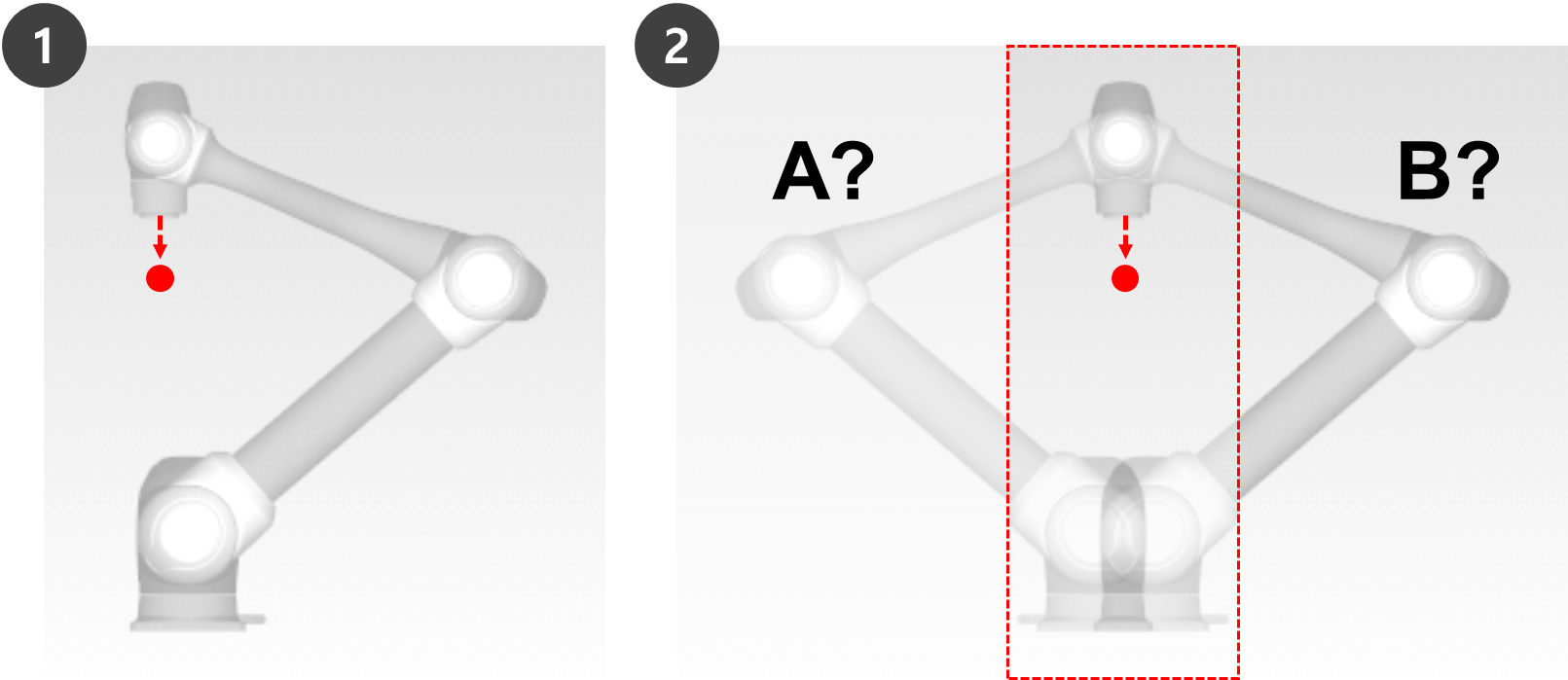
特異点の近くでは、ロボットの動きは平面、点、線の点で流体ではなく、ロボットの端の直線運動が維持されず、制御中の位置誤差が増加する可能性がある。特異点は、ロボットジョイントが直線を形成する場合も含め、下図に示す3つのケースで発生する。
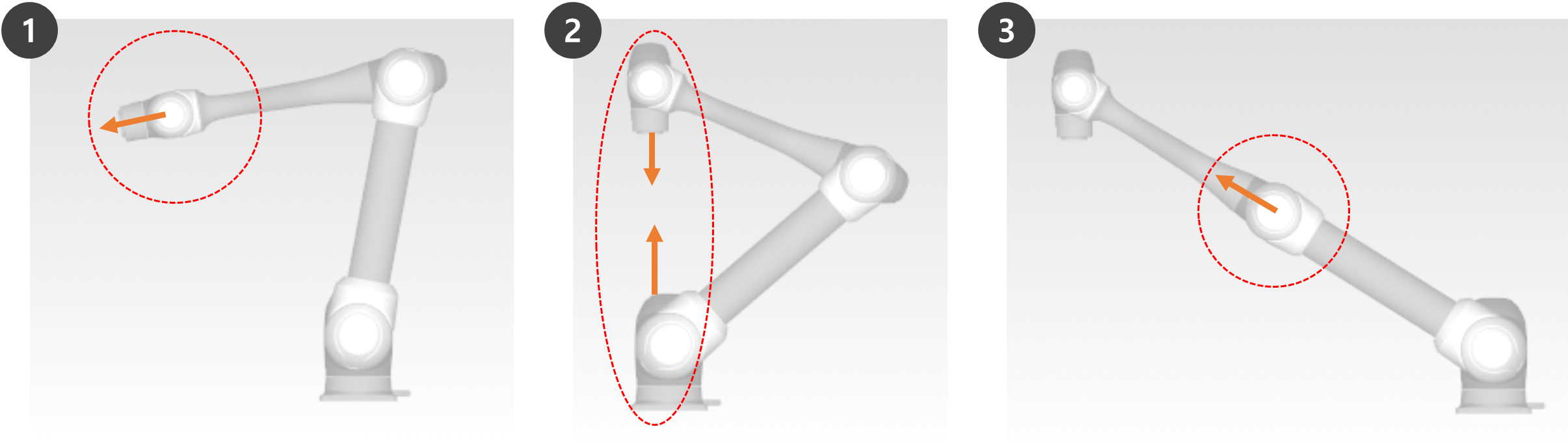
-
手首の特異点:軸5が0 º に近づいたときにロボットの手首が直線を形成した場合
-
人間の腕と比較すると、軸4、5、6は手首の関節に相当する。
-
-
肩の特異点:軸1と軸6が同じ直線上にある場合
-
人間の腕と比較すると、軸1と軸2は肩関節に対応する。
-
-
肘の特異点:軸3が0 º に近づくとロボットが直線を形成するとき
-
人間の腕と比較すると、軸3は肘に相当する。
-
注意
-
ジョイント回転を伴う手動操作および自動操作は、特異点の影響を受けない。
-
関節移動、MoveJコマンドなど
-
-
特異点は、ロボットが直線移動を実行する終了する手動および自動操作中にのみ発生する。
-
タスクの移動、MoveLコマンドなど
-
-
特異性ゾーンでは、力制御またはコンプライアンス制御が使用できない。
-
