コモン
-
有効領域は、インテリア/エクステリアのいずれかとして選択できる。
-
シェイプタイプ(Shape Type)は、球(Sphere)、シリンダ(Cylinder)、立方体(Cuboid)、傾斜立方体(Tilted Cuboid)、またはマルチ平面(Multi-plane)ボックス詳細については、「 スペース制限とゾーン設定の概要」を参照してください。.
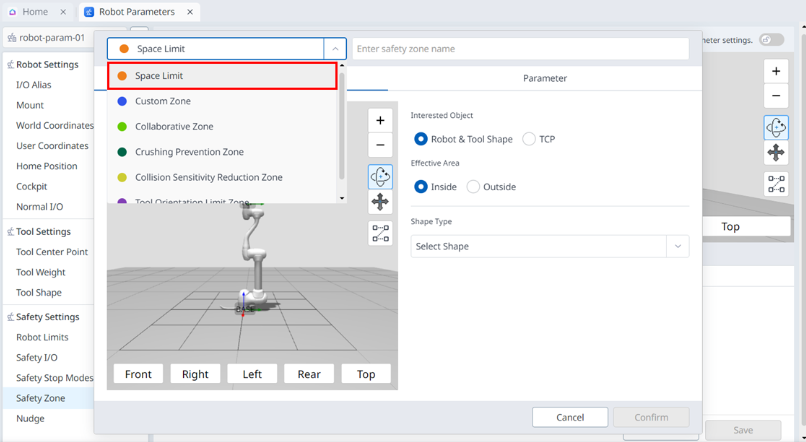
スペース制限の設定
スペースリミットはロボットの一番外側に仮想フェンスを設定する機能である。スペース制限を設けずにロボットを操作することはできるが、安全に使用するためにスペース制限を設定することを推奨する。
ポップアップの左上にある[ロボットパラメーター(Robot Parameters)]>[安全ゾーン(Safety Zone)]>[追加(Add)]で[スペース制限(Space Limit)]を選択すると、これを設定できる。
-
対象のオブジェクトには、ロボット&ツールシェイプ/TCPのいずれかを選択できる。
-
ロボットは、通常設定されるスペース制限領域内になければならない。
注釈
設定方法に応じて、[ スペース拡張(Space Expansion)]のデフォルト値が 存在する。
-
ツール形状設定、検査のために「TCP」を選択した場合、TCPマージン値0mm
-
工具形状設定、検査のために「ロボット&工具形状」を選択した場合、TCPマージン値0mm
-
ツール形状が設定されていない、検査のために'TCP'を選択した場合、TCPマージン値0mm
-
工具形状が設定されていない。検査のために[ロボットおよび工具形状(Robot & Tool Shape)]を選択した場合、TCPマージン値60mm
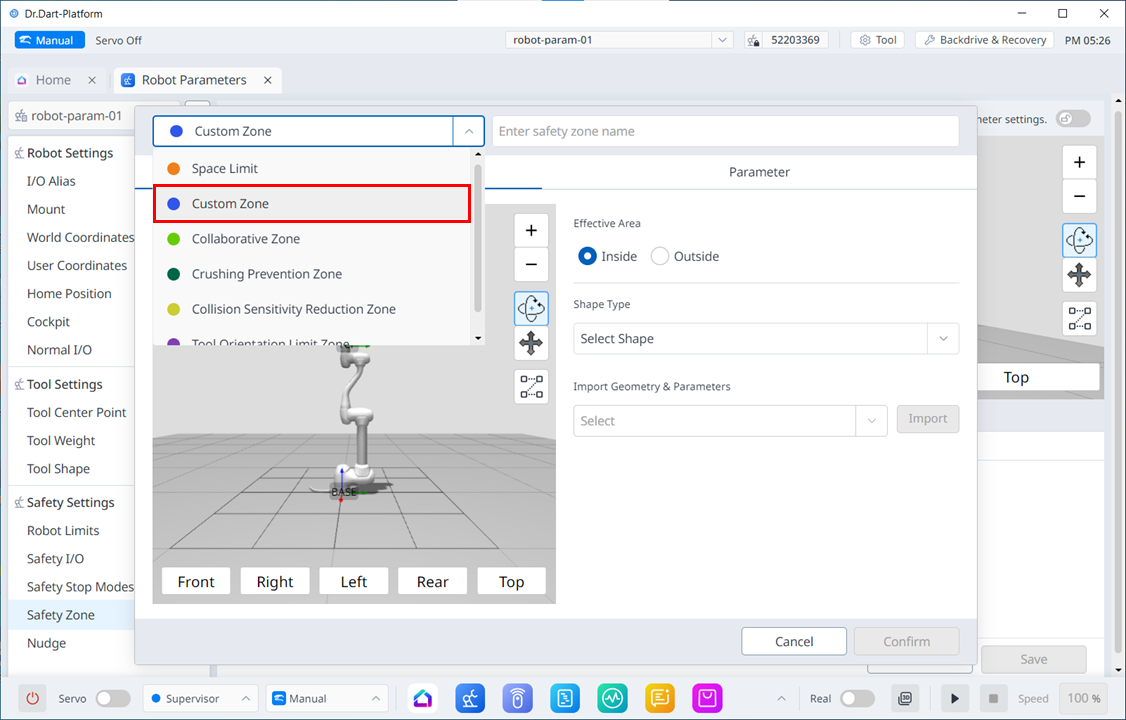
カスタムゾーンを設定する
カスタムゾーンは、安全パラメータを自由に設定できる最も柔軟な安全ゾーン。ロボットの制限、セーフストップモード、ジョイント速度、角度制限など、ニーズに合わせてすべての設定を構成できる。
ロボットパラメータ>安全ゾーン>追加>左上のポップアップで「カスタムゾーン」を選択して設定することができる。
注釈
TCPが複数のエリアが重なっている位置にある場合、以下のルールは各安全機能に個別に適用される。
-
ノーマルモード
-
優先度の高いゾーンにゾーンが設定されていない場合、重なり 合うゾーンの最も制限された安全制限値が検査基準値となる。
-
ハイプライオリティゾーンとしてゾーンセットが1つある場合、そのゾーンの制限値が検査基準値になる。
-
優先度の高いゾーンとして設定されているゾーンが3つ以上ある場合、 ゾーンの最も緩和された安全制限値が検査基準となる。
-
-
縮小モード
-
優先度の高いゾーンにゾーンが設定されていない場合、重なり 合うゾーンの最も制限された安全制限値が検査基準値となる。
-
