[컨베이어 좌표계] 패널에서는, [카운트/거리] 와 [컨베이어 좌표계] 를 설정합니다. 즉, Conveyor가 이동할 때 Encoder Count가 얼마나 증가하는지를 나타내는 환산값과 Conveyor가 공간 상에 어떤 위치에 고정되어 있는지를 구하는 것입니다.
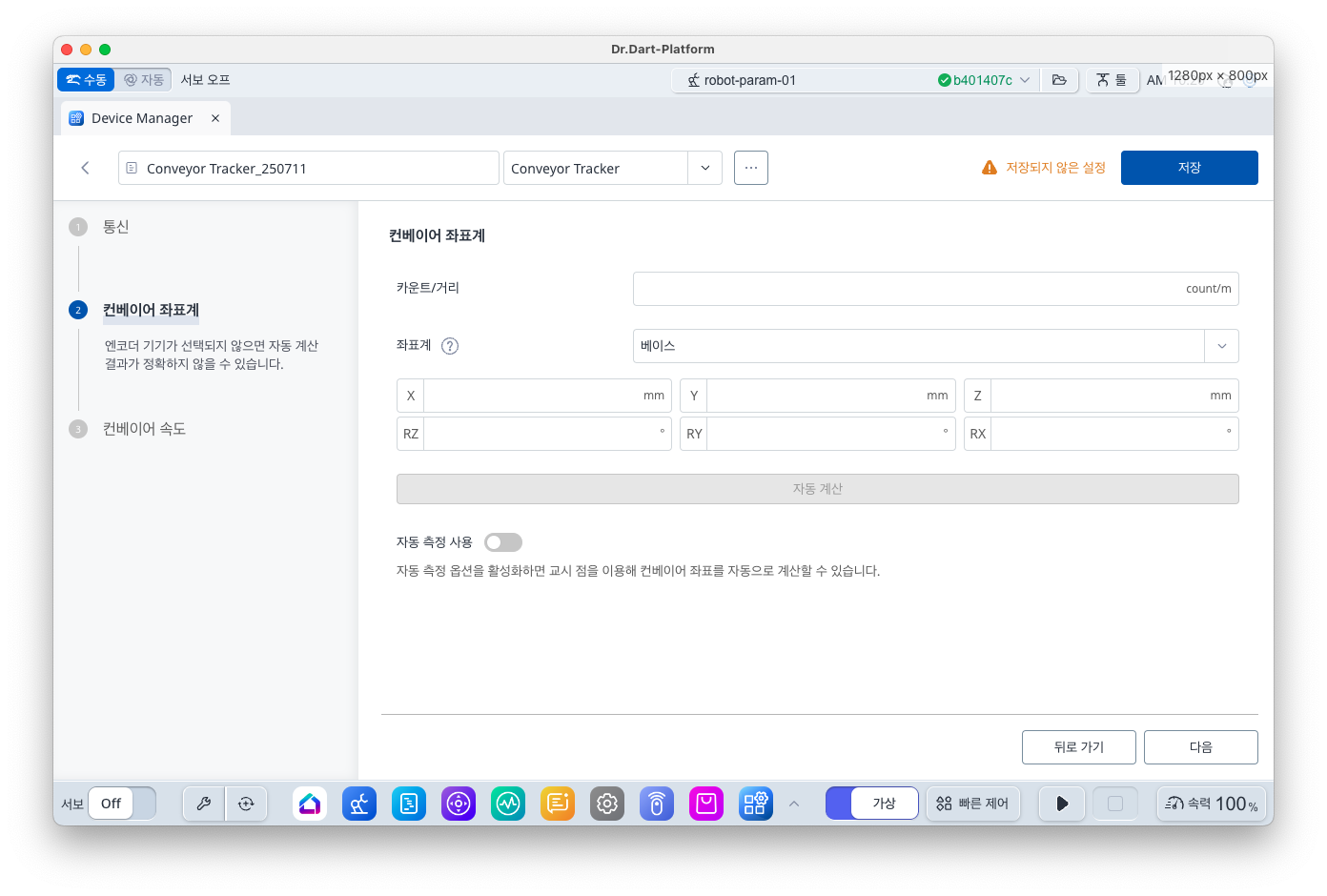
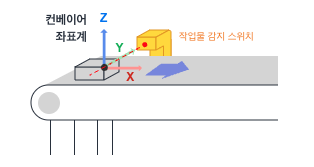
여기서, [컨베이어 좌표계] 의 x축은 기준 좌표계(Base or World) 대비 Conveyor가 흘러가는 방향을 나타냅니다.
이 값들을 구하는 방법은 [점 교시] 를 통해 로봇으로 티칭 후 [자동 계산] 하는 방법과 시스템 설계 사양으로부터 Manual 계산을 하는 방법이 있습니다. 작업물에 로봇으로 티칭을 하기 용이하지 않은 경우 Manual 계산을 할 수도 있지만, 일반적으로는 [자동 계산] 를 권장합니다.
자동 계산
교시는 작업물을 작업물 감지 스위치 이전에 올려놓고, 컨베이어를 진행시켜서 중간 중간 컨베이어를 멈춰서 작업물에 로봇으로 교시하여 위치 정보를 얻는 과정으로 이루어져 있습니다. 교시 전에 프로그램에서 사용할 TCP를 동일하게 설정했는지 확인합니다.

