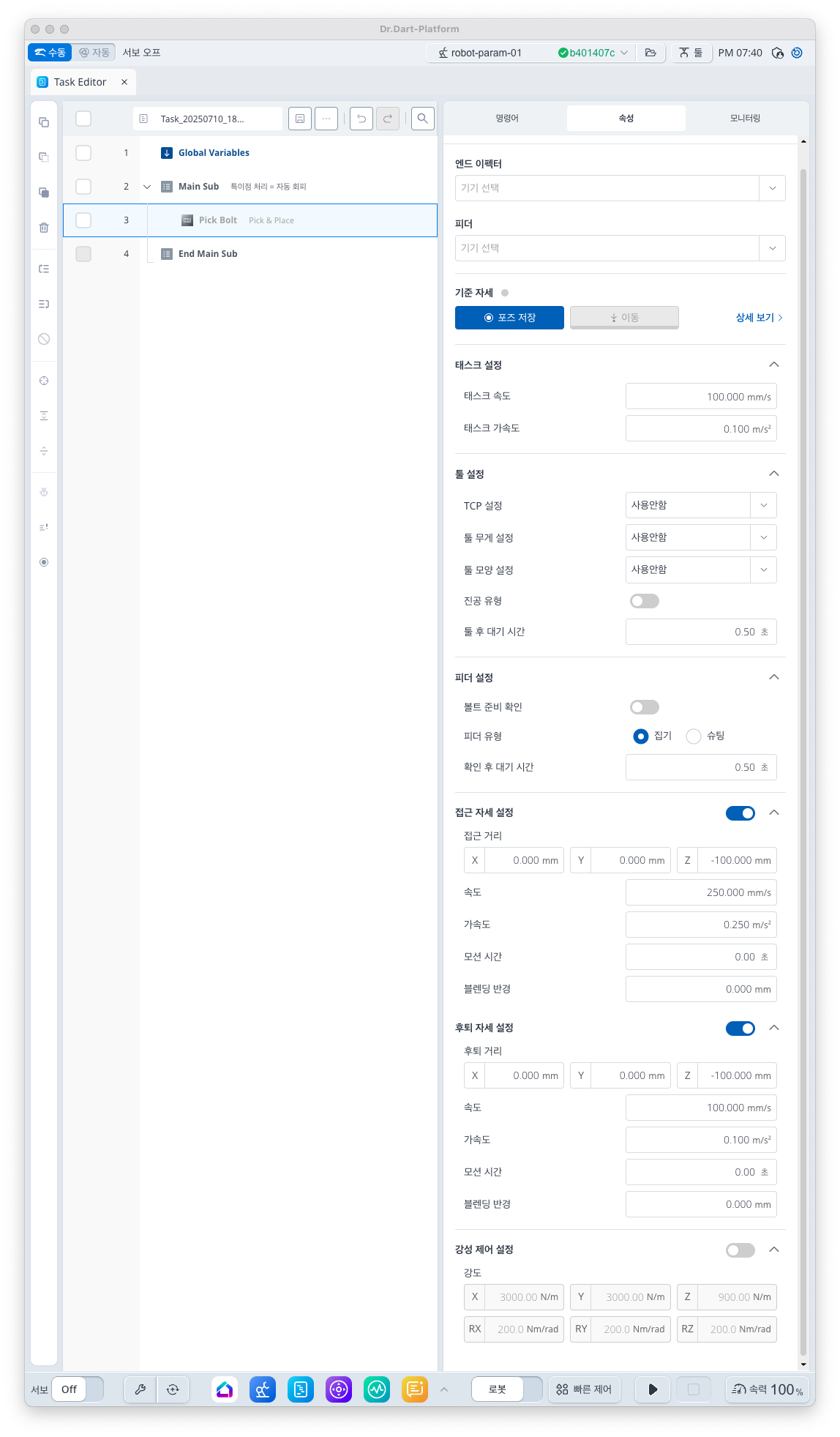
볼트 피더에서 볼트를 특정 위치에 배치 시키면 스크류드라이버(Screwdriver)로 그 볼트를 파지하는 명령어입니다. 스크류드라이버에 진공을 이용한 흡착 기능이 포함된 경우 이를 이용하여 볼트 파지를 안정적으로 할 수 있습니다.
