注意
-
斗山ロボティクスは、吊り上げ装置の使用中に発生したいかなる損害についても責任を負わない。
-
ロボットを梱包材で梱包して輸送する場合は、乾燥した場所に保管する。ロボットを高湿度の場所に保管すると結露が発生し、ロボットが
-
ロボットを移動する場合は、重量を考慮し、ロボットのリンクとベースを適切な人数で保持する。
-
コントローラを移動するときは、ボックスの側面にあるハンドルを保持する。
-
ロボットやコントローラーを搬送する際は、姿勢を適切に保つこと。これを怠ると、背中の怪我やその他の身体的損傷につながる可能性がある。
-
リフティング装置を使用してロボットを輸送する場合は、関連するすべての国および地域の規制を遵守すること。
-
斗山ロボティクスは、輸送中に発生したいかなる損害や損失についても責任を負わないため、取扱説明書に従って安全にロボットを輸送することを確認する。
クイックガイド
この斗山ロボティクス製品を選んでくれてありがとう。
本ガイドでは、Hシリーズロボットを安全に移動および設置するための3つの処理方法に必要な最小限の情報を提供する。ロボットを取り扱う際は、必ず本ガイドの指示に従うこと。
-
ロボットを再配置する必要がある場合は、最初の納入時に提供された梱包材を必ず使用すること。この目的のために、包装材料および詰め物を乾燥した涼しい場所に保管する。
-
産業用ロボットは、「労働安全衛生基準書」の規則および安全検査で定められた検査基準を十分に考慮して設置すること(検査対象の場合)。
-
クレーン、リフト、ハンドリフトでの運搬が可能であり、クレーンを使用してロボットを持ち上げる場合は、必ず管轄地域または国の規制を遵守すること。
-
ロボットの設置と再配置には、梱包姿勢を利用する。
-
すべての標準コンポーネントと追加(オプション)コンポーネントが含まれているかどうかを確認し、問題がある場合は販売代理店に連絡する。
-
梱包材とボルトは、ロボットの再配置のために特別に設計されている。ロボットの移動以外の用途には使用しないこと。
-
ロボットを移動するときは、ロボットの外部に力を加えないこと。これらの指示に従わないと、怪我をするおそれがある。
-