直線運動が特異点を通過すると、特定の軸の回転速度が急速に増加するため、ジョイント速度制限違反またはジョイント角度制限違反が発生する可能性がある。
特異点を回避する方法
斗山ロボティクスのロボットは、モーションコントロール中に特異点を回避するオプションを提供する。ただし、特異点領域ではMoveJなどのジョイント移動コマンドを使用して例外を作成しないタスクを設定することが推奨される。
斗山ロボットが提供する特異点回避オプションは次のとおりである。
-
自動回避:特異点を回避して動作を実行する。ただし、ロボットの動作は予想されるパスと異なる場合がある。
-
パスの優先度:パスと速度を維持するが、特異点付近のエラーにより停止することがある。
-
可変速度:パスを維持するが、特異点付近で減速する。
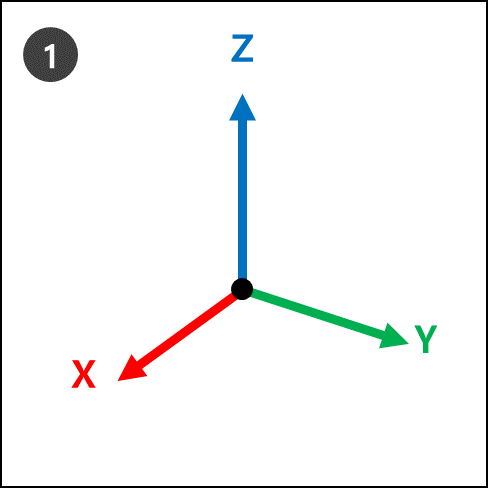
オイラー角度の概要
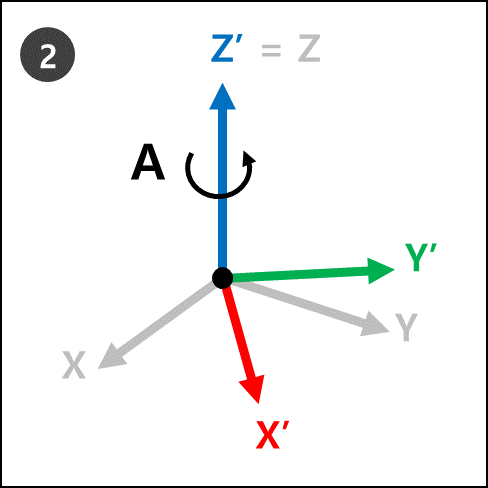
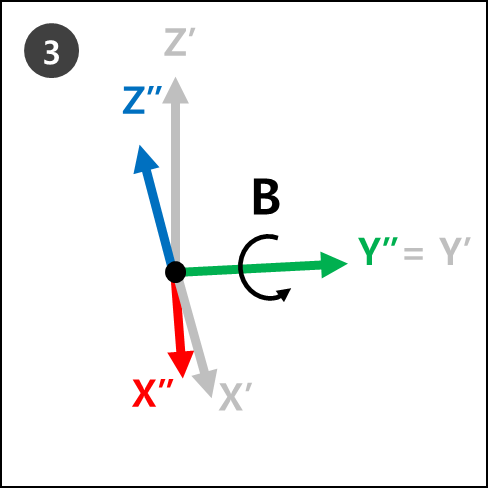
オイラー角度は、物体の方向に垂直なX、Y、Z軸の角度を表現する方法である。A、B、Cは順次回転角度を指す。 Rz-Ry-Rz、Rz-Ry-Rx、Rx-Ry-Rzのように、このA、B、Cの回転順序をロボットの製造業者によって定義している。 .