優先度の高いゾーンに設定されたゾーンが1つある場合、 そのゾーンのオーバーライドオプションによって検査基準値が決定される。
-
オーバーライドオプションが チェックされていない場合、 優先度の高いゾーン と グローバル削減 制限の間の最も制限された安全制限値が検査基準値になる。
-
オーバーライドオプションが チェックされている場合、 優先度の高いゾーンが チェック基準値となる。
-
-
優先度の高いゾーンに設定されたゾーンが複数ある場合は、 そのゾーンのオーバーライドオプションによって検査基準値が決定される。
-
優先度の高いゾーンでオーバーライドオプションがチェックされていない場合、 オーバーライドオプションが チェックされていない優先度の高いゾーンと、 グローバル削減制限の安全制限値が 検査基準値となる。
-
優先度の高いすべてのゾーンのオーバーライドオプションにチェックが付いている場合、 優先度の高いゾーンの中で最も緩和された安全制限値が 検査基準となる。
-
-
コラボレーションゾーンを設定する
コラボレーションゾーンは、ロボットと安全に動作するように設計されたゾーン。近距離作業に必要な減速率やセーフストップモード設定などのロボット制限を提供する。
ロボットパラメータ>安全ゾーン>追加>ポップアップの左上で'コラボレーションゾーン'を選択して設定することができる。
Unknown Attachment
破砕防止ゾーンの設定
破砕防止ゾーンは、ロボットと他の物体との間で発生する可能性のある破砕の危険を防止するゾーン。このゾーンでは、衝突・外力制限を超えた場合、安全停止モードをRS1(Reflex Stop)に固定し、衝突感度を100%に設定することで、衝突検知時にロボットが外力にできるだけ敏感に反応し、浮動反応により安全に停止するようにする。
設定するには、 Robot Parameters > Safety Zone > Add > Popup’s左上で‘Crushing Prevention Zone’を選択する。
Unknown Attachment
衝突感度低減ゾーンの設定
衝突感度低減ゾーンは、異なる材料やサーフェスを扱う際にロボットの衝突検知感度を調整するゾーン。力と衝突の感度設定を提供する。
ポップアップの[ロボットパラメータ(Robot Parameters)]>[安全ゾーン(Safety Zone)]>[追加(Add)]>[左上(Top Left)]で[衝突感度低減ゾーン(Collision Sensitivity Reduction Zone)]を選択すると、
Unknown Attachment
工具方向の境界ゾーンの設定
工具方向制限ゾーンは、TCPの方向を制限するゾーン。TCPが特定の方向を向いていることを確認し、方向と角度のマージンを定義することで安全でない方向に向いていないことを防止する。
ポップアップの[ロボットパラメータ]>[セーフゾーン]>[追加]>[左上]で[ツール方向制限ゾーン]を選択して設定することができる。
Unknown Attachment