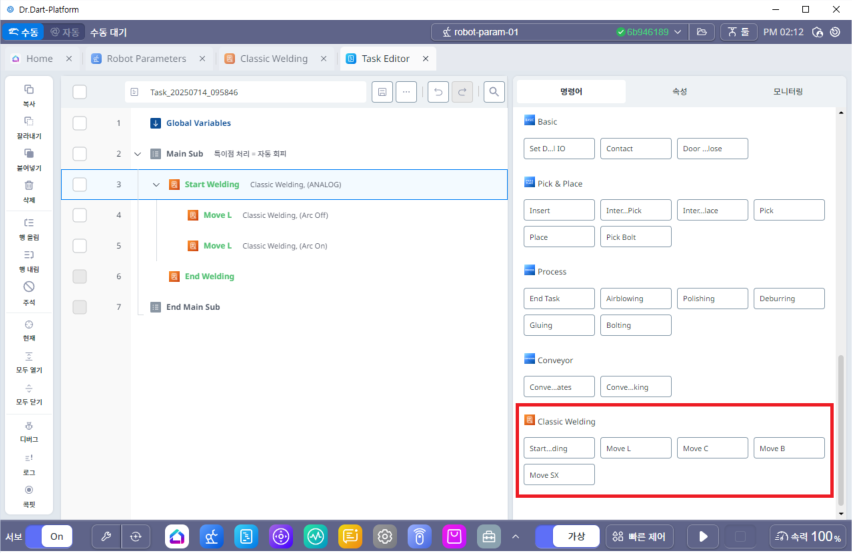
용접 에서 사용되는 명령어는 총 5개 이며 로봇 모션과 관련된 명령어가 아래 그림과 같이 따로 존재 합니다.
1. 용접 명령어 리스트
|
번호 |
항목 |
설명 |
|---|---|---|
|
1 |
Start Welding / End Welding |
Task List에 Start Welding – End Welding으로 구성되는 Block을 생성합니다. |
|
2 |
Move L |
Task List에 Start Welding – End Welding으로 구성되는 Block을 생성합니다. 해당 Block에는 접근위치 이동(Approach), 용접시작점 이동(Arc Start), 용접모션(Arc End), 후퇴위치 이동(Retract) 명령을 수행하기 위한 Motion 명령어가 포함됩니다. Arc Start - Arc End간 용접경로 모션은 MoveL로 추가됩니다. |
|
3 |
Move C |
Task List에 Start Welding – End Welding으로 구성되는 Block을 생성합니다. 해당 Block에는 접근위치 이동(Approach), 용접시작점 이동(Arc Start), 용접모션(Arc End), 후퇴위치 이동(Retract) 명령을 수행하기 위한 Motion 명령어가 포함됩니다. Arc Start - Arc End간 용접경로 모션은 MoveC로 추가됩니다. |
|
4 |
Move B |
Task List에 Start Welding – End Welding으로 구성되는 Block을 생성합니다. 해당 Block에는 접근위치 이동(Approach), 용접시작점 이동(Arc Start), 용접모션(Arc End), 후퇴위치 이동(Retract) 명령을 수행하기 위한 Motion 명령어가 포함됩니다. Arc Start - Arc End간 용접경로 모션은 MoveB로 추가됩니다. |
|
5 |
Move SX |
Task List에 Start Welding – End Welding으로 구성되는 Block을 생성합니다. 해당 Block에는 접근위치 이동(Approach), 용접시작점 이동(Arc Start), 용접모션(Arc End), 후퇴위치 이동(Retract) 명령을 수행하기 위한 Motion 명령어가 포함됩니다. Arc Start - Arc End간 용접경로 모션은 태스크 스플라인 모션(MoveSX)으로 추가됩니다. |
-
명령어를 선택하면 태스크 리스트(Task List)에 Start Welding과 End Welding로 구성되는 용접 구역(Welding Block)이 생성됩니다.
-
용접 구역 내에 모션 명령어를 추가하여 모션 중 용접 기능과 연동할 수 있습니다. Start Welding 태스크 라인을 눌러 속성(Property) 탭에서 태스크 설정을 시작합니다.
주의
용접시 사용하는 로봇 모션 명령어는 용접 에서 제공하는 모션 명령어를 사용 해야 합니다. 기본적으로 제공되는 모션 명령어는 용접 에서 사용이 불가 하며 오동작을 할 수 있습니다.
