|
項目s |
概要 |
|
|---|---|---|
|
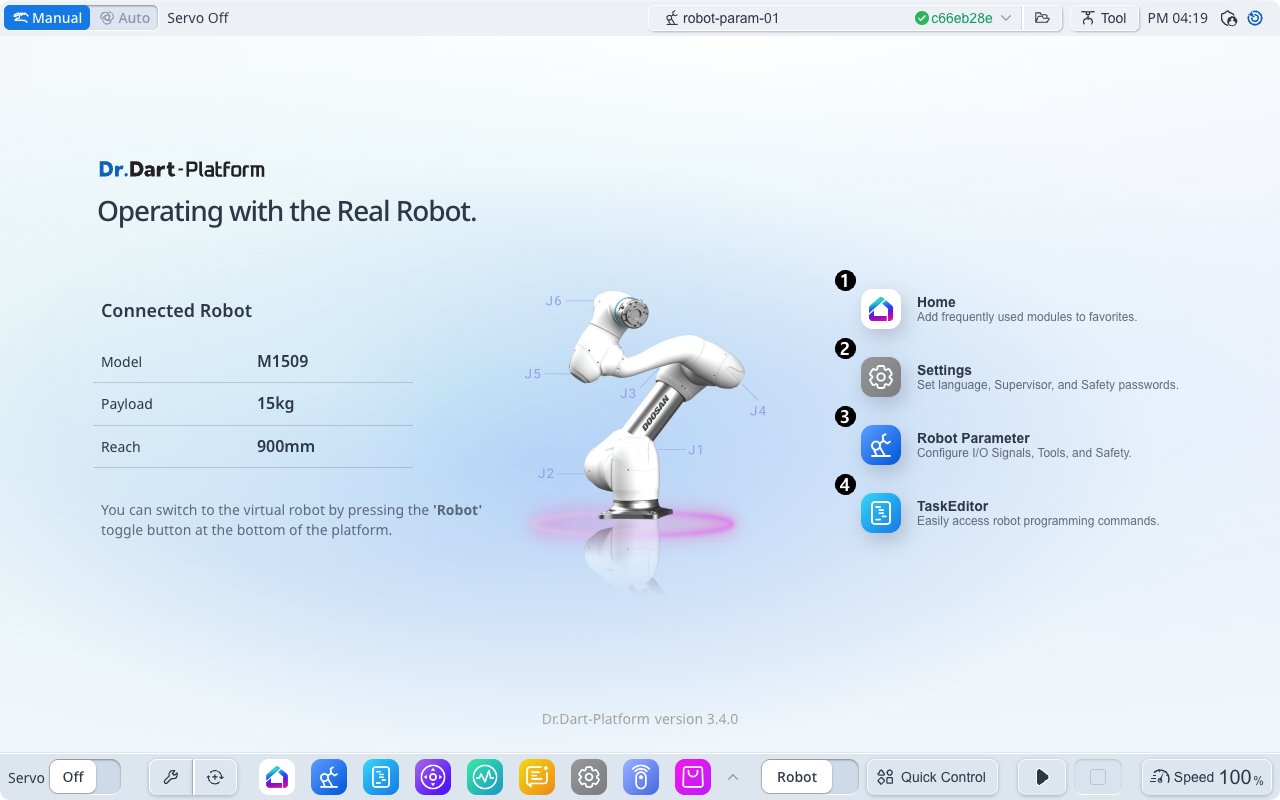
1 |
ホームモジュールアイコン |
ホームモジュールを起動する。 |
|
2 |
設定モジュールアイコン |
設定モジュールを起動する。 |
|
3 |
ロボットパラメータモジュールアイコン |
ロボットパラメーターモジュールを起動する。 |
|
4 |
タスクエディタモジュールアイコン |
タスクエディターモジュールを起動する。 |
|
項目s |
概要 |
|
|---|---|---|
|
