注意
サンプルを試す前に、必ず注意事項を読んで従うこと。 .詳しくは、 パート1を参照のこと。安全マニュアル。.
注釈
-
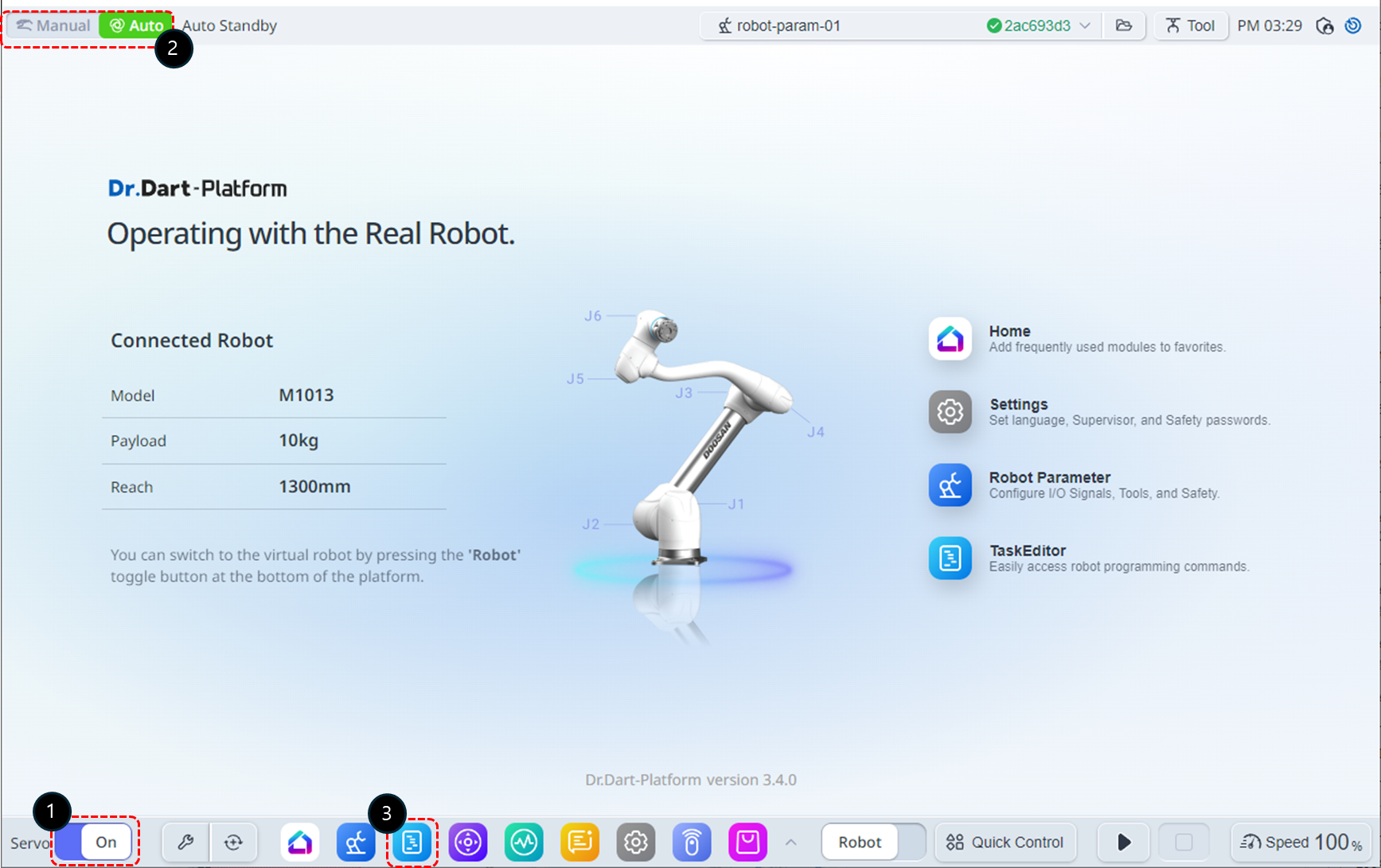
サーボ状態をオンに変更する
-
操作モードを手動に切り替える。
-
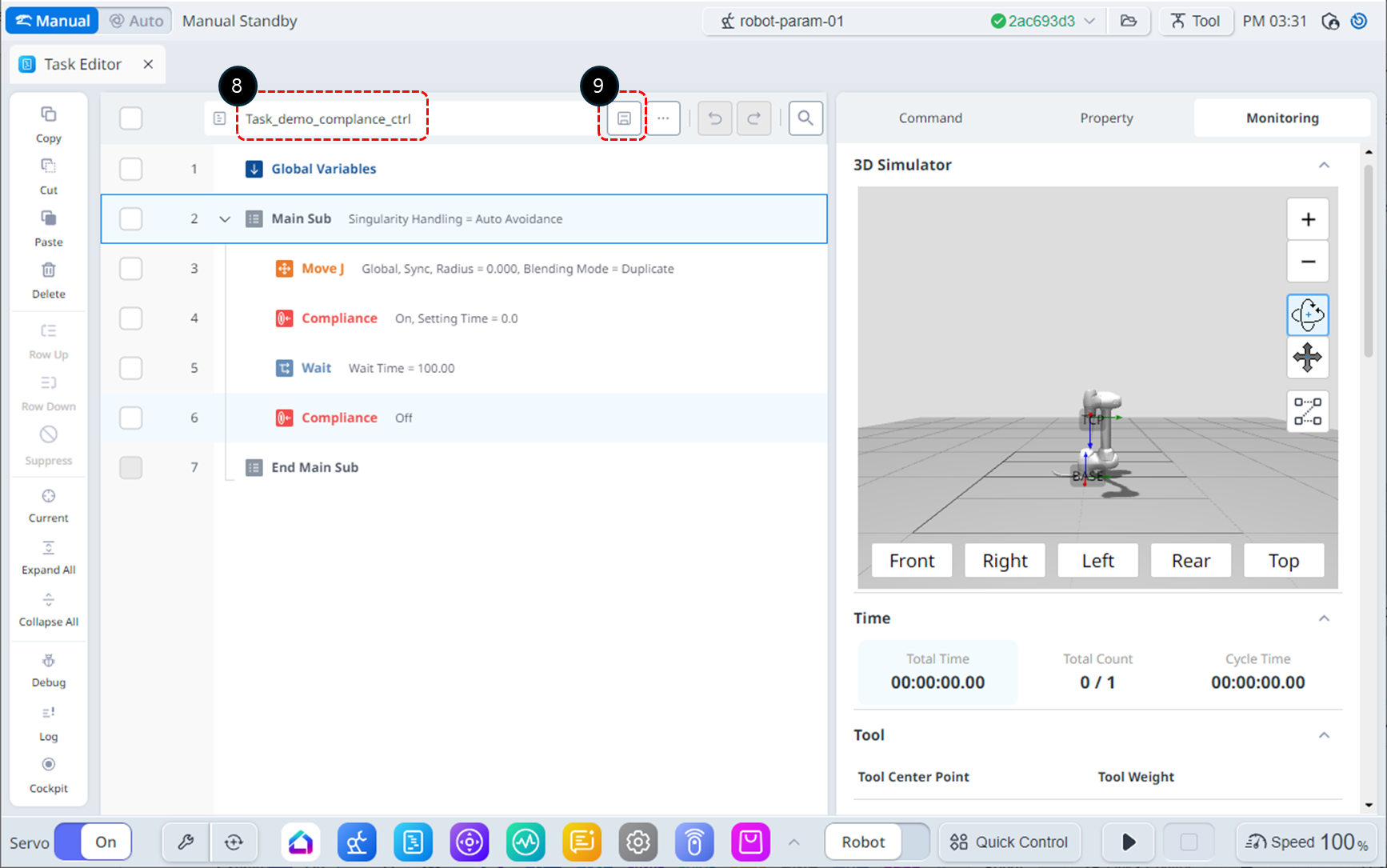
下部メニューからタスクエディターモジュールを選択する。
-
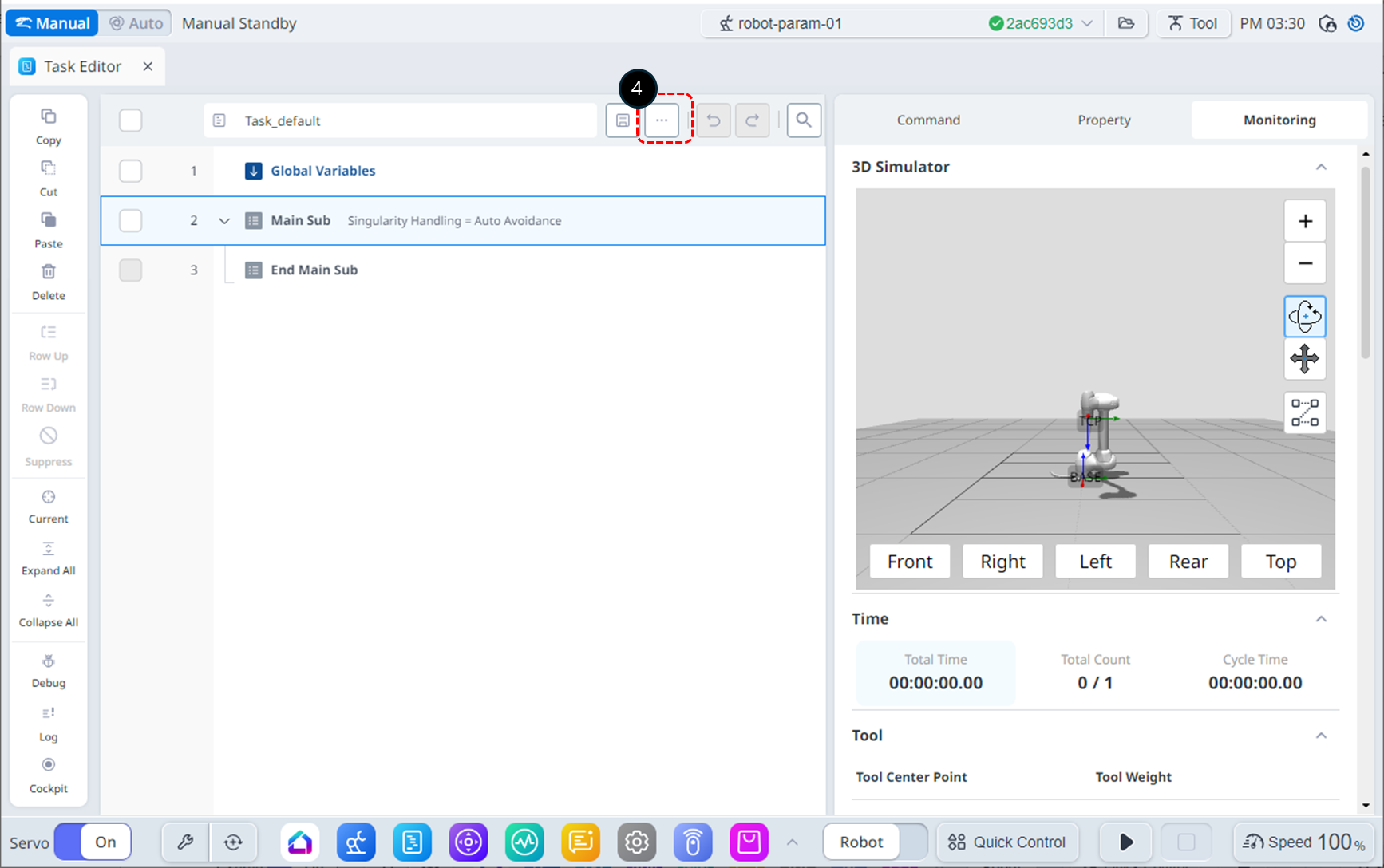
[ファイル(File)]ボタンをクリックする。
-
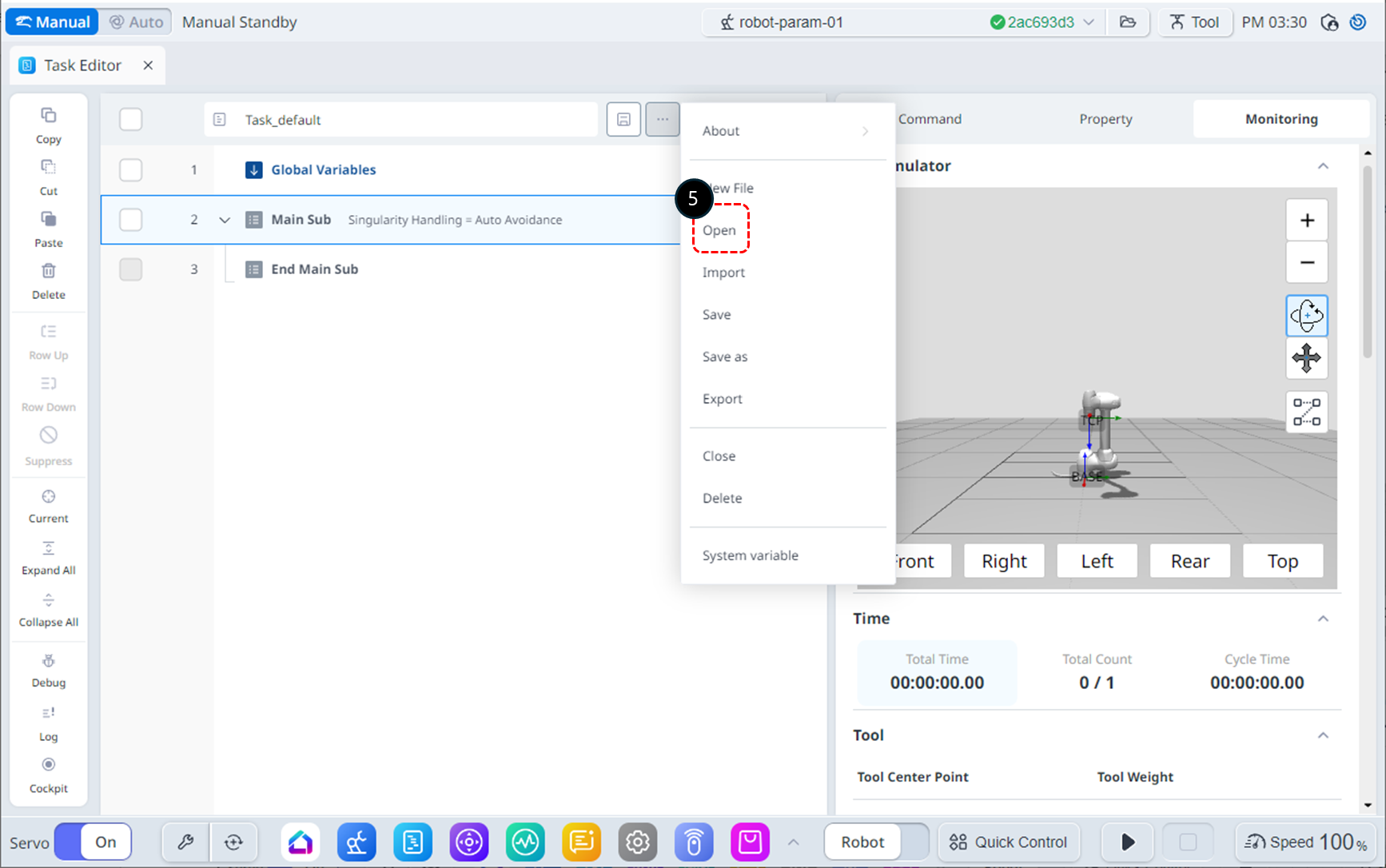