2. 용접 명령어(Start Welding) 속성
|
번호 |
항목 |
설명 |
|---|---|---|
|
1 |
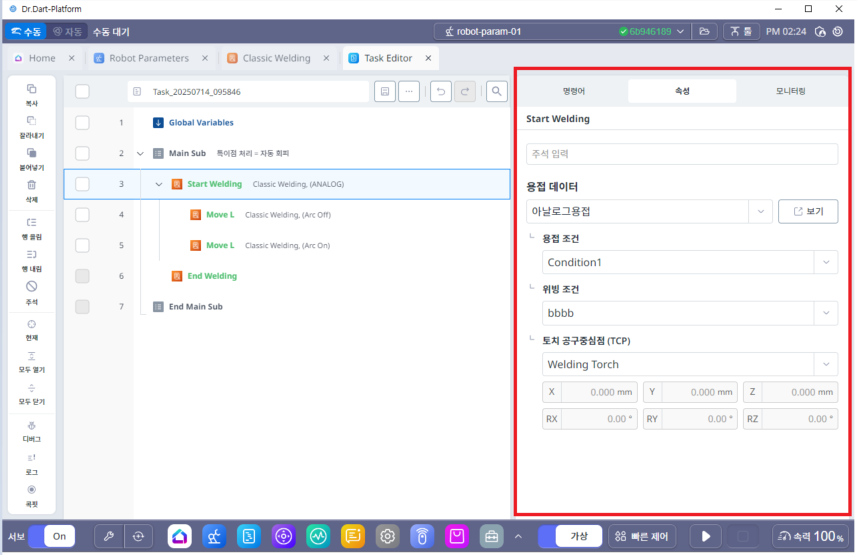
용접 데이터 |
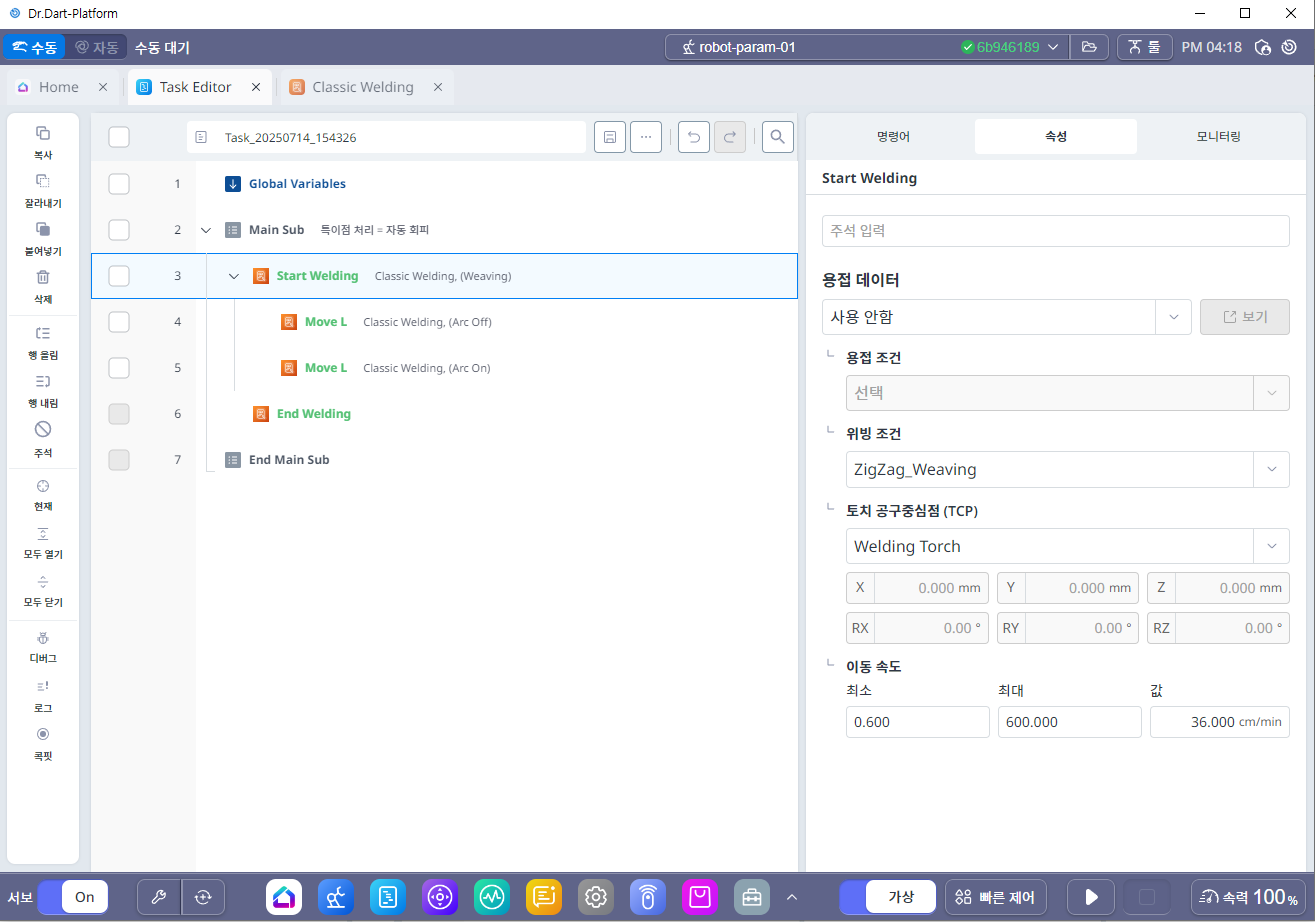
Task 에서 사용 하고자 하는 용접기를 선택합니다. 용접기 목록은 용접 모듈에서 설정한 Analog 또는 Digital 용접 설정 목록이 나타 납니다. 또한 용접기를 선택하지 않을 경우 Weaving 모션 Task 를 설정 할 수 있습니다. 이때, 아래와 같이 이동 속도를 반드시 설정 해야 합니다. 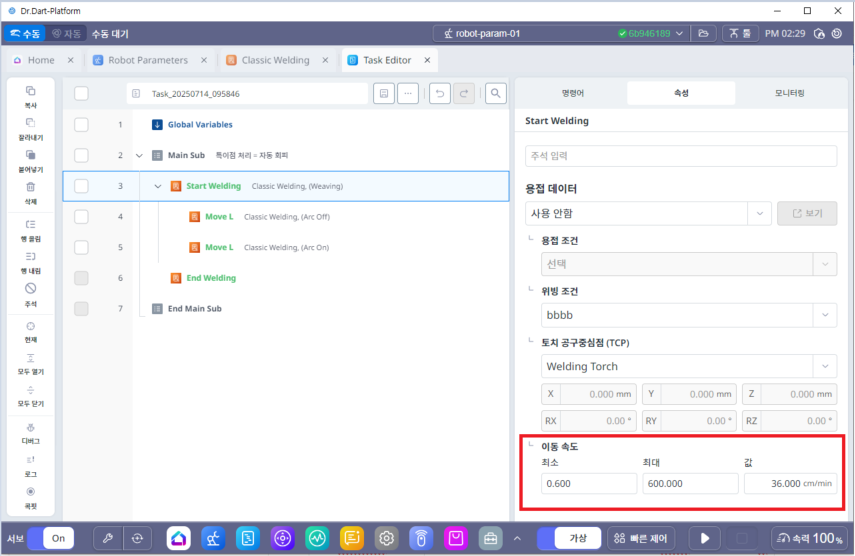
|
|
2 |
용접 조건 |
용접 데이터를 선택 한 뒤, 선택한 용접 데이터에서 설정 한 용접 조건에 대한 리스트가 보이며, 이 중 한 개를 선택 합니다. |
|
3 |
위빙 조건 |
위빙 조건 목록 중 사용할 조건을 선택합니다. 위빙 조건이 필요 없는 경우는 Not Used를 선택할 수 있습니다. 다만, 경로 오프셋을 사용하고자 하는 경우 위빙 조건을 선택하여야 기능을 사용할 수 있습니다. |
|
4 |
토치 공구중심점(TCP) |
로봇 끝단에 장착된 용접 토치를 선택합니다. 잘못된 토치를 선택하는 경우 용접경로가 예상과 다르게 생성될 수 있으니 주의하십시오. 용접 토치의 경우 Robot Parameter 모듈에 TCP 가 등록되어 있어야 목록에 보입니다. |
참고
-
위빙 모션은 사용하지 않으나 오프셋만 사용하고자 하는 경우 사다리꼴 프로파일의 P1, P2를 모두 (0,0)으로, 위빙 시간/휴지 시간을 모두 0으로 설정하면 오프셋 기능만 사용할 수 있습니다.