기본 정보
|
항목 |
설명 |
|---|---|
|
추천 디바이스 |
|
|
옵션 기능 |
|
|
명령어 완성 조건 |
|
|
지원 로봇 시리즈 |
E, A, AS, M, H |
기본 동작 순서
[접근 자세] 로 이동 → [기준 자세] 로 이동 → [엔드 이펙터] 동작 ([진공 유형] 설정된 경우 [Vacuum_On] 동작) (일반 ScrewDriver인 경우 별도 동작 없음) → [후퇴 자세] 로 이동
화면 정의
|
항목 |
설명 |
기본값 및 입력 범위 |
|
|---|---|---|---|
|
기본 설정 |
엔드 이펙터 |
그리퍼 선택 시 입출력 테스트 가능 |
|
|
피더 |
볼트피더 선택 시 입출력 테스트 가능 |
|
|
|
기준 자세 |
교시점
|
|
|
|
태스크 설정 |
태스크 속도 |
진입점에서 교시점까지 이동하는 속도 |
100 mm/s [0.001 ~ 8000] |
|
태스크 가속도 |
진입점에서 교시점까지 이동하는 가속도 |
0.1 m/s2 [0.001 ~ 20] |
|
|
툴 설정 |
TCP 설정 (옵션) |
사용할 [TCP] 선택 |
사용안함 [로봇 파라미터에 설정된 TCP 목록] |
|
툴 무게 설정 (옵션) |
작업물을 잡는 경우 해당 무게 정보 반영 |
사용안함 [로봇 파라미터에 설정된 툴 무게 목록] |
|
|
툴 모양 설정 (옵션) |
사용할 [툴 모양] 선택 |
사용안함 [로봇 파라미터에 설정된 툴 모양 목록] |
|
|
진공 유형 (옵션) |
Vaccuum 기능 탑재 여부 선택 |
False [True, False] |
|
|
툴 후 대기 시간 |
[엔드 이펙터] 의 [Run] 동작 후 대기 시간 |
0.5 s [0 ~ 10000] |
|
|
피더 설정 |
볼트 준비 확인 |
볼트 준비 신호 대기 여부 선택 |
False [True, False] |
|
피더 유형 (옵션) |
피더 종류 선택 |
집기 [집기, 슈팅] |
|
|
확인 후 대기 시간 |
볼트 준비 신호 완료 후 대기 시간 |
0.5 s [0 ~ 10000] |
|
|
접근 자세 설정 (옵션) |
사용 여부 |
접근 자세 사용 여부 선택 |
True [True, False] |
|
접근 거리 |
교시점으로부터 x, y, z 방향으로 떨어진 거리 |
[0, 0, -100] mm [-99999.999 ~ 99999.999] |
|
|
속도 |
진입점으로 가는 모션의 속도 |
250 mm/s [0.001 ~ 8000] |
|
|
가속도 |
진입점으로 가는 모션의 가속도 |
0.25 m/s2 [0.001 ~ 20] |
|
|
모션 시간 |
진입점으로 가는 모션의 시간
|
0 s [0 ~ 10000] |
|
|
블렌딩 반경 |
교시점과 후퇴간의 이동을 이어주는 블렌딩 반지름
|
0 mm [0 ~ 1000] |
|
|
후퇴 자세 설정 (옵션) |
사용 여부 |
후퇴 자세 사용 여부 선택 |
True [True, False] |
|
후퇴 거리 |
교시점으로부터 x, y, z 방향으로 떨어진 거리 |
[0, 0, -100] mm [-99999.999 ~ 99999.999] |
|
|
속도 |
후퇴점으로 가는 모션의 속도 |
100 mm/s [0.001 ~ 8000] |
|
|
가속도 |
후퇴점으로 가는 모션의 가속도 |
0.1 m/s2 [0.001 ~ 20] |
|
|
모션 시간 |
후퇴점으로 가는 모션의 시간
|
0 s [0 ~ 10000] |
|
|
블렌딩 반경 |
교시점과 후퇴간의 이동을 이어주는 블렌딩 반지름 |
0 mm [0 ~ 1000] |
|
|
강성 제어 설정 (옵션) |
사용 여부 |
강성 제어 사용 여부 선택 |
False [True, False] |
|
강성 |
강성 값 설정 |
x=y=z
rx=ry=rz
|
|