볼트를 조이는 툴입니다.
-
역회전모드를 지원하는 툴인 경우 볼트 제거 작업이 가능합니다.
-
진공 기능이 있는 경우 외부 피더에서 공급되는 볼트를 파지할 수 있습니다.
-
체결 토크 도달 여부를 자동으로 체크하는 툴인 경우 로봇으로 성공 여부를 전기 신호로 전달합니다.
-
Controller / Flange Digital Output 신호로만 구동 가능합니다.
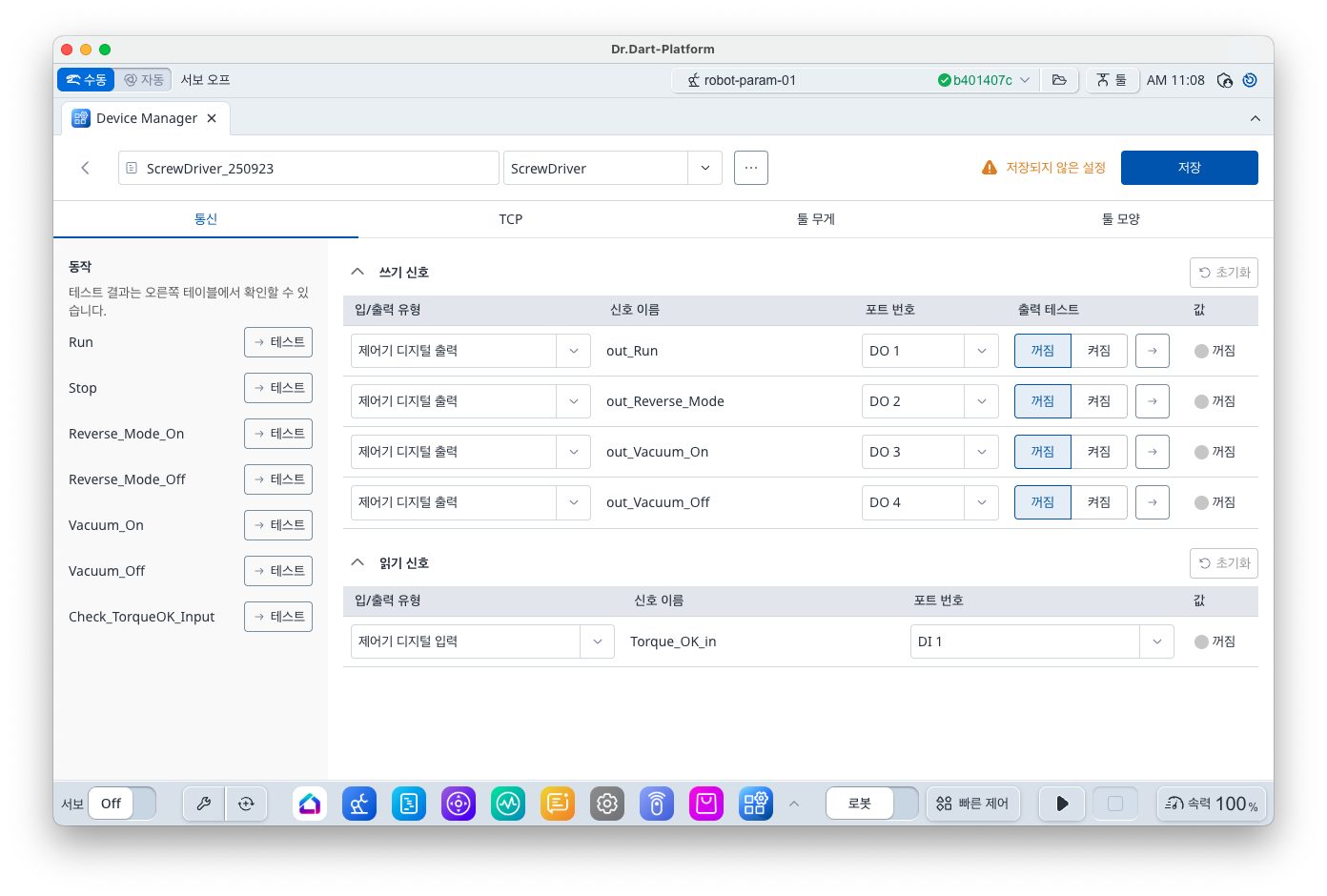
신호 설정
|
항목 |
설명 |
|---|---|
|
out_Run |
Screwdriver 툴을 켜고 끄는 신호를 설정합니다. 신호가 켜진 상태에서 툴이 동작하고 신호가 꺼진 상태에서 툴이 동작을 멈춥니다. |
|
out_Reverse_Mode |
외부 신호를 이용한 역회전모드를 지원하는 툴에 대하여 역회전모드를 설정할 수 있는 신호를 설정합니다. |
|
out_Vacuum_On |
외부 피더에서 나사를 공급받을 때, 나사를 집기 위한 별도 진공 툴을 설치한 경우, 진공을 켜는 신호를 설정합니다. |
|
out_Vacuum_Off |
외부 피더에서 나사를 공급받을 때, 나사를 집기 위한 별도 진공 툴을 설치한 경우, 진공을 끄는 신호를 설정합니다. |
|
Torque_OK_in |
자동 토크 확인 툴인 경우, 체결 토크가 정상적으로 확인된 경우의 입력 신호를 설정합니다. |
지원 동작 (DRL)
|
항목 |
설명 |
|---|---|
|
Run |
[Mandatory Action] out_Run 신호를 On 하여 Tool을 작동 시킵니다. |
|
Stop |
[Mandatory Action] out_Run 신호를 Off 하여 Tool의 작동을 멈춥니다. |
|
Reverse_Mode_On |
out_Reverse_Mode신호를 On 하여 Reverse Mode를 설정합니다. |
|
Reverse_Mode_Off |
out_Reverse_Mode신호를 Off 하여 Reverse Mode를 설정하지 않습니다. |
|
Vacuum_On |
out_Vacuum_On 신호를 On, out_Vacuum_Off 신호를 Off 하여 Vaccum을 동작 시킵니다. |
|
Vacuum_Off |
out_Vacuum_On 신호를 Off, out_Vacuum_Off 신호를 On 하여 Vaccum을 정지 시킵니다. |
|
Check_TorqueOK_Input |
목표 토크값 충족(작업종료)관련 입력 신호를 대기합니다. (Timeout = 10초) |