-
용접기와의 인터페이스 및 용접조건 적용은 하지 않거나 태스크프로그램에 별도로 작성하여 용접기와 연동하며 위빙기능만 사용하고자 하는 경우에는 워크셀매니져에서 용접기를 활성화 시키지 않은 상태에서 (용접 데이터 “사용 안함” 상태임을 확인) 위빙 조건을 지정하여 수행할 수 있습니다.
3. 용접 모션 명령어 및 구간 별 작업 조건 지정
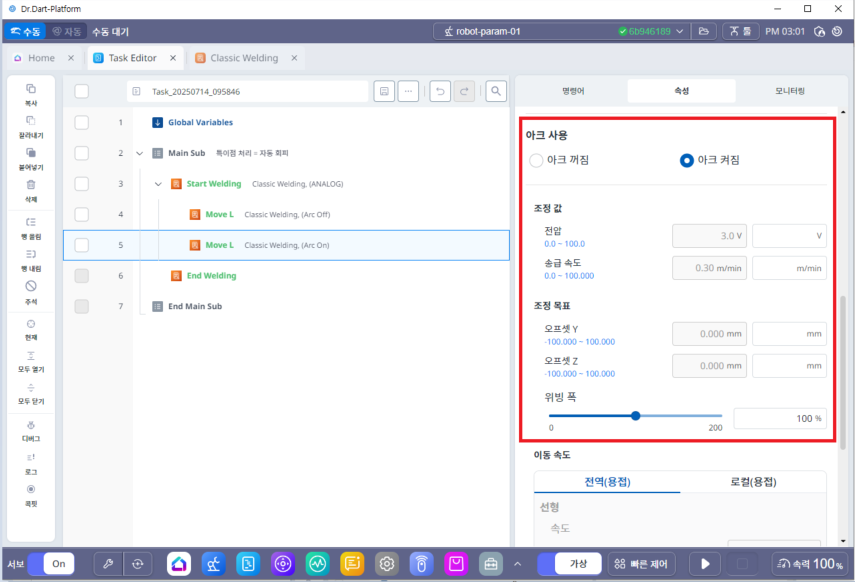
용접 태스크를 위한 교시는 일반적인 교시와 동일합니다. MoveL, MoveC, MoveB 및 MoveSX 모션 명령어를 용접기능과 연동하여 사용할 수 있습니다. 용접구역 내에 모션명령어를 추가하는 경우, “아크 사용” 란에 “아크켜짐” ,“아크꺼짐” 선택 란이 존재 합니다. “아크 켜짐” 활성화 시 모션 중 용접이 수행되며, “아크 꺼짐” 시에 용접 기능과 연동되지 않고 일반적인 모션을 수행합니다.
용접 블록 내에서 여러 개의 모션을 입력한 경우 “아크 켜짐” 으로 선택된 모션은 각 모션 별로 용접조건을 변경할 수 있습니다. 다만, 하나의 용접 블록 내에서는 하나의 용접/위빙/토치정보만 유효하며 저장 가능하므로 조건을 변경한 모션구간 수행 중에는 별도 지정한 용접/위빙조건은 적용되나 용접 모니터링 에서 실시간으로 조건을 조정할 수 없습니다.