[開く(Open)]ボタンをクリックする。
-
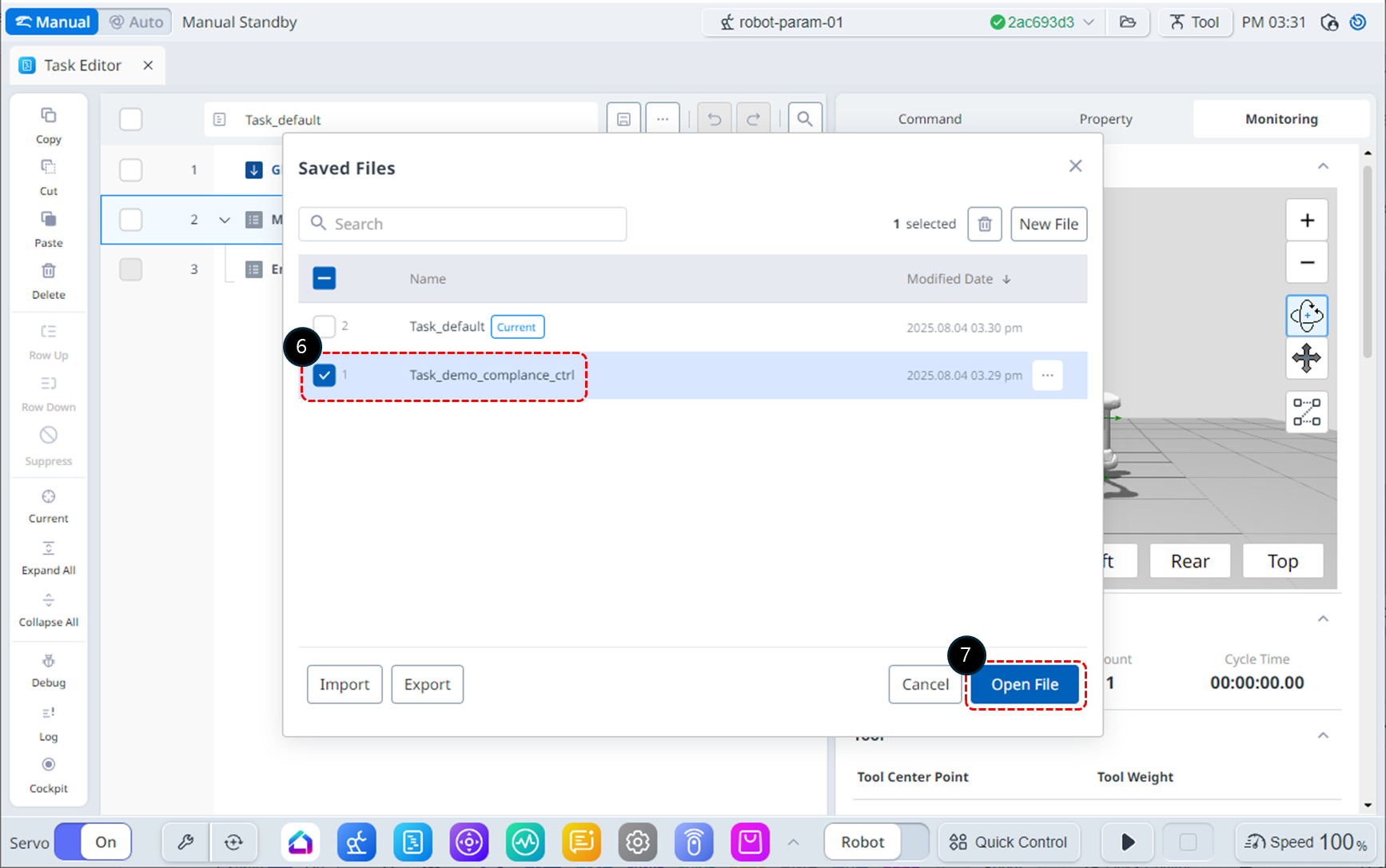
Try Complianceコマンドのサンプルで作成したTask_demo_compliance_ctrlファイルを選択する。.
-
[ファイルを開く(Open File)]ボタンをクリックする。
-
ファイルの名前をTask_demo_force_ctrlに変更する。
-
[保存(Save)]ボタンをクリックして、ファイル名を保存する。
-
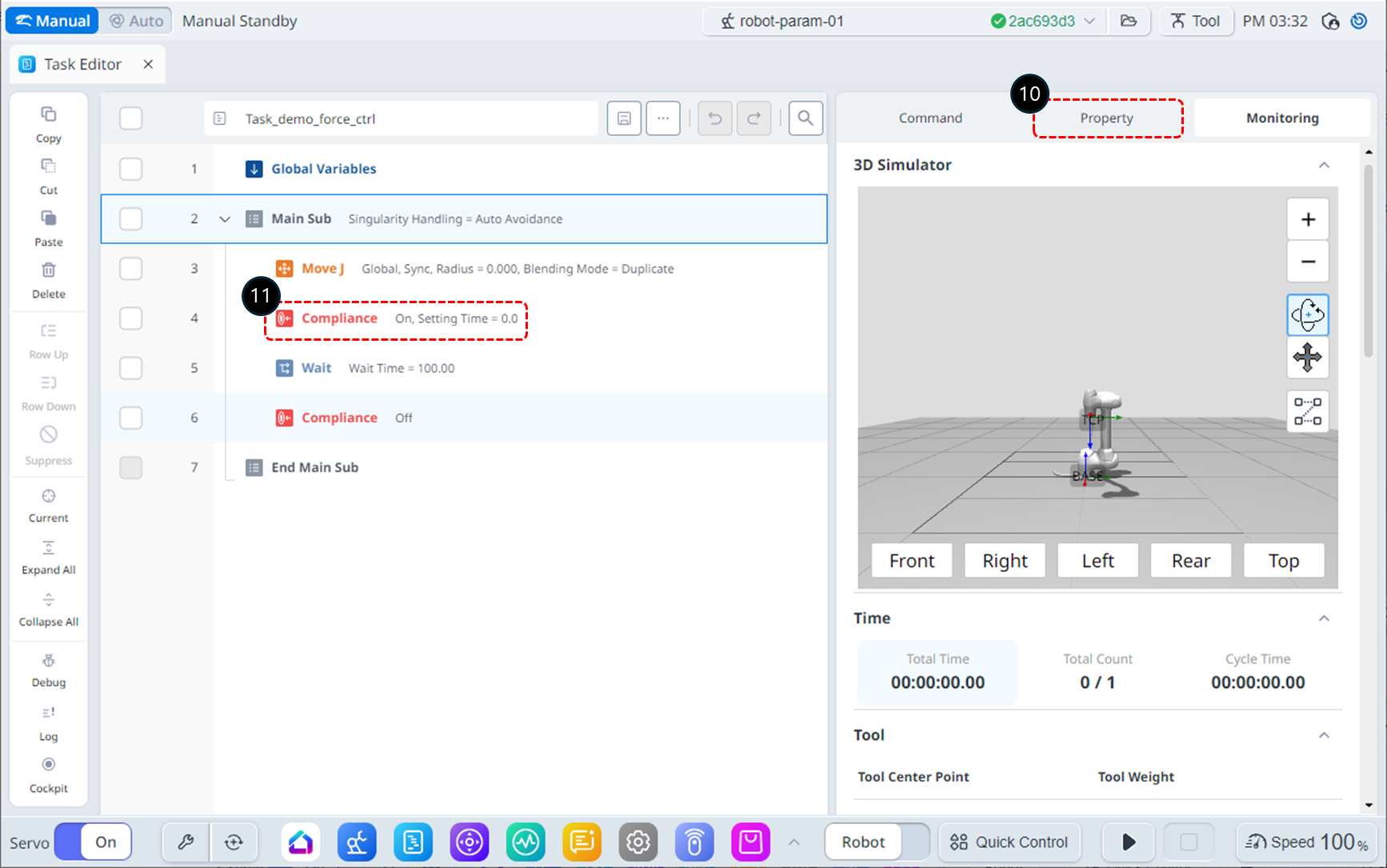
[プロパティ(Property)]タブを選択する。
-
4行目で[コンプライアンス(Compliance)]コマンドを選択する。