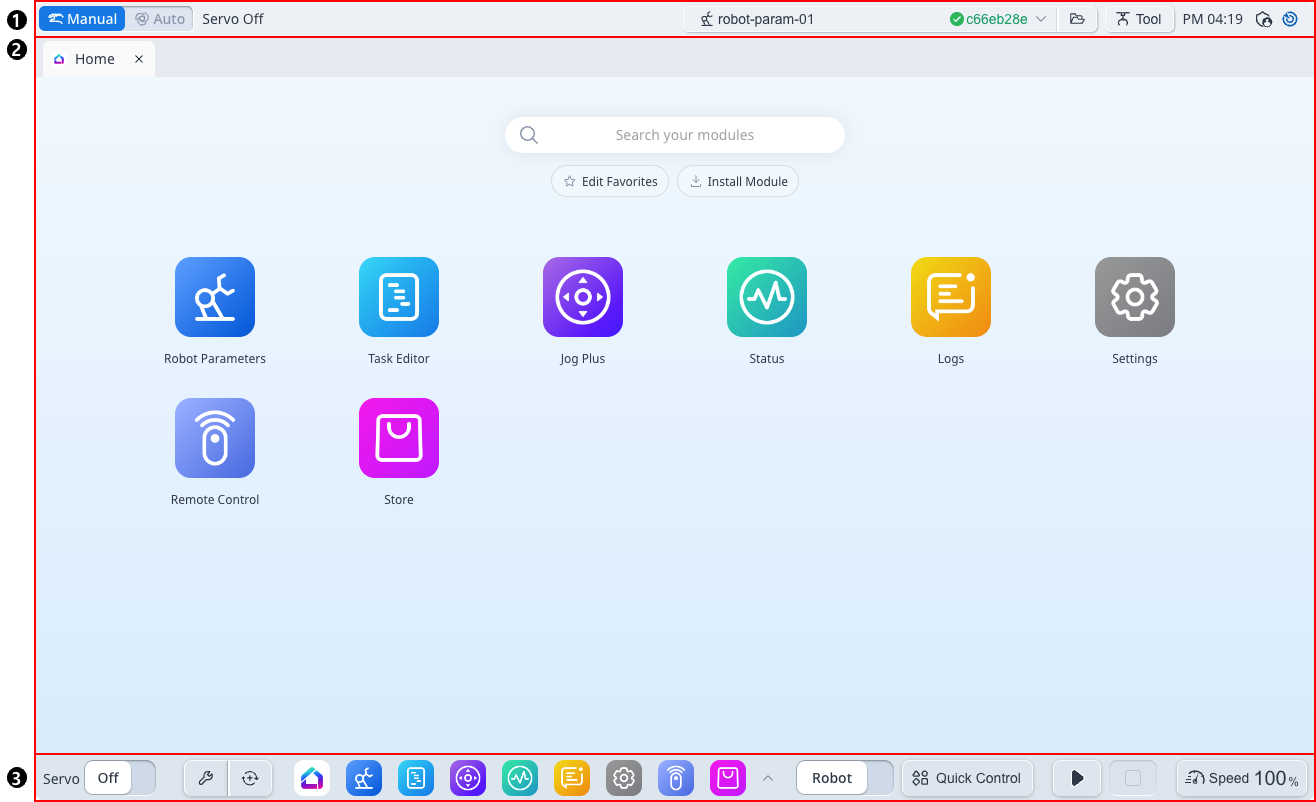
1 |
ヘッダー |
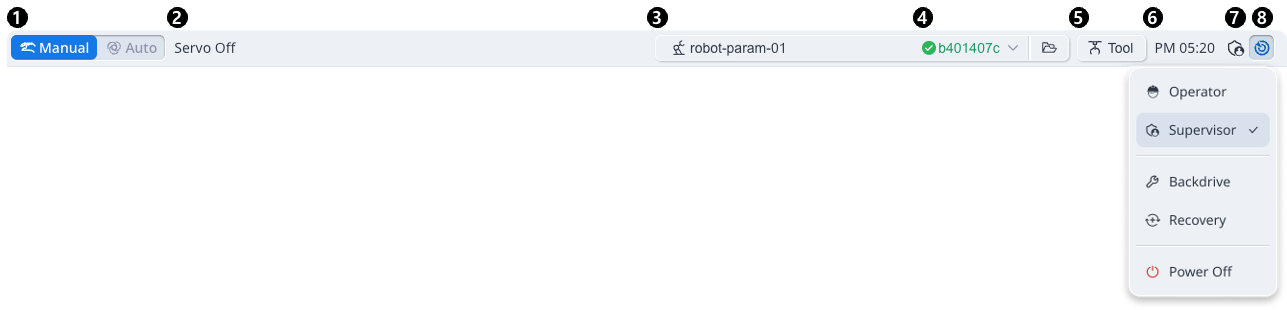
自動/手動モード切り替え、ロボットステータス、ロボットパラメーター、ツール設定、メニュー、時間を提供するパネル。 |
|
2 |
本文 |
実行したモジュールの画面を表示するパネル。 |
|
3 |
フッター |
サーボスイッチ、お気に入りモジュール、ロボット/仮想モードスイッチ、クイックコントロールおよびプログラムコントロール、およびロボット速度コントロールを提供するパネル。 |
