1.プログラムを作成する
事前に遠隔操作のプログラムを作成しなければならない。
-
タスクエディターモジュールでタスクを作成する。
-
作成が完了したら、タスクを保存する。
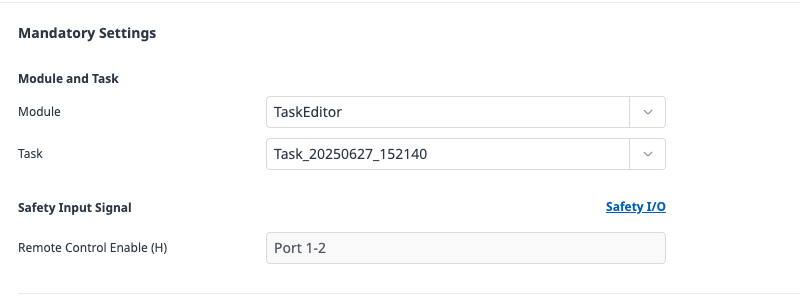
2.必須設定
リモートコントロール モジュールでは、次の必須項目を設定する必要がある。
-
モジュールとタスクを選択
-
実行するモジュールとタスクをリストから選択する。
-
-
リモートコントロール有効信号を指定する
-
ロボットパラメータモジュールの安全I/Oメニューで、 リモートコントロール有効 信号を選択し、使用するポートを割り当てる。
-
必要な設定が完了していない場合、リモートコントロールモードは実行できない。
3.詳細設定(オプション)
必要に応じて、詳細設定を指定できる。
設定されていない場合、この機能は無効のままで、リモートコントロールの動作に影響を与えない。
-
再起動時に自動的に開始

-
このオプションを有効にすると、ロボットの電源をオンにすると、システムは自動的にリモートコントロール画面に入る。
-
-
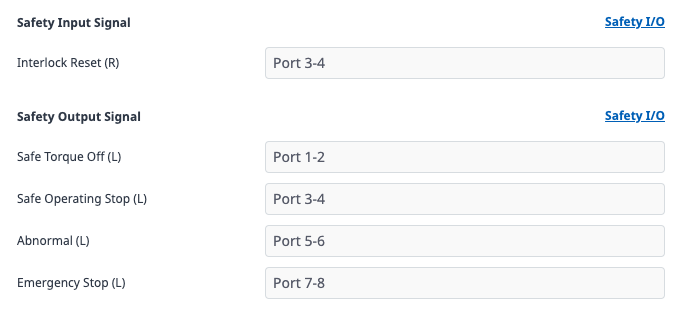
安全出力信号
-
STO(安全トルクオフ)およびSOS(安全動作停止)信号用の出力ポートを割り当てる。
-
注釈