取り付け後、梱包材とボルトを取り外す。ロボットを移動する必要がある場合に備えて、梱包材とボルトを保管すること。
-
再配置する前に、ボルトと梱包材がしっかりと固定されていることを確認する。
-
1.クレーン(ホイスト)を使用する場合
-
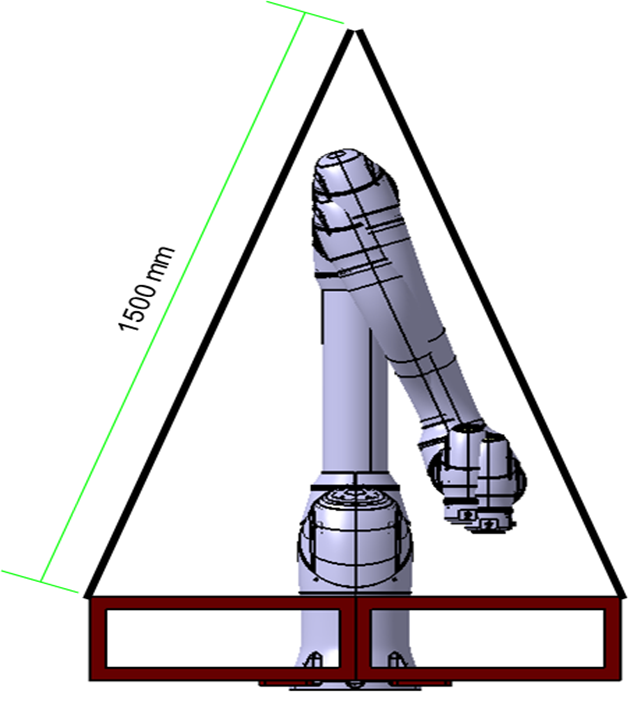
ロボットの重量を扱うことができる耐スピンケーブルを使用する。
-
ワイヤロープは少なくとも1500mmの長さでなければならない。
|
項目s |
最小容量 |
|---|---|
|
クレイン |
1000kg |
|
ワイヤロープ(EA) |
1000kg |
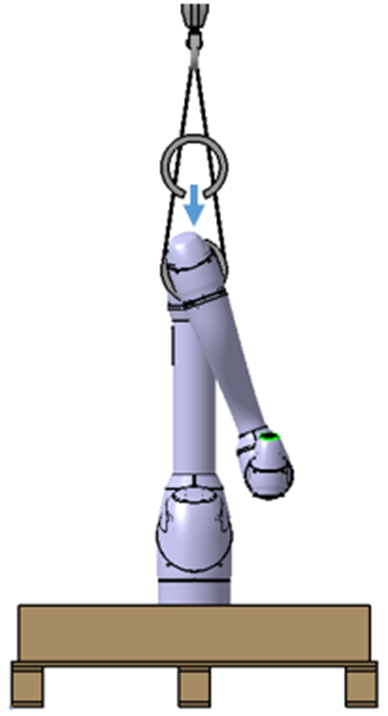
1.1ロープをロボットフレームに固定する場合
-
作業の前に、軸3と軸4の間に用意されているラバージグを取り付ける。(下の図を参照)(下の図を参照)
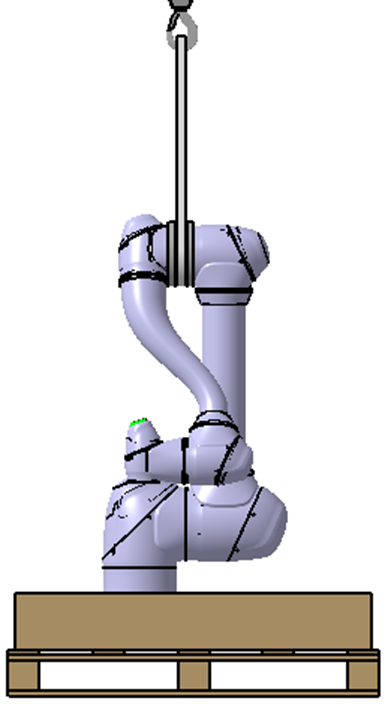
1.2ロープが底部の梱包材に固定されている場合
警告
-