-
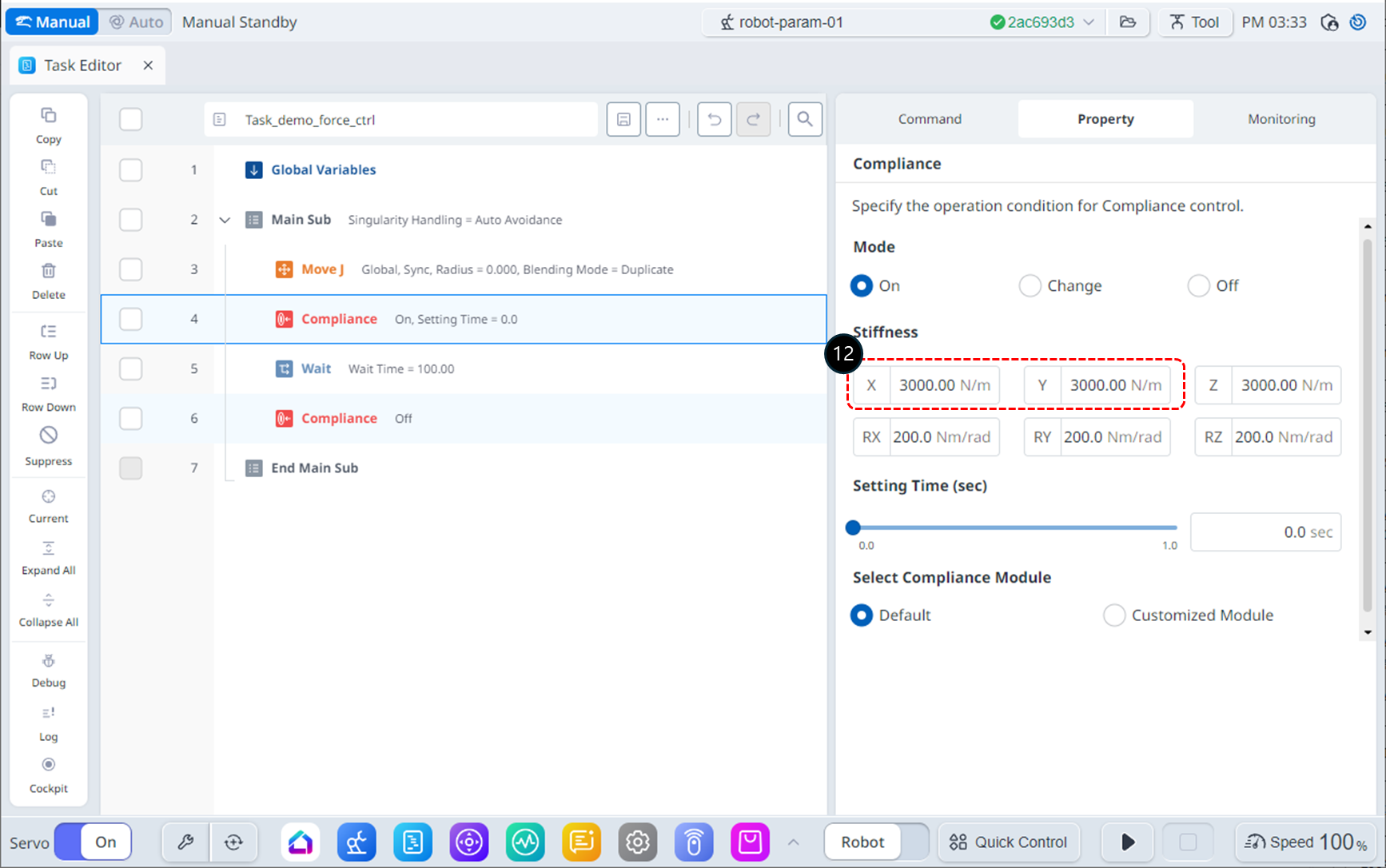
次のように、[剛性(Stiffness)]をデフォルト値に設定する。
-
X、Y、Z:3000 N/m(デフォルト)
-
Rx、Ry、Rz:200 Nm/rad(デフォルト)
-
-
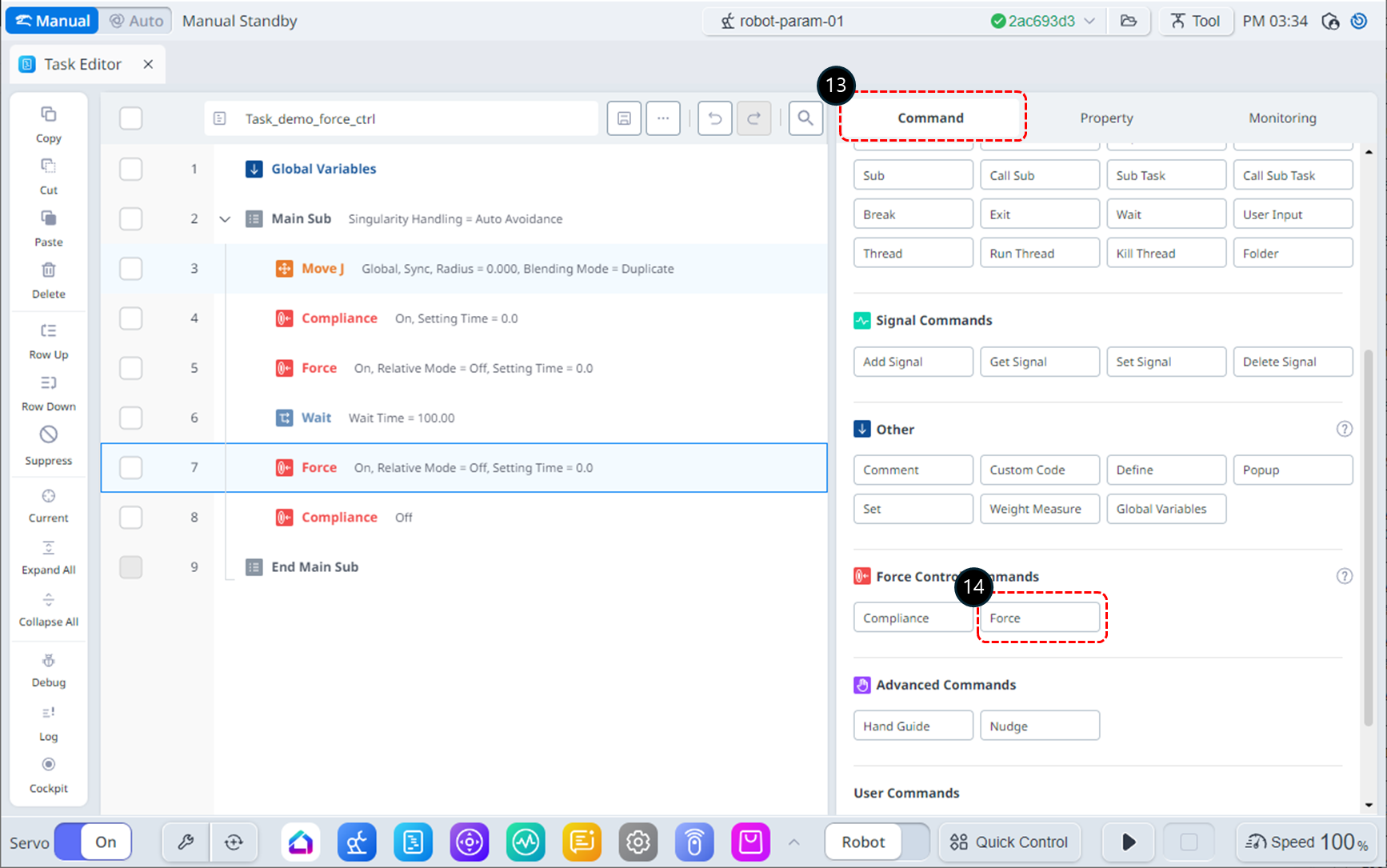
[コマンド(Command)]タブを選択する。
-
力コマンドを5行目と7行目に追加する。これらのコマンドを使用して、強制制御を活動化および非活動化する。
-
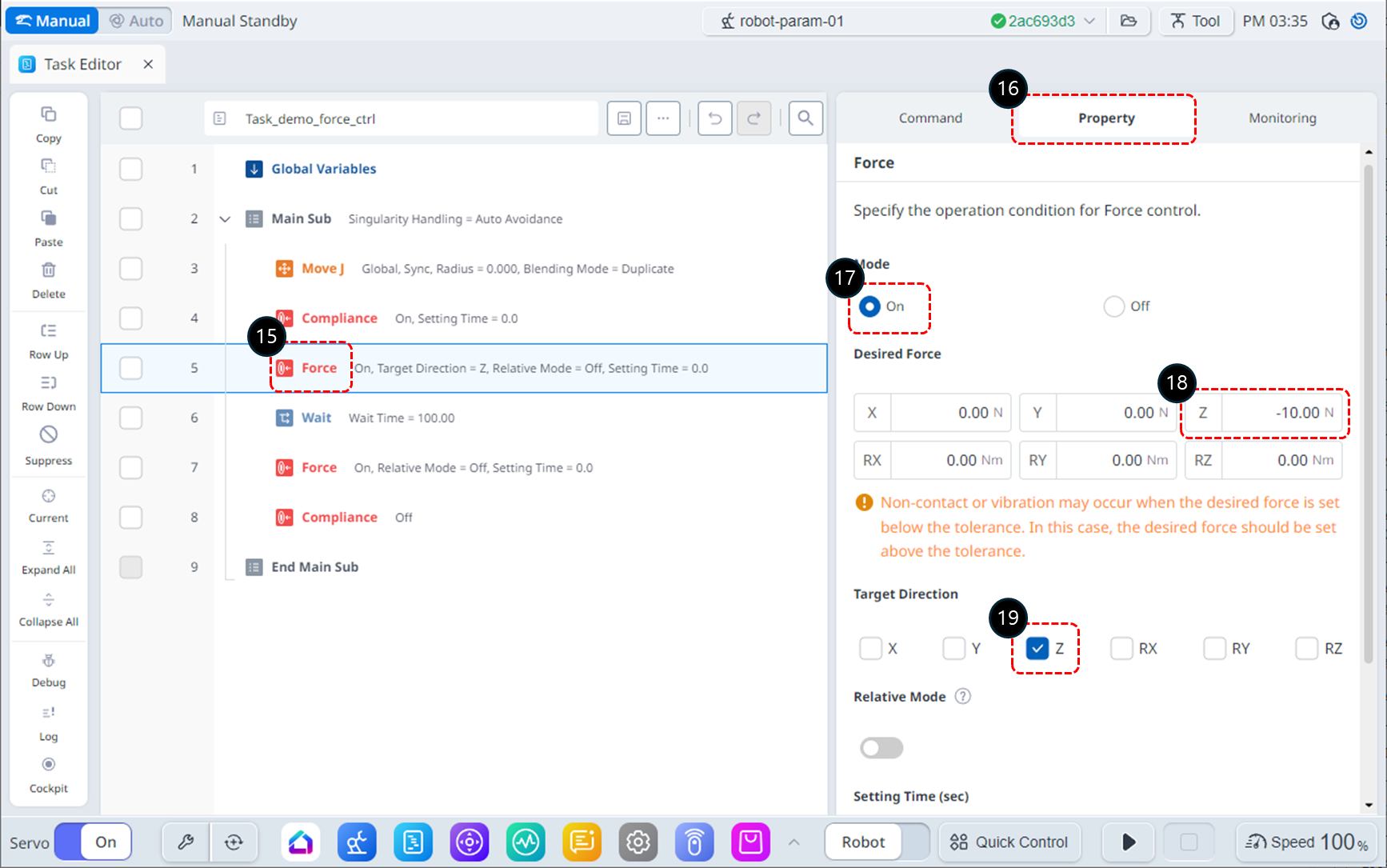
5行目で[力(Force)]コマンドを選択する。
