Unknown Attachment
メニュー
|
項目s |
概要 |
|
|---|---|---|
|
1 |
編集コマンドツール(CTR) |
|
|
2 |
タスクリスト |
タスクの順序と、[コマンド(Command)]タブから追加されたコマンドのリストを表示する。タスクが作成されると、 グローバル変数、メインサブ、およびメインサブの終了 コマンドが自動的に追加される。 このリストには、次の関数が含まれる。
|
|
3 |
コマンド |
タスクリストに追加するコマンドのリストを表示する。コマンドが選択されると、タスクリストに追加される。 |
|
4 |
特性 |
このセクションでは、タスクリストに追加されたコマンドの設定を表示および変更できる。 |
|
5 |
モニタリング |
このセクションでは、タスクリストに追加されたコマンドをシミュレートし、さらに設定することができる。 |
View Moreは次のように構成されている。
メニュー
|
項目s |
概要 |
|
|---|---|---|
|
1 |
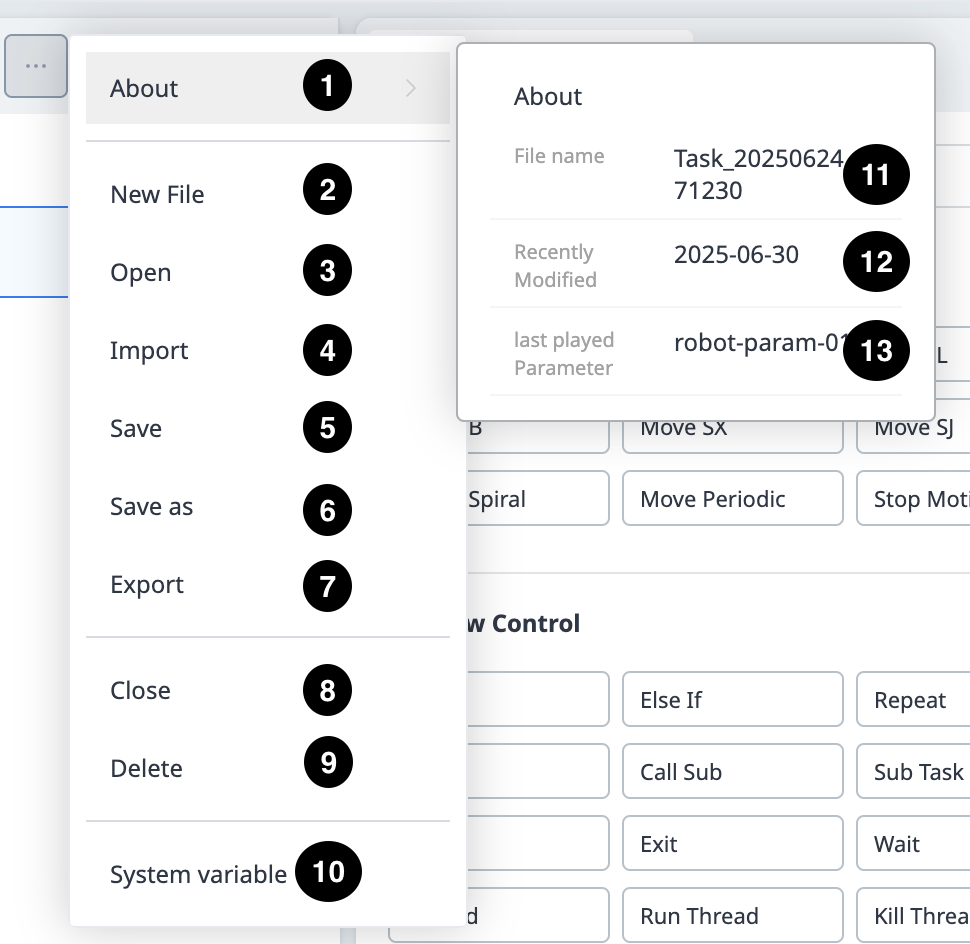
概要 |
タスクの詳細については、を参照。 |
|
2 |
新規ファイル |
新しいファイルを作成する。 |
|
3 |
開く |
すでに存在するタスクを開く。 |
|
4 |
インポート |
外部ソースからタスクファイルをインポートする。 |
|
5 |
保存 |
現在のタスクを保存する。 |
|
6 |
名前を付けて保存 |
現在のタスクを別の名前で保存する |
|
7 |
エクスポート |
現在のタスクをエクスポートする。 |
|
8 |
閉じる |
タスクを閉じる。 |
|
9 |
削除 |
タスクを削除できる。 |
|
10 |
