기능
-
모바일 로봇(husky) 예제를 제공합니다.
(자세한 로봇 환경 구성은 5장. dsr_launcher 을 참조하시기 바랍니다.)
-
dsr_launcher 실행 시, mobile:=husky 인자를 줍니다.
-
예제 파일은 python 으로 작성 되어 있습니다.
- python 소스 위치: ~/catkin_ws/src/doosan-robot/dsr_example/py/scripts/mobile
dsr_launcher 인자
|
인수명 |
자료형 |
기본값 |
설명 |
|---|---|---|---|
|
ns |
- |
dsr01 |
ROBOT name space . single robot : dsr01 . multi robot: dsr01 부터 순차적으로 dsr02, dsr03, dsr04 … |
|
host |
- |
127.0.0.1 |
로봇 제어기 IP . 애뮬레이터 : 127.0.0.1 . 실제 로봇제어기 : 192.168.127.100 |
|
port |
- |
12345 |
서비스 port |
|
mode |
- |
virtual |
로봇 동작 모드 - virtual : 가상 동작 - real : 실제 동작 |
|
model |
- |
m1013 |
M-Series 로봇 모델 . m0609, m0617, m1013, m1509 A-Series 로봇 모델 . a0509 |
|
color |
- |
white |
로봇 컬러 . white or blue |
|
gripper |
- |
none |
gripper 사용 유무 . none : gripper 미 사용 . robotiq_2f : robotiq two finger 장착 |
|
mobile |
- |
none |
Mobile robot 사용 유무 . none : 미 사용 . husky : husky 모바일 로봇 사용 |
예제
1. 로봇 제어기 default IP/Port
- IP : 192.168.127.100 , port = 12345
2. launch : single robot + mobile
- single robot in rviz
$ roslaunch dsr_launcher single_robot_rviz.launch model:=m1013 mobile:=husky
- single robot in gazebo
$ roslaunch dsr_launcher single_robot_gazebo.launch model:=m1013 mobile:=husky
- single robot in rviz + gazebo
$ roslaunch dsr_launcher single_robot_rviz_gazebo.launch model:=m1013 mobile:=husky
3. run application node
- 예제 파일 수정
. 구동하고자 하는 예제 파일을 열어 ROBOT_ID 와 ROBOT_MODEL을 맞게 수정합니다.
.. ex>
ROBOT_ID = "dsr01"
ROBOT_MODEL = "m1013"
$ rosrun dsr_example_py single_robot_moblie.py
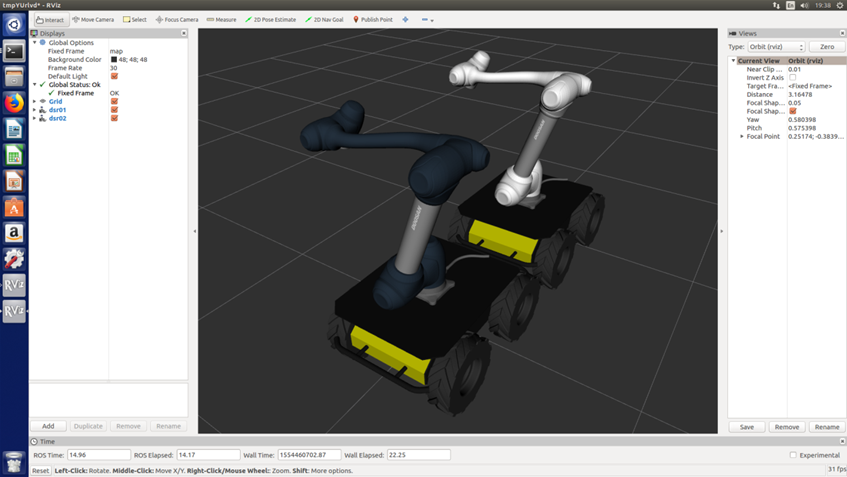
그림 6.5 robot on mobile