|
번호 |
항목 |
설명 |
|
|---|---|---|---|
|
1 |
아크 사용 |
해당 명령어를 용접 모션으로 사용할지 여부를 선택합니다. |
|
|
2 |
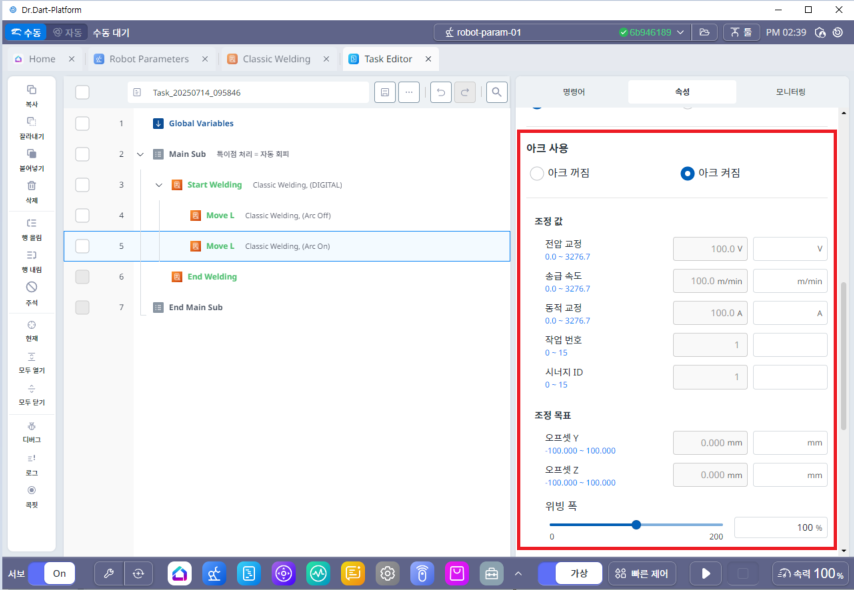
조정 값 |
조정 값 |
선택한 용접 조건의 항목 값들을 변경할 수 있습니다. |
|
조정 목표 |
선택한 위빙 조건의 항목 값들을 변경할 수 있습니다. |
||
|
3 |
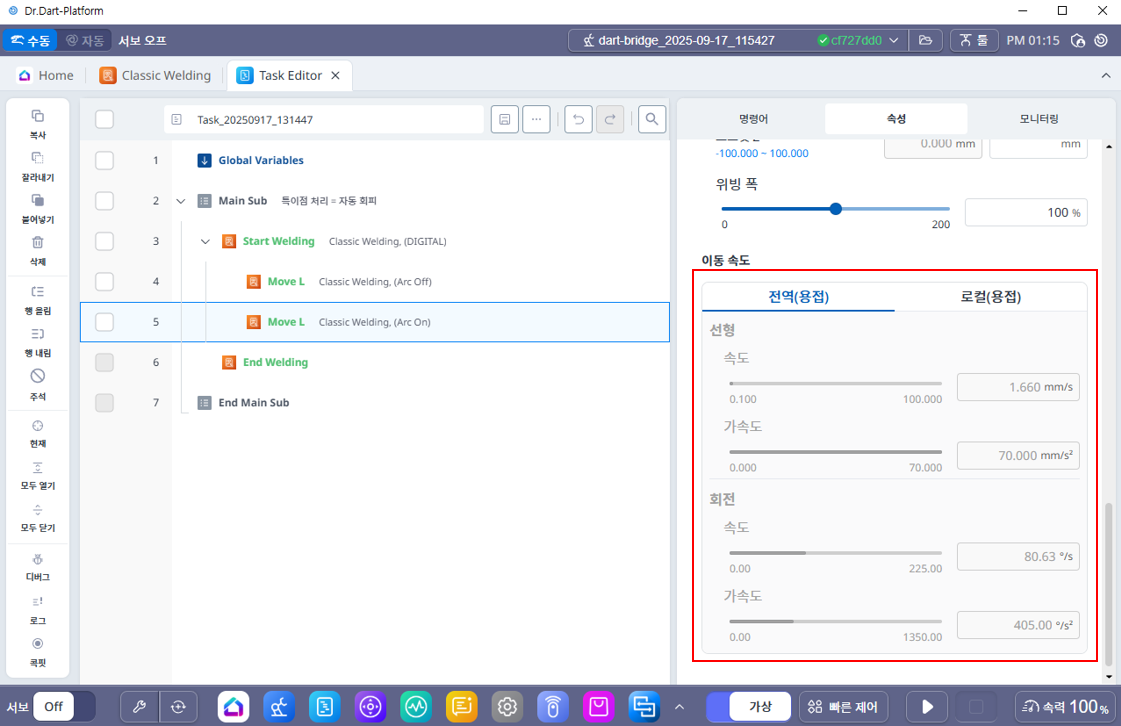
이동 속도 |
용접 속도를 변경하고자 하는 경우 지역(Local) 탭을 선택하여 변경할 속도를 입력하십시오. 단위는 mm/sec입니다. 가속도 및 회전속도/가속도 설정은 전역(Global) 및 지역(Local) 탭에서 모두 변경 가능합니다. |
|
4. 위빙 기능만 사용
용접기 인터페이스 및 용접 조건을 설정하지 않고 사용자 프로그램으로 용접기와 인터페이스를 구축하여 위빙 기능만 활용하는 것이 가능합니다.
StartWelding 명령어에서 용접기를 선택 하지 않으면(“사용 안함” 선택) 사용하고자 하는 위빙 조건만 추가한 후 Task Editor에서 용접 명령을 활용하면 위빙 모션만 사용이 가능합니다.