-
[プロパティ(Property)]タブに移動する。
-
モードを次のように設定する。モードオンはフォースコントロールを有効にする。
-
モード:オン
-
-
必要な力を次のように設定する。
-
X:0 N(デフォルト)
-
Y:0 N(デフォルト)
-
Z:-10 N
-
Rx、Ry、Rz:0 Nm/rad(デフォルト)
-
-
ターゲット方向(Target Direction)で、Z軸のみをチェックする。
-
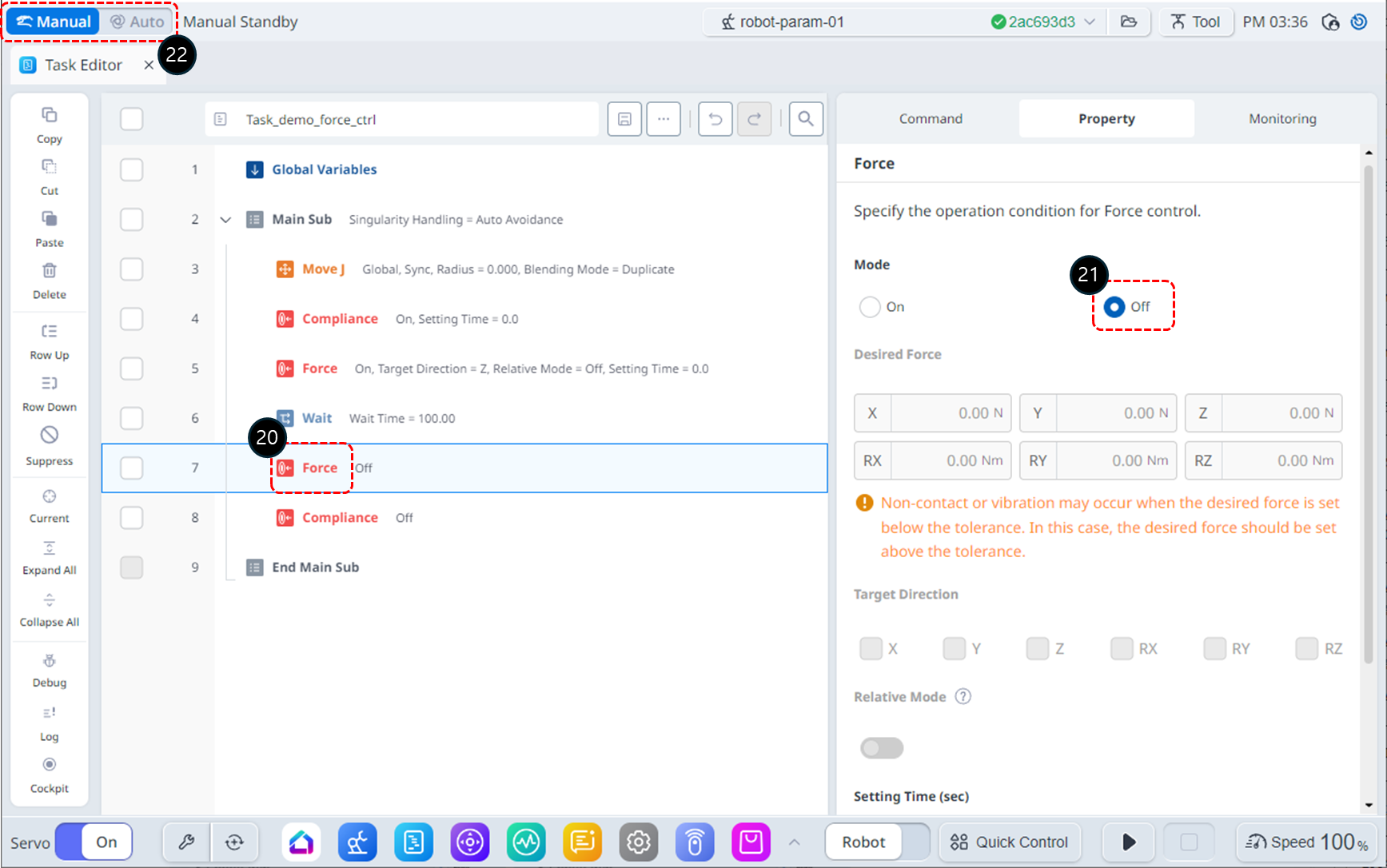
タスクリスト(Task List)で、7行目の強制コマンド(Force command on line 7)を選択する。
-