システム変数 |
システム変数を設定する。 ロボットの位置、速度、状態などのシステム変数をプログラム内で宣言して使用できる。これらの変数は
変数をドラッグすることで、変数の順序を変更できる。 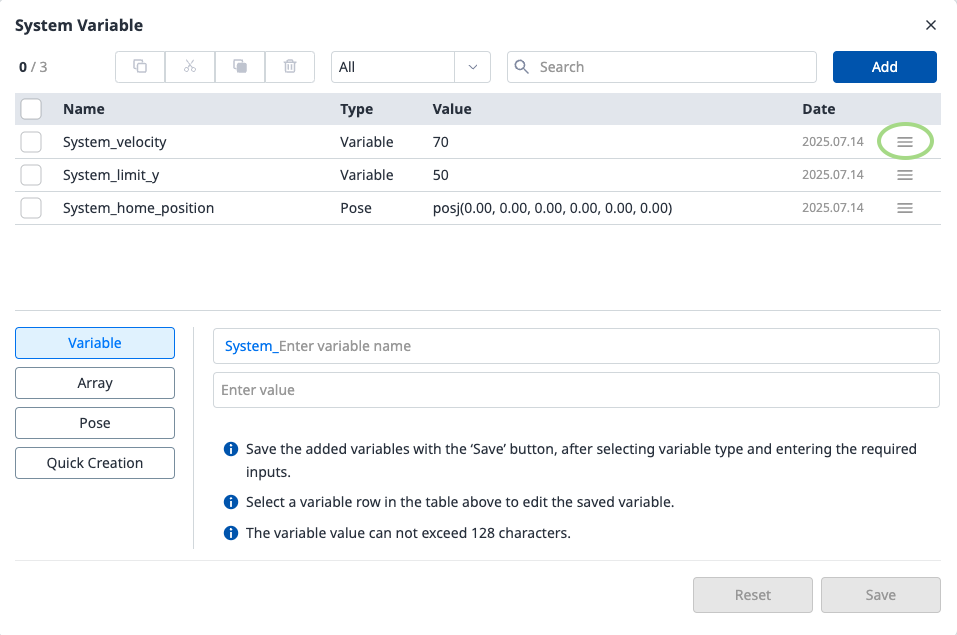
テーブルの列ヘッダー(名前、日付)をクリックすると、ソート順を変更できる。 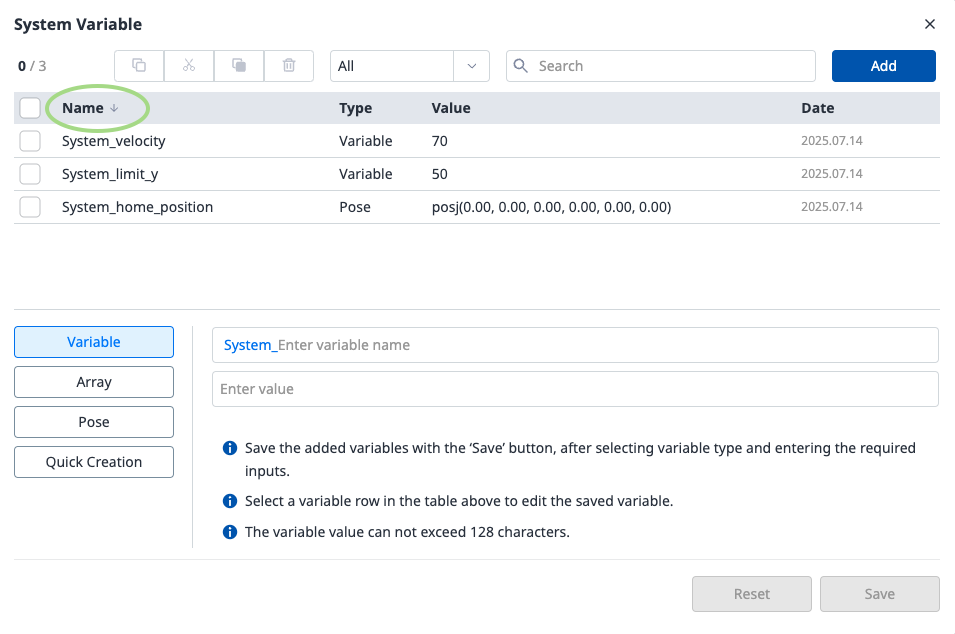
|
|
11 |
ファイル名について(_F) |
ファイル名はここに表示される。 |
|
12 |
最近変更されたバージョン情報(_R) |
ここで最後の変更の日付が表示される。 |
|
13 |
About_Last Playedパラメータ |
ここで最後に実行されたパラメータが見られる。 |
注釈
-
グローバル変数: タスクプログラムのグローバル変数とグローバルポーズは、 グローバル変数のプロパティタブで入力でき、タスクリストに追加されたコマンドのプロパティ画面では、定義済みのグローバル変数とグローバルポーズを使用できる。
-
メインサブ、 エンドメインサブ:選択したコマンドはMain Subの下部に追加され、Main Subの下部にリストされているコマンドからEnd Main Subの上部にリストされているコマンドまで、上から下に実行される。
-
Variableタブに変数を登録して監視を行うと、値の変更頻度が速すぎて画面に値を表示できない場合がある。
-
システム変数はソフトウェアバージョンV2.8以降の数に制限なく登録できる。
-
登録されているシステム変数が多すぎると、タスクの実行に時間がかかる可能性がある。
-
ループ内でTP_LOGまたはSETコマンドを過度に使用すると、CPUの過負荷が発生する可能性がある。