ロボットを持ち上げると、姿勢やオプションのアタッチメントに応じて傾くことがある
-
持ち上げるときはロボット本体の下を歩かないこと。
-
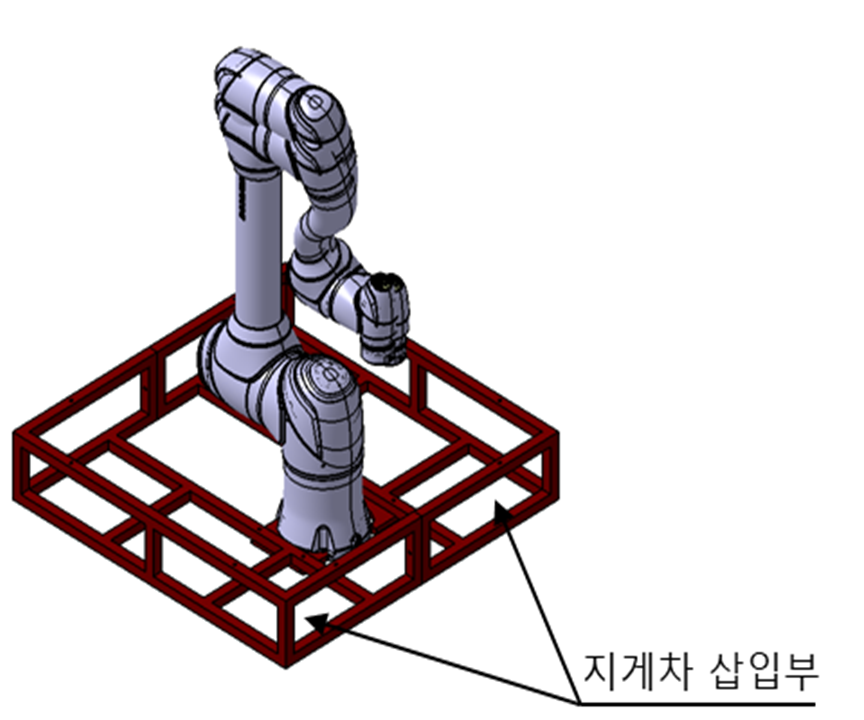
フォークリフトを使用する場合
-
ロボットをパッケージ状態で再配置する必要がある場合は、フォークリフトを使用してパッケージの底からロボットを持ち上げる。
-
設置中は、ロボットへの損傷を避けるために注意しながら、下部梱包材を使用してロボットを移動する。
-
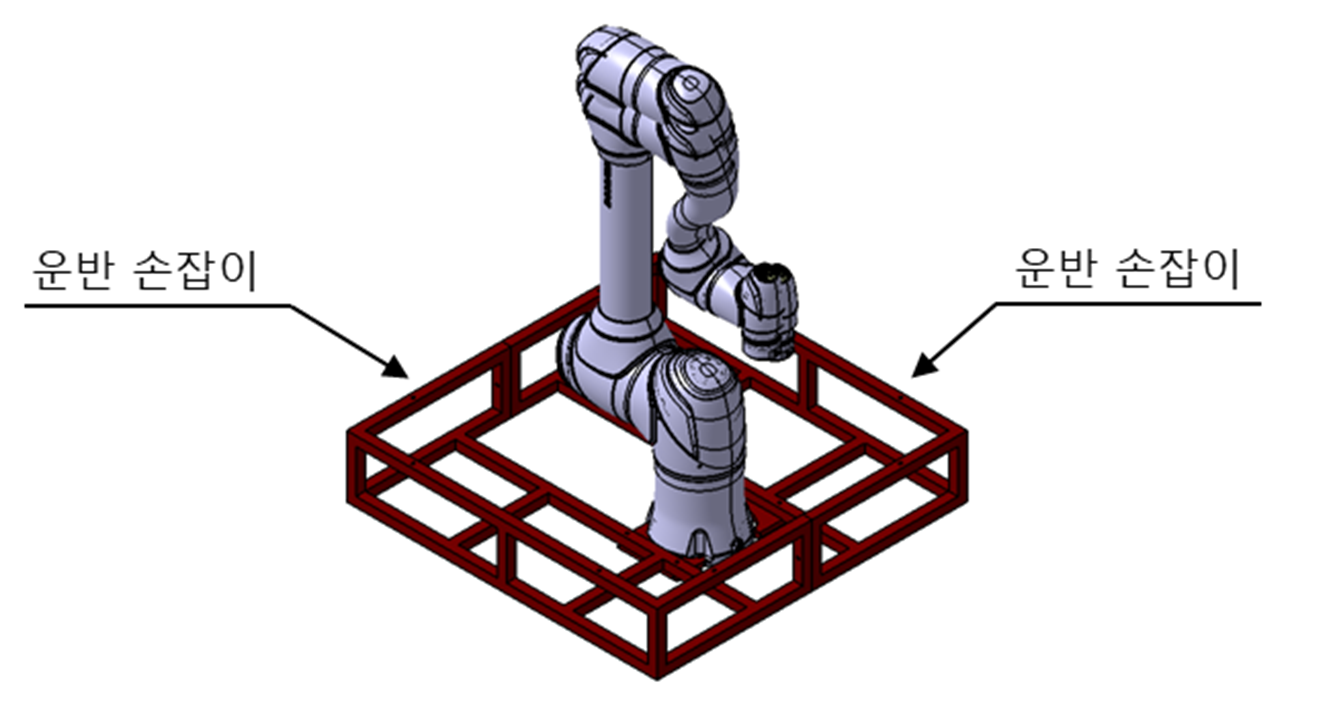
吊り上げ装置が使用できない場合
-
リフティング装置が利用できないためにロボットを移動する必要がある場合は、地域および国の輸送作業基準に準拠してロボットを移動する。
-
取っ手には、下の梱包材を使用することを推奨する。
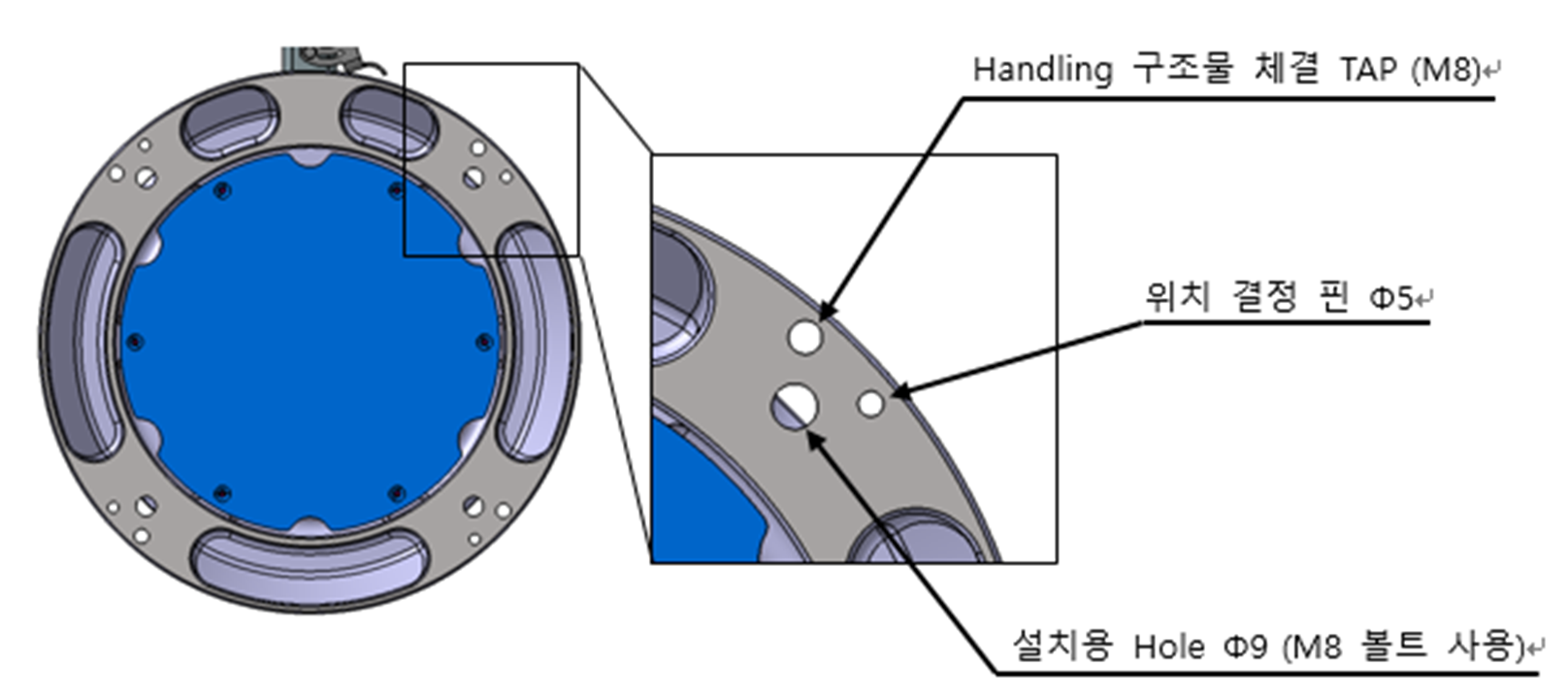
注釈
Hシリーズの場合は、作業が容易に行えるように、作業台に4本のM8タップを塗布しているので、作業時に使用してほしい。