モードを次のように設定する。Mode Off強制制御を無効にする。
-
モード:オフ
-
-
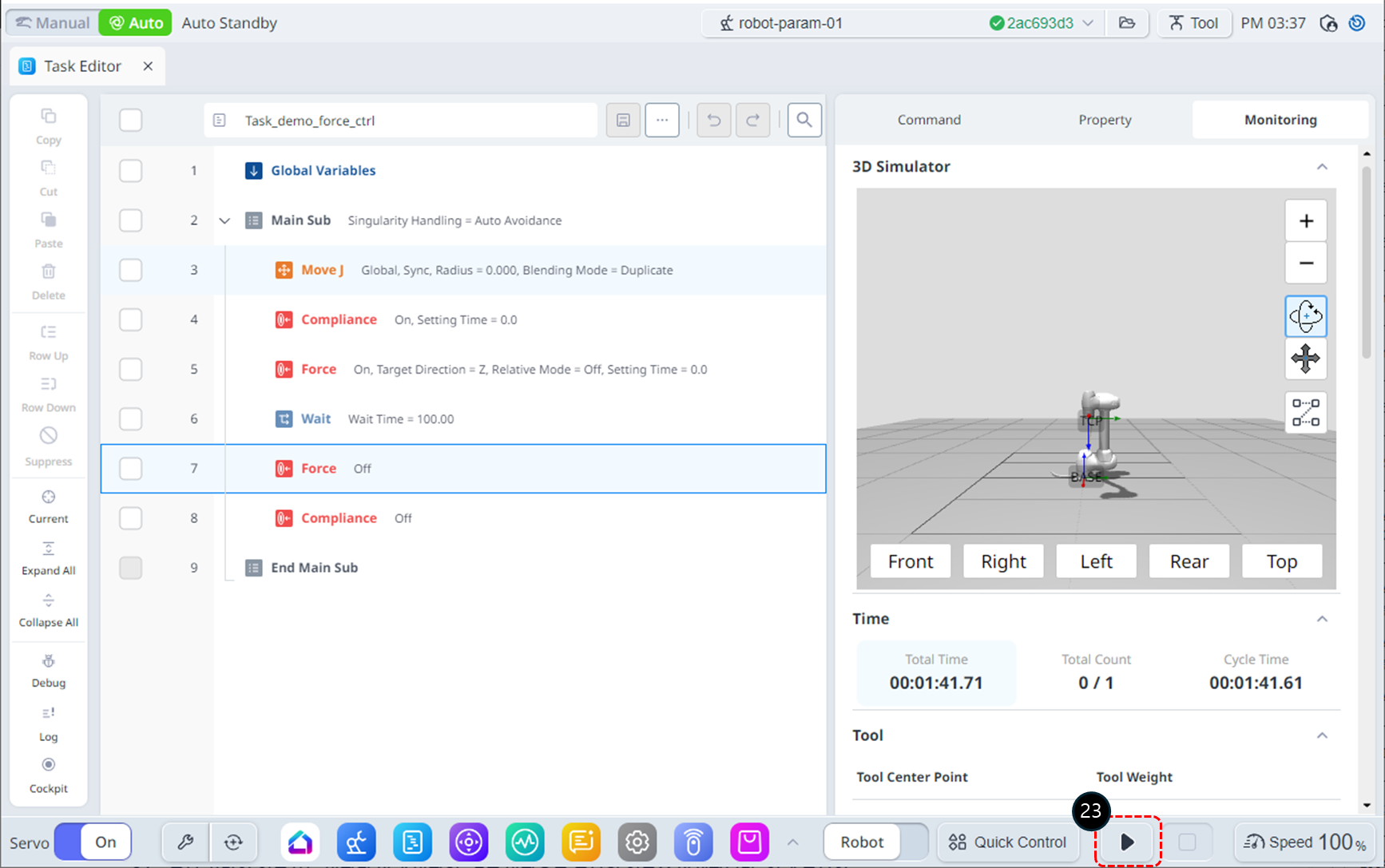
操作モードを自動に切り替える。[プロパティ(Property)]タブは自動的に[モニタリング(Monitoring)]タブに切り替わる。
Unknown Attachment
-
[実行(Run)]ボタンをクリックする。待機状態では、ロボットは次のように動作する。
-
ロボットのエンドエフェクターに-10Nの力が加えられ、ロボットは-Z方向にゆっくりと移動する。
-
ロボットの動きに反対する+Z方向に反作用力を加える。ロボットが加える力と対向力のバランスが取れていると、ロボットは静止しているかのようにその位置を保持しているように見える。
