사용자가 설정한 Digital Input/Output을 동작시키는 명령어 입니다.
출력 신호는 아래와 같이 설정 가능합니다.
-
단동식 옵션 선택 시 한 개의 포트 설정
-
복동식 옵션 선택 시 쌍으로 동작시킬 포트 두 개 설정
-
입력 신호는 포트 하나만 선택 가능합니다.
-
해당 명령어는 로봇 모션과는 무관합니다.
기본 정보
|
항목 |
설명 |
|---|---|
|
추천 디바이스 |
없음 |
|
옵션 기능 |
|
|
명령어 완성 조건 |
없음 |
|
지원 로봇 시리즈 |
E, A, AS, M, H, P |
기본 동작 순서
-
Output (Single Type) 설정 시: Output 신호 한 개 동작
-
Output (Double Type) 설정 시: Output 신호 두 개 동작
-
Input 설정 시: Input 신호 한 개 확인
화면 정의
|
항목 |
설명 |
기본값 및 입력 범위 |
|
|---|---|---|---|
|
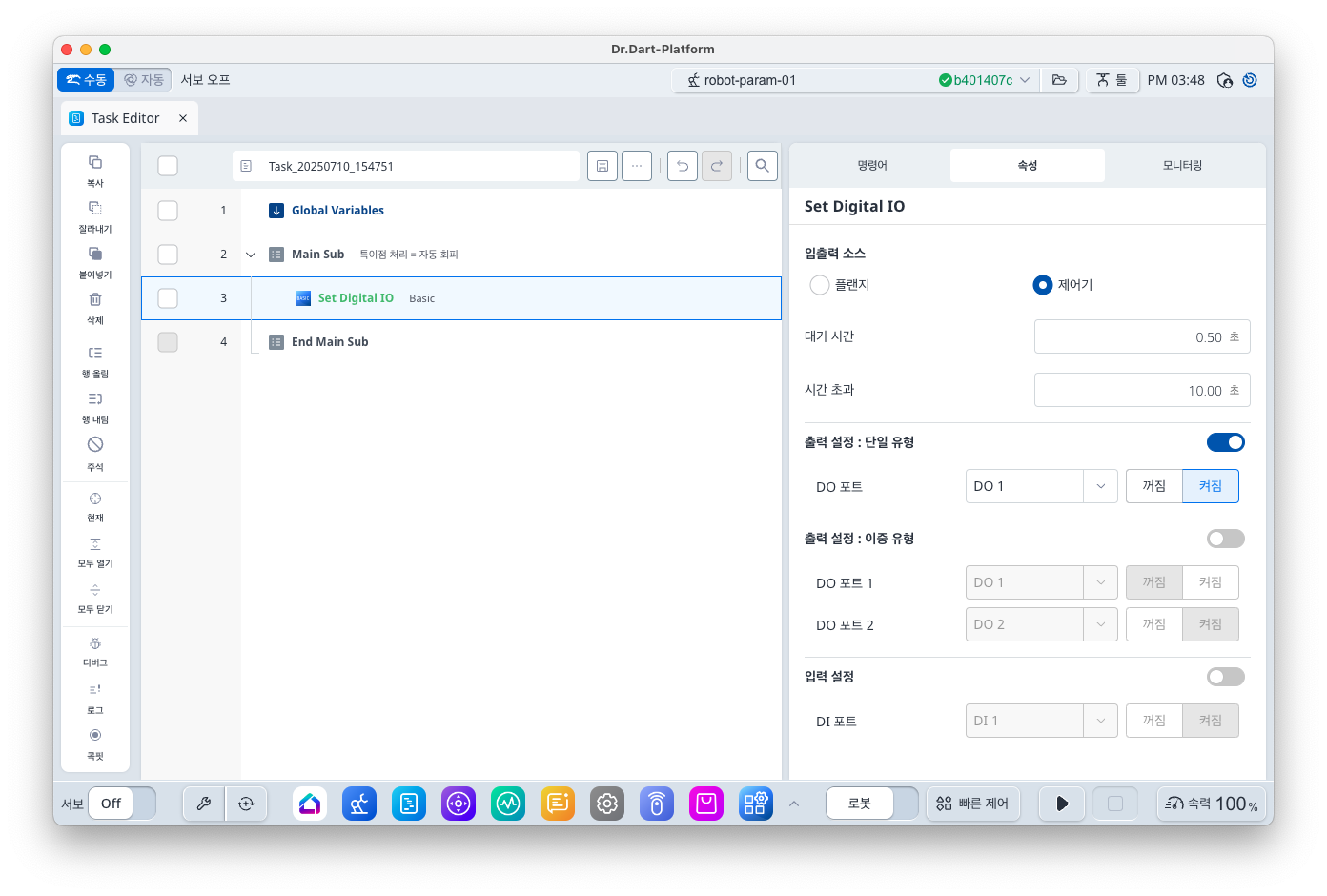
기본 설정 |
입출력 소스 |
Digital I/O 연결부 선택
|
제어기 [플랜지, 제어기] |
|
대기 시간 |
입출력 동작 후 대기 시간 |
0.5 s [0 ~ 10000] |
|
|
시간 초과 |
최대 입력 신호 대기 시간 |
10 s [0 ~ 10000] |
|
|
출력 설정: 단일 유형 (옵션) |
출력 포트 |
출력 포트
|
1 [1 ~ 16] |
|
출력 값 |
출력 포트 값 |
켜짐 (1) [꺼짐 (0), 켜짐(1)] |
|
|
출력 설정: 이중 유형 (옵션) |
출력 포트1 |
출력 포트1 |
1 [1 ~ 16] |
|
출력 값1 |
출력 포트1 값 |
꺼짐 (0) [꺼짐 (0), 켜짐(1)] |
|
|
출력 포트2 |
출력 포트2 |
2 [1 ~ 16] |
|
|
출력 값2 |
출력 포트2 값 |
켜짐 (1) [꺼짐 (0), 켜짐(1)] |
|
|
입력 설정 (옵션) |
입력 포트 |
입력 포트
|
1 [1 ~ 16] |
|
입력 값 |
입력 포트 값 |
켜짐 (1) [꺼짐 (0), 켜짐(1)] |
|