로봇이 직접 동작하여 머신의 문을 수동으로 열고 닫는 명령어입니다.
-
열고 닫는 동작을 수행하기 위하여 시작 점과 끝 점을 교시합니다.
-
기본 설정은 [열기] 이며 [닫기] 를 선택 한 경우 [시작 포즈] 와 [종료 포즈] 의 교시점이 바뀝니다.
-
단, 교시점이 바뀌는 것은 UI상 반영되지 않습니다.
기본 정보
|
항목 |
설명 |
|---|---|
|
추천 디바이스 |
없음 |
|
옵션 기능 |
|
|
명령어 완성 조건 |
[시작 포즈], [종료 포즈] 설정 |
|
지원 로봇 시리즈 |
E, A, AS, M, H |
기본 동작 순서
[접근 자세] 로 이동 → 시작 점([시작 포즈])으로 이동 → 끝 점([종료 포즈])으로 이동 → [후퇴 자세] 로 이동
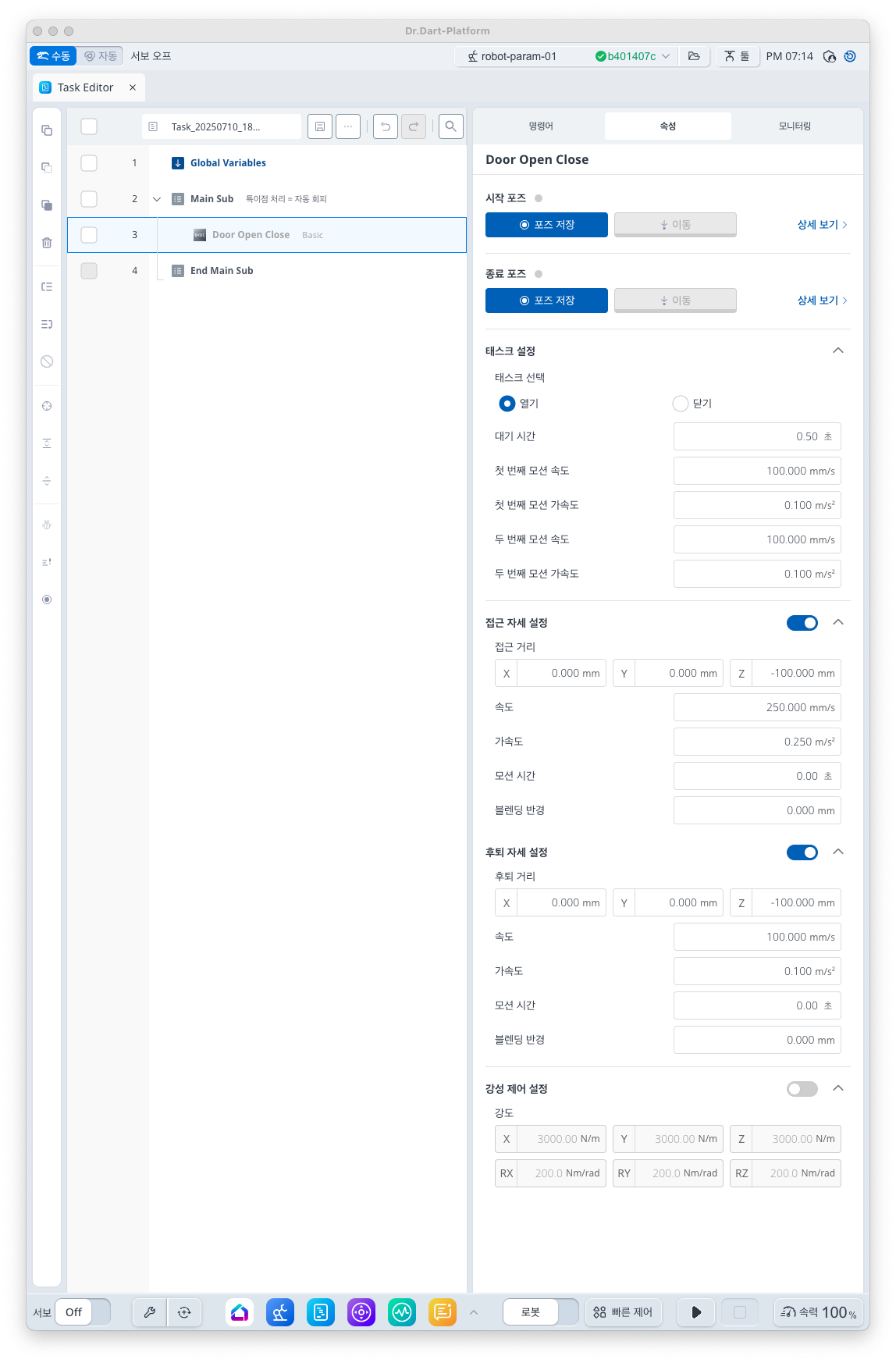
화면 정의
|
항목 |
설명 |
기본값 및 입력 범위 |
|
|---|---|---|---|
|
기본 설정 |
시작 포즈 |
교시점
|
|
|
종료 포즈 |
교시점
|
|
|
|
태스크 설정 |
태스크 선택 (옵션) |
작업 방향 선택
|
열기 [열기, 닫기] |
|
대기 시간 |
[시작 포즈] 이동 전 및 [종료 포즈] 이동 후 대기 시간 |
0.5 s [0 ~ 10000] |
|
|
첫 번째 모션 속도 |
진입점에서 첫번 째 교시점까지 이동하는 속도 |
100 mm/s [0.001 ~ 8000] |
|
|
첫 번째 모션 가속도 |
진입점에서 첫번 째 교시점까지 이동하는 가속도 |
0.1 m/s2 [0.001 ~ 20] |
|
|
두 번째 모션 속도 |
진입점에서 두번 째 교시점까지 이동하는 속도 |
100 mm/s [0.001 ~ 8000] |
|
|
두 번째 모션 가속도 |
진입점에서 두번 째 교시점까지 이동하는 가속도 |
0.1 m/s2 [0.001 ~ 20] |
|
|
접근 자세 설정 (옵션) |