-
ロボットに+10N以上の力が加わると、ロボットは力のかかる方向に移動する。
-
-
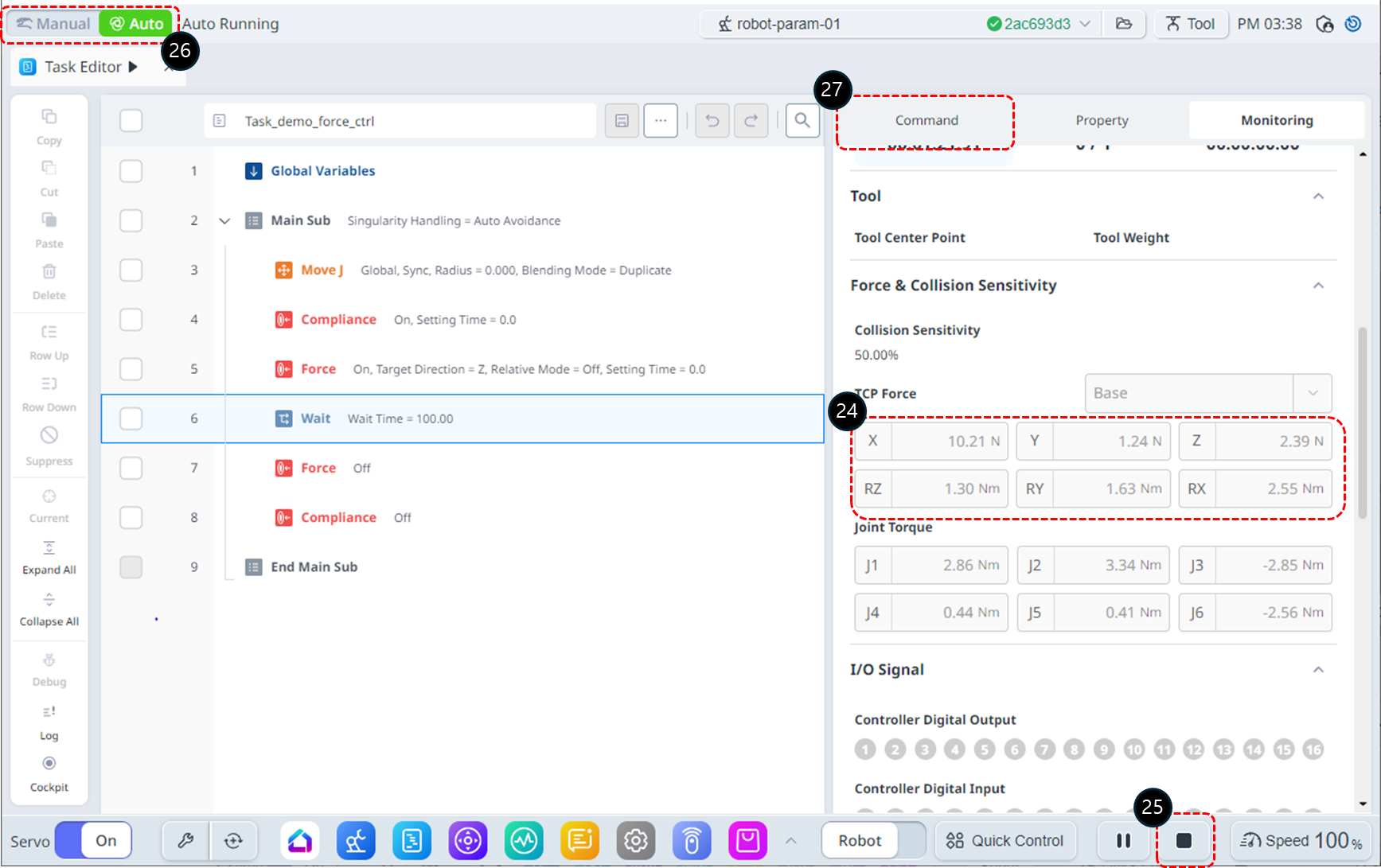
動作中は、MonitoringタブのTCP ForceセクションでリアルタイムのTCP Forceを監視できる。ロボットのエンドエフェクターに力が適用されていない場合、TCP力の値はすべて0であるはずであるが、エラーコンポーネントが表示されることがある。この問題に対処するための追加の説明を以下に示す。
-
[停止(Stop)]ボタンをクリックしてタスクを終了する。
-
タスクを修正するために、操作モードを手動に切り替える。
