모니터링 창은 제어기의 현재 제어 상태를 표 형태로 보여줍니다.
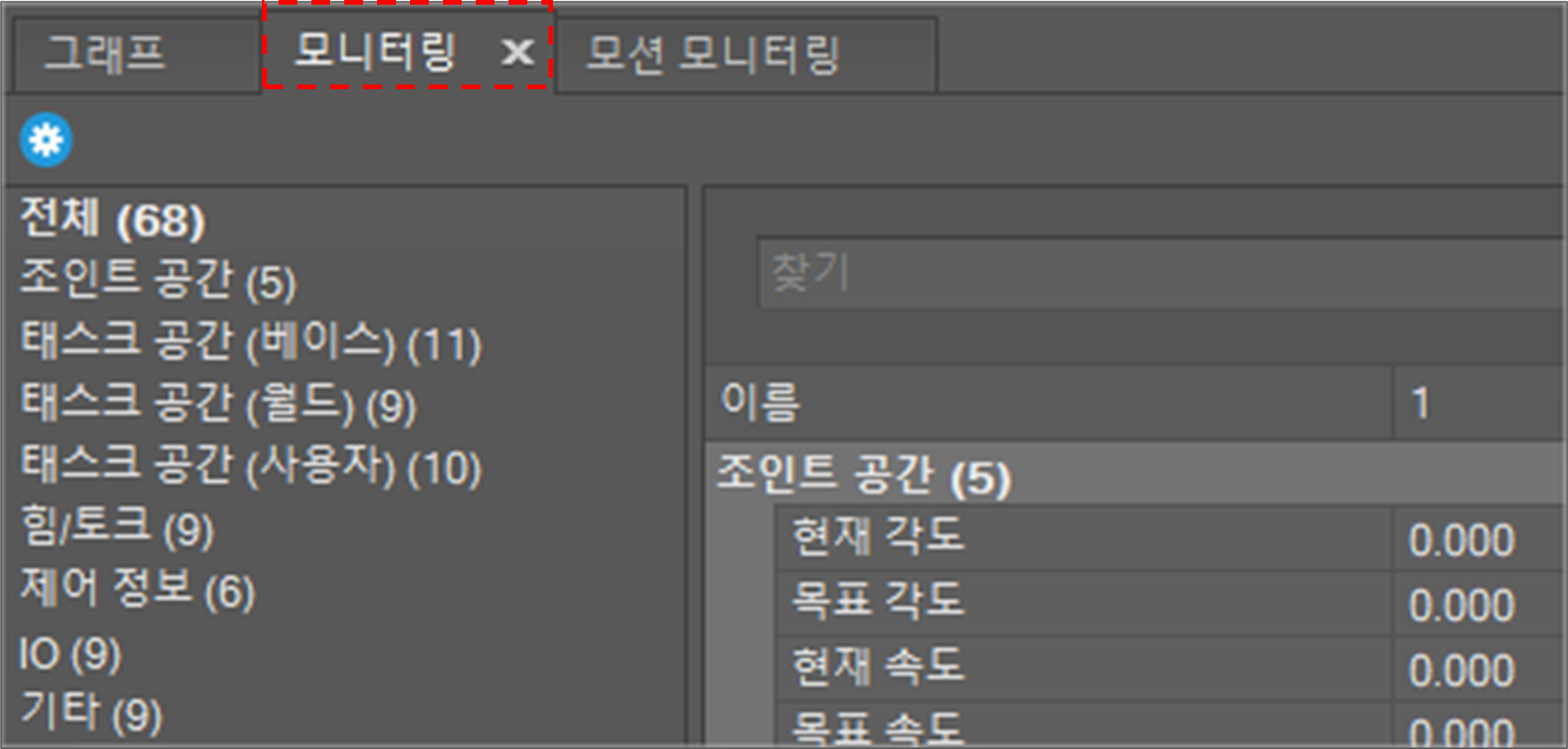
각 행에는 모니터링 항목이 표시되며 각 행의 열 크기는 각 모니터링 항목에 따라 다릅니다. 예를 들어, 조인트 축 1에서 6까지의 값을 표시하려면 '관절 각도'에 6 개의 열이 필요하고 포트 1에서 20까지의 상태를 표시하려면 ‘컨트롤러 디지털’ 입력에 20 개의 열이 필요합니다.
대부분의 상태 값은 100 밀리 초마다 업데이트됩니다. IO 상태의 경우 값이 변경되면 값이 업데이트됩니다.
상태 정보는 아래 표와 같습니다.
|
조인트 공간 |
|
|
태스크 공간 (베이스) |
|
|
태스크 공간 (월드) |
|
|
태스크 공간 (사용자) |
|
|
힘/토크 |
|
|
제어 정보 |
|
|
IO |
|
|
기타 |
|