たとえば、 Rz-Ry-Rx。.ここで、 Rzは Z軸の回転、 Ryは Y軸の回転、 Rxは X軸の回転を意味する。Rzは角度A、Ryは角度B、Rxは角度Cとして表され、物体の現在の回転方向を示す。座標からZ軸方向に回転すると、新しい座標に基づいて回転が行われることに注意。
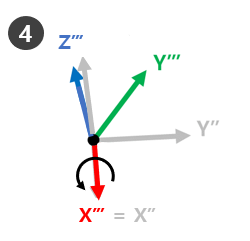
これはステップ1から4で視覚化することができる。
|
|
|
|
-
ステップ4の新しい座標(Z’’, Y’’’, X’’’’'は、オイラー角度A、B、およびCが適用されたときの現在のロボット回転を参照する。
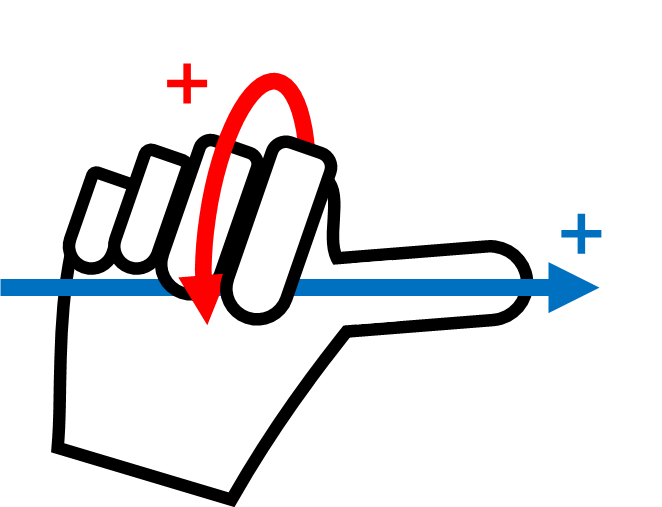
これは右手で簡単に視覚化できる。右手で次のポーズをとる。これを右手の法則と呼び、親指(X軸)、人差し指(Y軸)、中指(Z軸)を互いに垂直にすることで、X軸、Y軸、Z軸からなる座標を作成する。
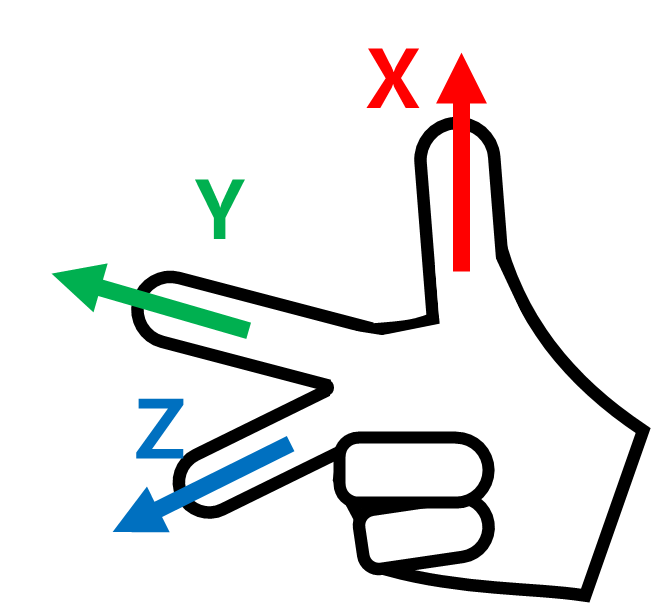
次に右手の直交規則ポーズをとり、Rz、Ry、Rxを順番に回転させる。
-
Rz:中指(Z軸)を1度回転させる。
-
Ry:人差し指(Y軸)をB度回転させる。
-
Rx(処方):親指(X軸)をC度回転させる。
注釈
A、B、Cの+回転方向の+回転方向は、親指を+方向に向けて4本の指を握り締めたときの親指以外の4本の指の方向である。これを時計回りねじの法則と呼ぶ。