-
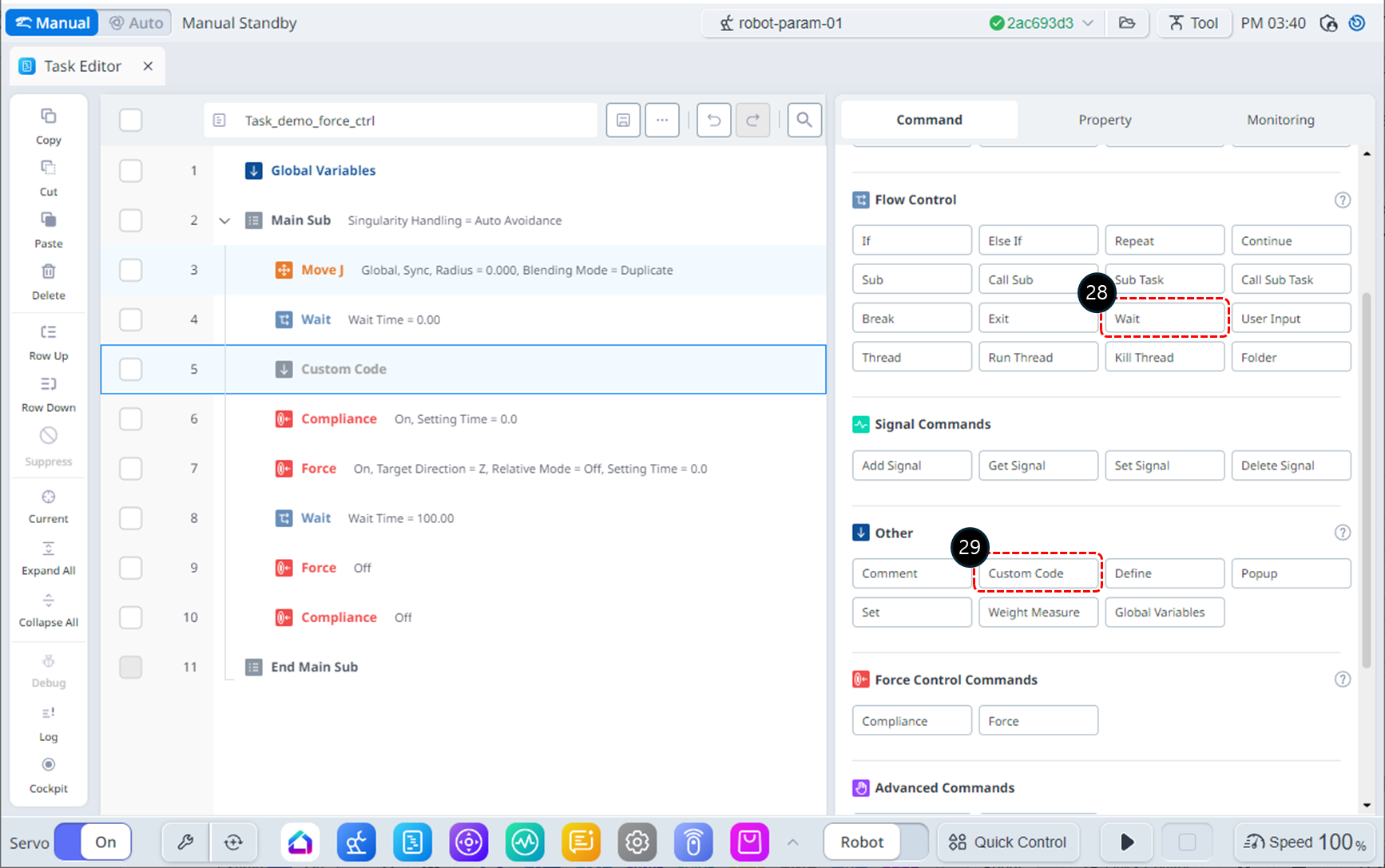
[コマンド(Command)]タブを選択する。
-
タスクリストの4行目にwaitコマンドを追加する。
-
タスクリストの5行目にカスタムコードコマンドを追加する。
-
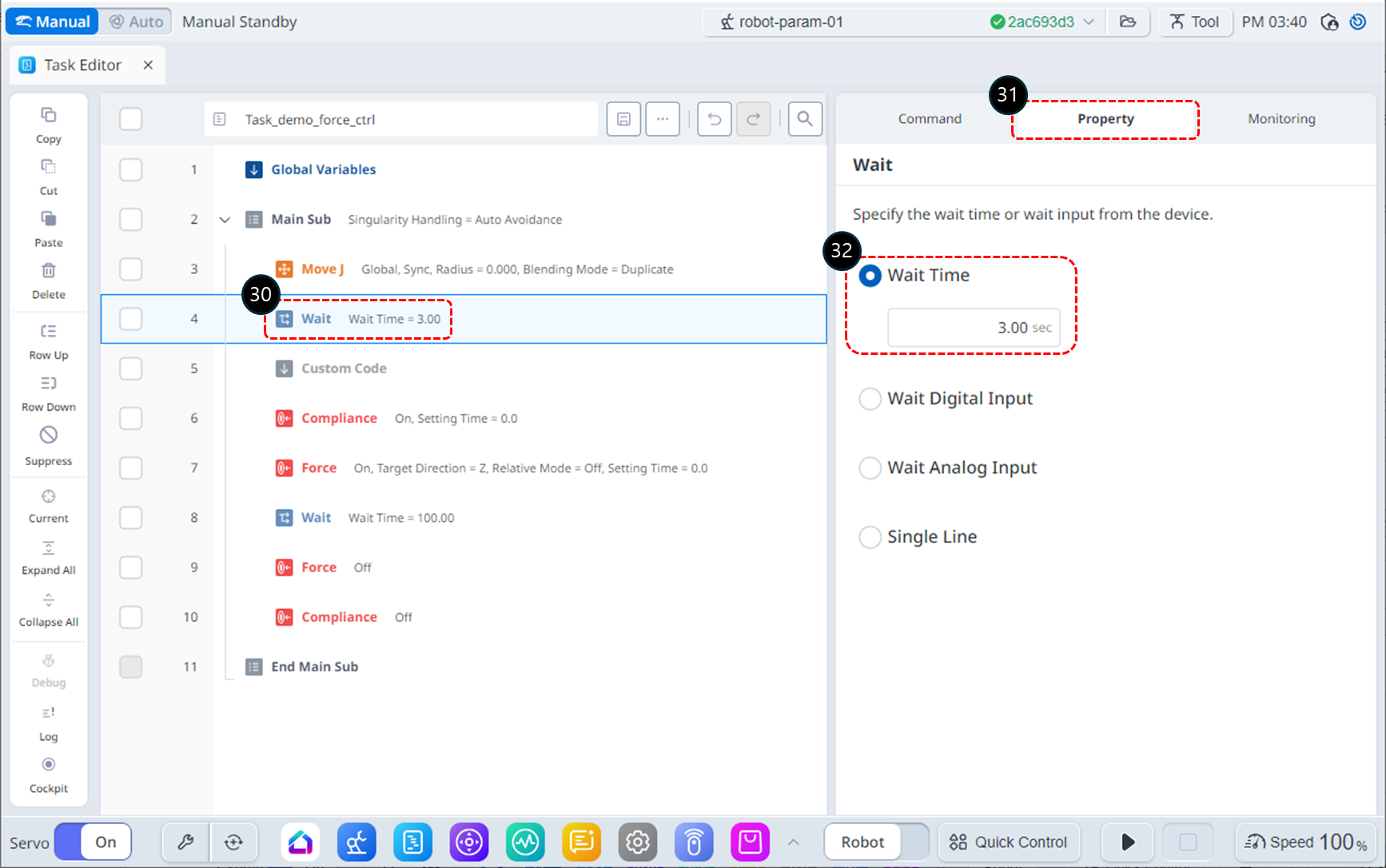
4行目のwaitコマンドを選択する。
-
[プロパティ(Property)]タブを選択する。
-
待機時間を次のように設定する。
-
待機時間:3秒
-
-
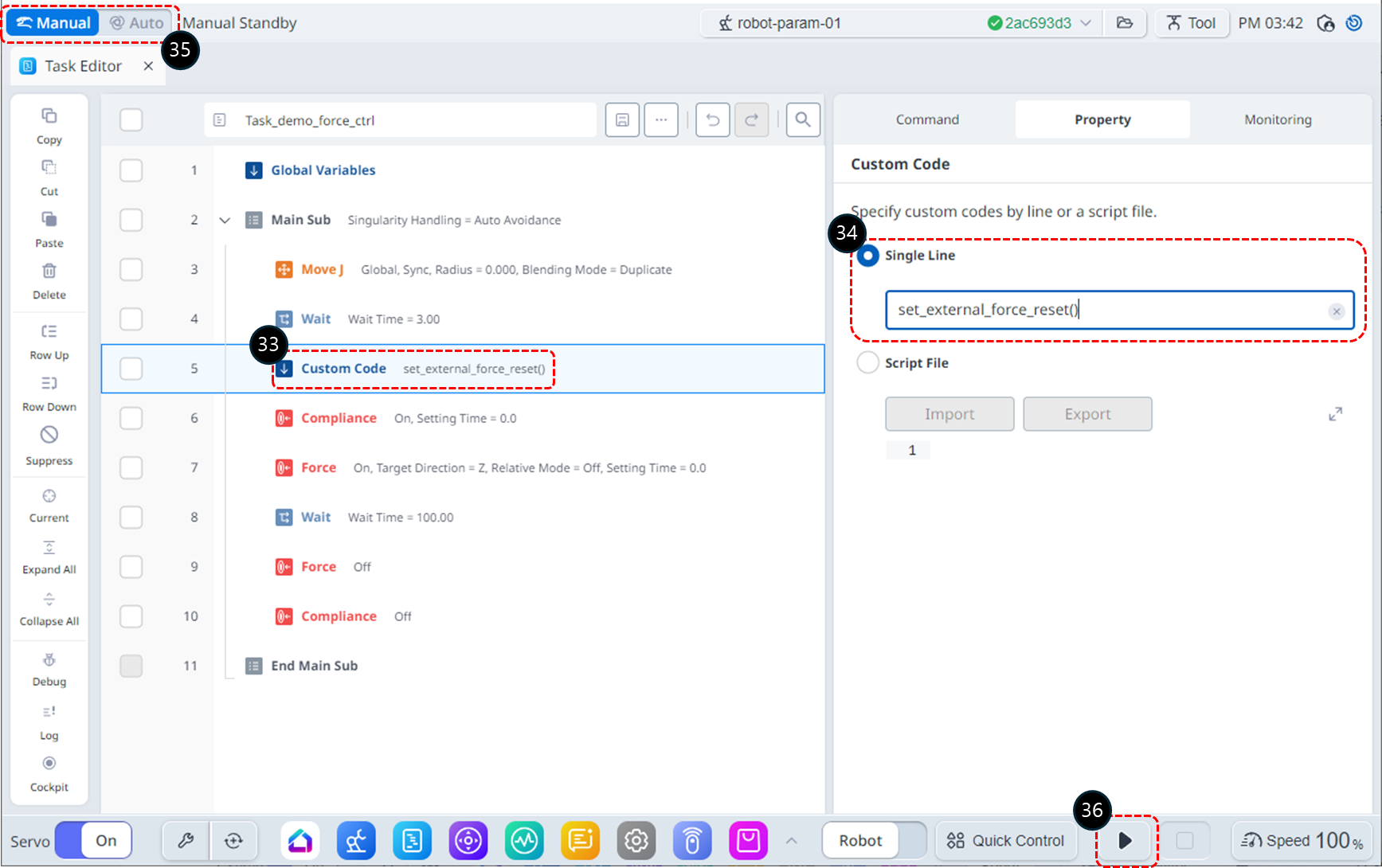
5行目の[カスタムコード]コマンドを選択する。
-