各信号の詳細については、 安全信号I/Oを参照のこと。.
-
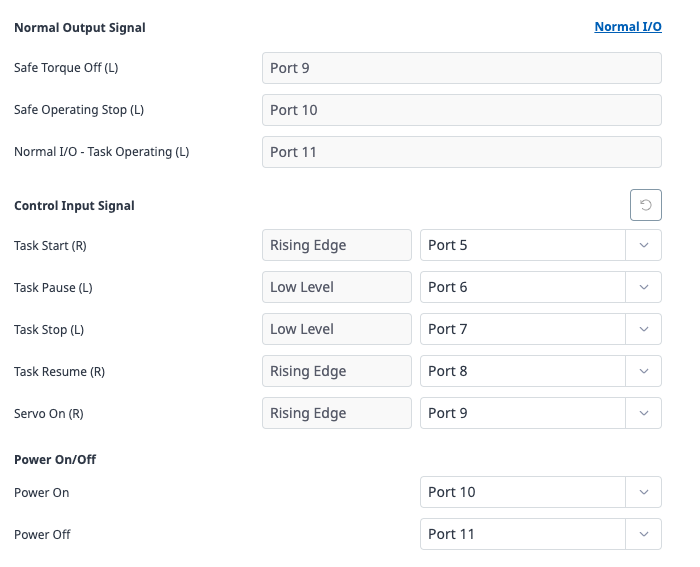
制御入力信号
-
Start、Stop、Pause、Resumeコマンドのデジタル入力ポートを設定する。
-
4.リモートコントロールモードに入る
セットアップが完了したら、リモートコントロールモードに入ることができる。
-
リモートコントロールモジュール画面で、「 Start Remote Control(リモートコントロールの開始)」 ボタンをクリックする。
5.リモートコントロールを実行する
指定したプログラムをリモートで実行し、その状態を監視する。
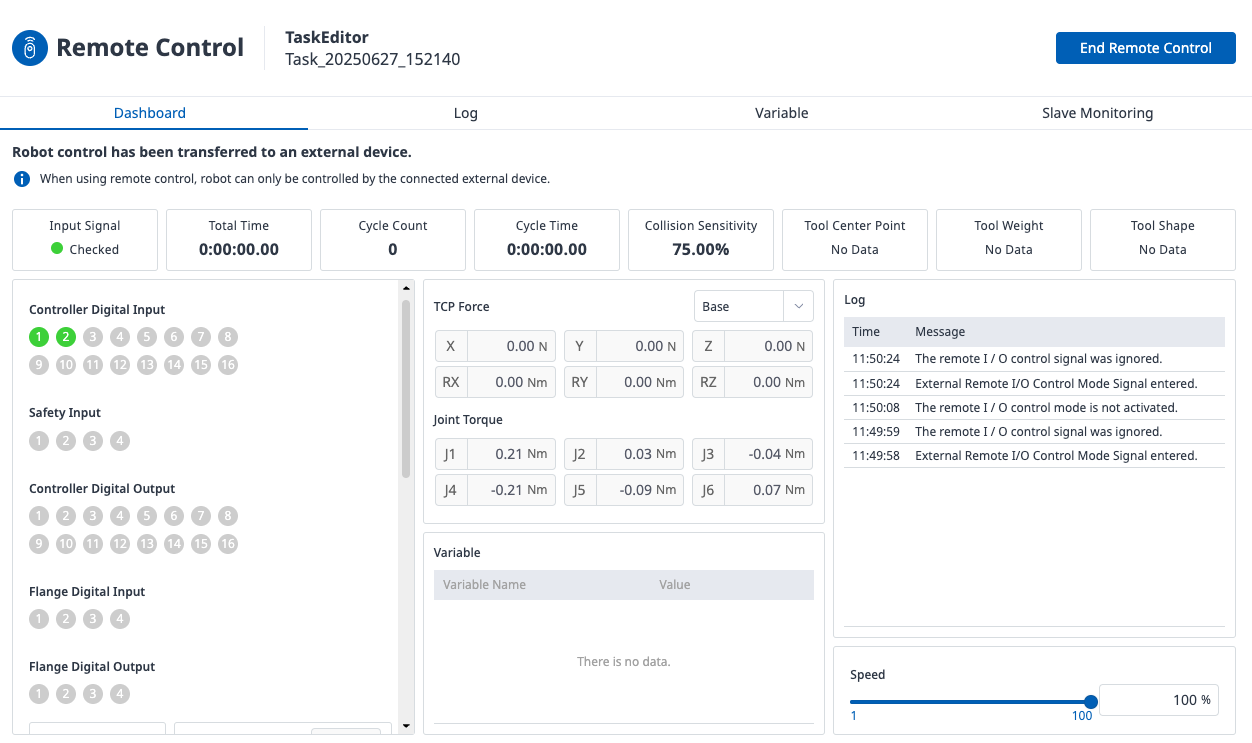
例えば、リモートコントロールモードに入った後にロボット上で指定タスクを実行したい場合は、サーボオン(立ち上がりエッジ)信号を割り当てられたポートに送信し、タスク開始(立ち上がりエッジ)信号を送信して、必要な設定で選択されたタスクを実行することで、サーボをアクティブ化することができる。
これらの信号はオプションであるため、ロボットはそれらなしでリモートコントロールモードに入ることができる。ただし、モード内でこれらのオプション機能を使用するには、必要なポートを割り当て、対応する信号を正しく適用する必要がある。