사용 여부 |
접근 자세 사용 여부 선택 |
True [True, False] |
|
접근 거리 |
교시점으로부터 x, y, z 방향으로 떨어진 거리 |
[0, 0, -100] mm [-99999.999 ~ 99999.999] |
|
|
속도 |
진입점으로 가는 모션의 속도 |
250 mm/s [0.001 ~ 8000] |
|
|
가속도 |
진입점으로 가는 모션의 가속도 |
0.25 m/s2 [0.001 ~ 20] |
|
|
모션 시간 |
진입점으로 가는 모션의 시간
|
0 s [0 ~ 10000] |
|
|
블렌딩 반경 |
교시점과 후퇴간의 이동을 이어주는 블렌딩 반지름
|
0 mm [0 ~ 1000] |
|
|
후퇴 자세 설정 (옵션) |
사용 여부 |
후퇴 자세 사용 여부 선택 |
True [True, False] |
|
후퇴 거리 |
교시점으로부터 x, y, z 방향으로 떨어진 거리 |
[0, 0, -100] mm [-99999.999 ~ 99999.999] |
|
|
속도 |
후퇴점으로 가는 모션의 속도 |
100 mm/s [0.001 ~ 8000] |
|
|
가속도 |
후퇴점으로 가는 모션의 가속도 |
0.1 m/s2 [0.001 ~ 20] |
|
|
모션 시간 |
후퇴점으로 가는 모션의 시간
|
0 s [0 ~ 10000] |
|
|
블렌딩 반경 |
교시점과 후퇴간의 이동을 이어주는 블렌딩 반지름 |
0 mm [0 ~ 1000] |
|
|
강성 제어 설정 (옵션) |
사용 여부 |
강성 제어 사용 여부 선택 |
False [True, False] |
|
강성 |
강성 값 설정 |
x=y=z
rx=ry=rz
|
|
[Door Open Close] 커맨드를 사용하기 위해서는 머신의 문에 외부로 돌출된 손잡이가 있어야 하며, 로봇이 닿을 수 있는 위치에 있어야합니다. 그리고 문을 열고 닫을 때 주변에 장애물이 없어야 합니다.