[単一行(Single Line)]を選択し、次のDRLコマンドを追加する。このコマンドは、外部フォースセンサの値をリセットしてエラーを除去する。
-
set_externl_force_reset()
-
-
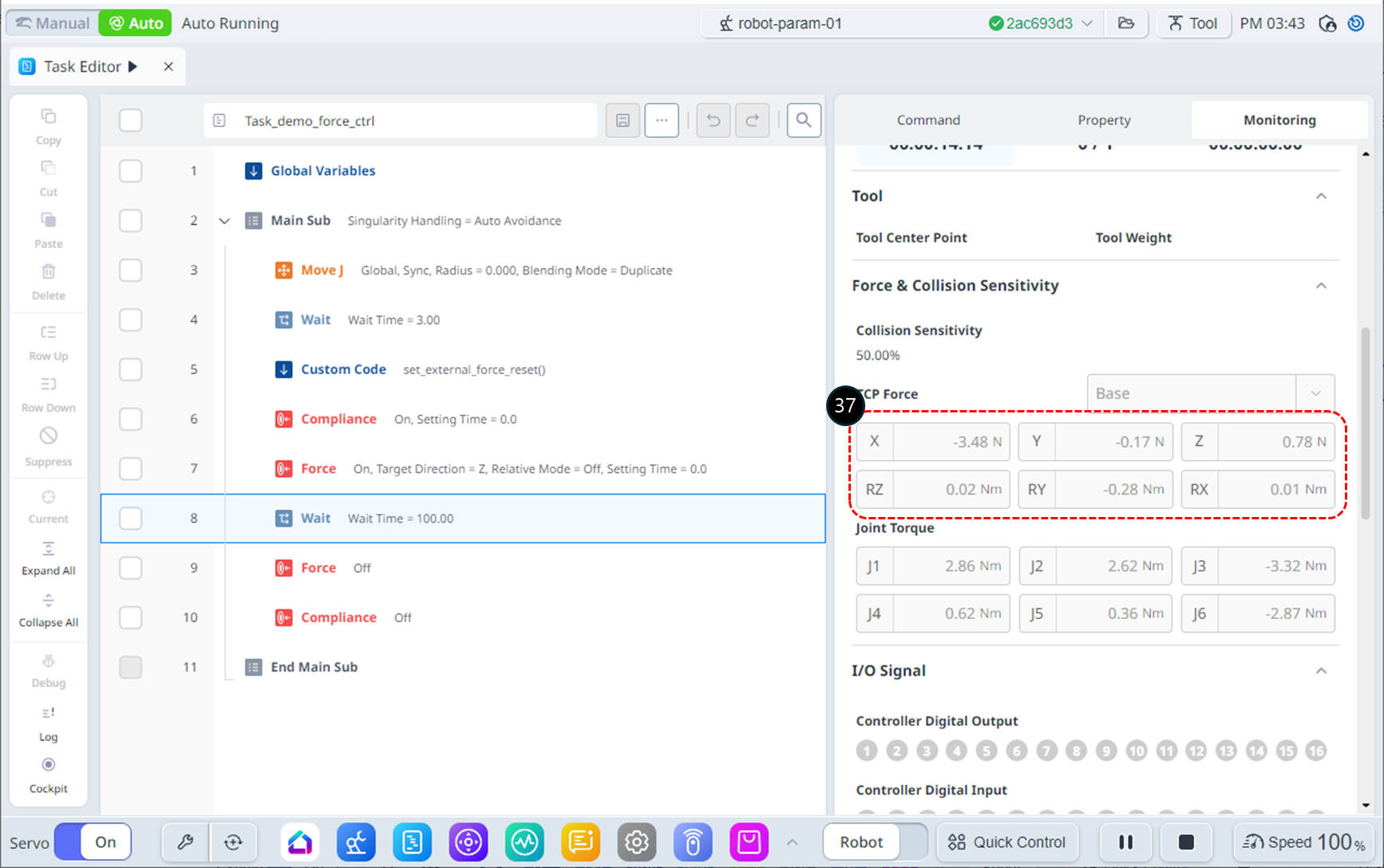
操作モードを自動に切り替える。[プロパティ(Property)]タブは自動的に[モニタリング(Monitoring)]タブに切り替わる。
-
[実行(Run)]ボタンをクリックする。
-
モニタリングタブで、TCP強制値をチェックする。set_external_force_reset ()コマンドを使用する前と比較して、エラーが減少していることに気づくだろう。