교시할 때 기준 좌표계는 [베이스] 와 [월드] 좌표계 두 가지를 선택할 수 있습니다. 월드 좌표계는 두 대의 로봇이 하나의 컨베이어를 공유할 때 재교시 없이 설정하기 유용합니다.
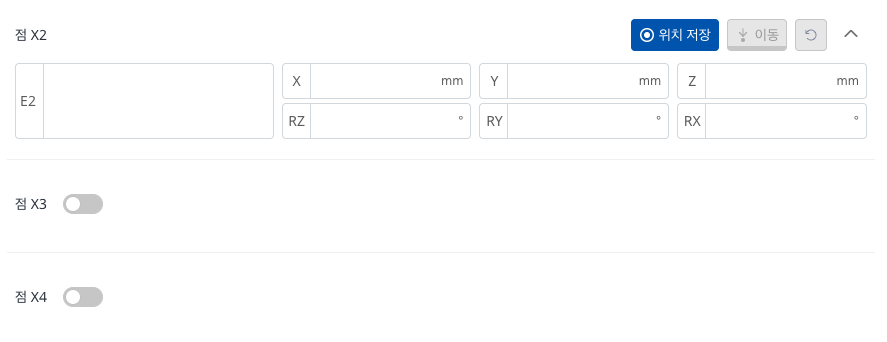
Conveyor 위에 작업물을 실제 작업 상황과 동일하게 작업물 감지 스위치 이전에 놓습니다. 그리고 Conveyor를 작동시켜서 작업물이 Conveyor 의 Triggering Switch를 지난 다음 Conveyor를 정지 시킵니다. 그 상태에서 작업물의 기준점을 로봇으로 티칭하고 [점 X1] 의 포즈 저장을 눌러서 현재 엔코더 카운트와 로봇 위치를 획득합니다.

다음에 Conveyor를 다시 작동시켰다가 멈춰서 [점 X2] 의 위치를 같은 방법으로 획득합니다. X 포인트들은 Conveyor 좌표계의 X축을 계산하는데 쓰이는데, 기본적으로 X1, X2만으로 충분하지만, 정확도를 높이고 싶을 때 최대 4개까지 티칭할 수 있습니다. 티칭 개수에 따라 로봇이 티칭할 수 있는 범위 안에서 넓게 퍼뜨려서 티칭합니다.
[점 Y] 는 [컨베이어 좌표계] 의 Y축을 계산하는데 쓰이므로 원하는 작업물 기준 좌표계의 Y축이 만들어지도록 X Points 들 이외에 X-Y 평면 상에 티칭해서 획득합니다.

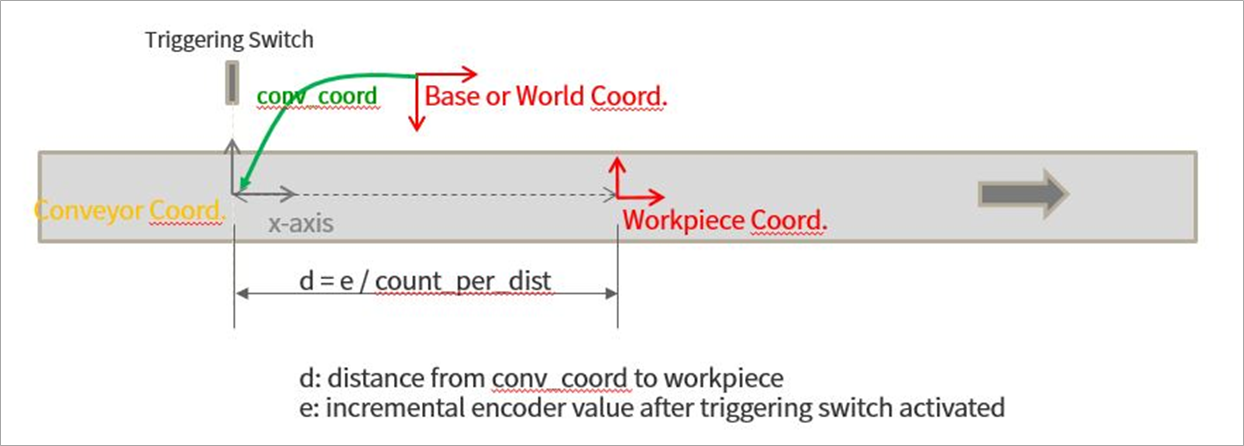
티칭점을 획득하고 [자동 계산] 를 누르면 [카운트/거리] 와 [컨베이어 좌표계] 가 자동 계산됩니다. [컨베이어 좌표계] 는 Triggering Switch의 물리적 위치 가까이로 계산되는지 확인해야 합니다. (작업물 검출 Edge에 따라서 Conveyor 방향으로 offset은 존재합니다)
매뉴얼 설정
작업물이 Triggering Switch를 지날 때 [컨베이어 좌표계] 에 x 방향으로 증가하는 엔코더 카운트를 반영하여 작업물의 위치를 계산합니다. 따라서, 아래 그림과 같이 Triggering Switch와 Conveyor 위치, 작업물 기준 위치를 참고해서 설정하면 되고, 정확히 알 수 없는 경우에도 [컨베이어 좌표계] 의 x축 방향만 맞게 설정해주면 나머지 offset은 [Task Editor] 모듈에서 Task Motion에 입력할 티칭점 획득 시 반영 되므로 정확히 입력하지 않아도 좋습니다.
[카운트/거리] 는 [Task Editor] 모듈 > [Conveyor Tracking] 커맨드로 Task Motion 없이 Wait 명령어만 넣어서 사용하게 되면 로봇이 현재 위치에서부터 Conveyor 움직임을 따라 Tracking하는데, 속도 경향을 보면서 실험적으로 조정할 수 있습니다. 로봇이 Conveyor 보다 느리게 따라갈 경우 [카운트/거리] 를 낮춰주고 빠르게 따라갈 경우 높여주면 됩니다.