ホーム画面の概要
|
項目s |
概要 |
|
|---|---|---|
|
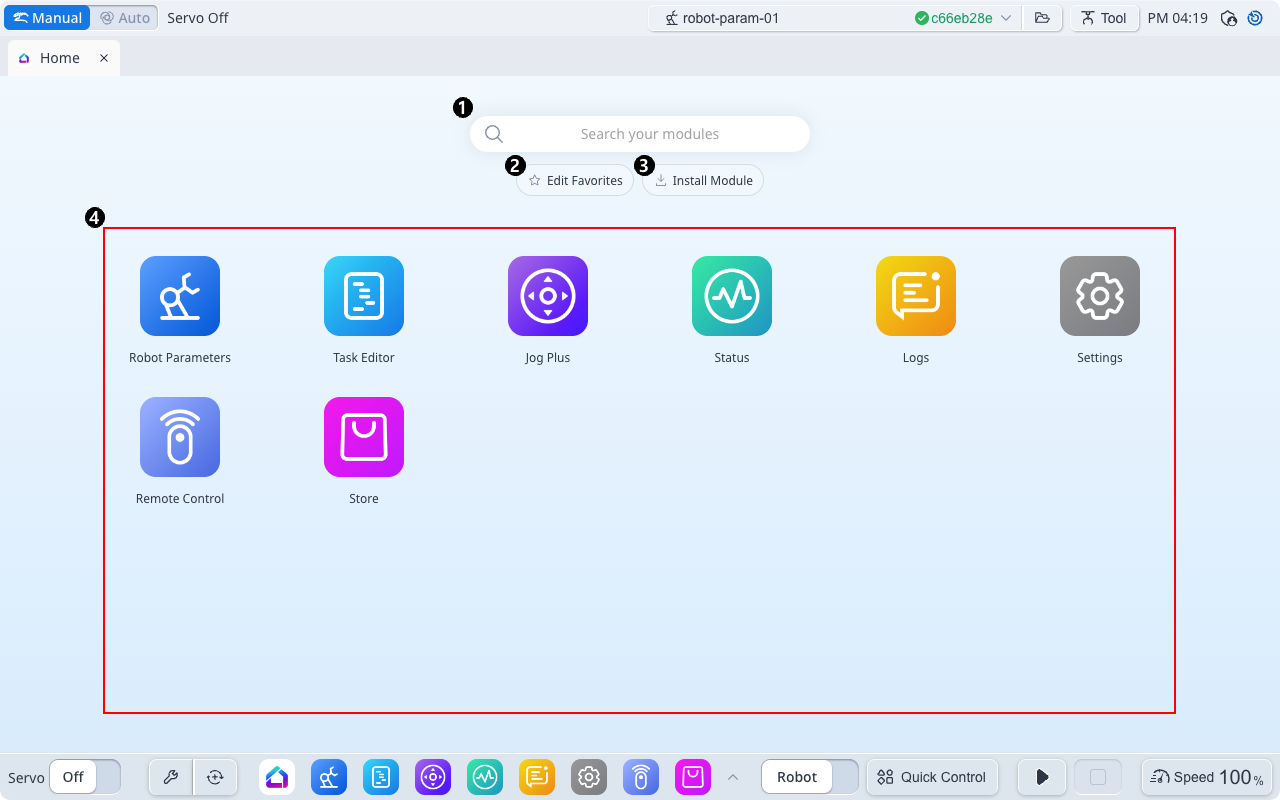
1 |
検索 |
インストールされているモジュールを検索できる。 |
|
2 |
お気に入りを編集 |
フッターのお気に入りモジュールリストに表示するモジュールを選択できる。 お気に入りの編集 ボタンをクリックしてモジュールのチェック/チェック解除を行うと、すぐにフッターのお気に入りモジュールリストに適用される。 お気に入りを保存 ボタンをクリックして、お気に入りの修正を終了する。 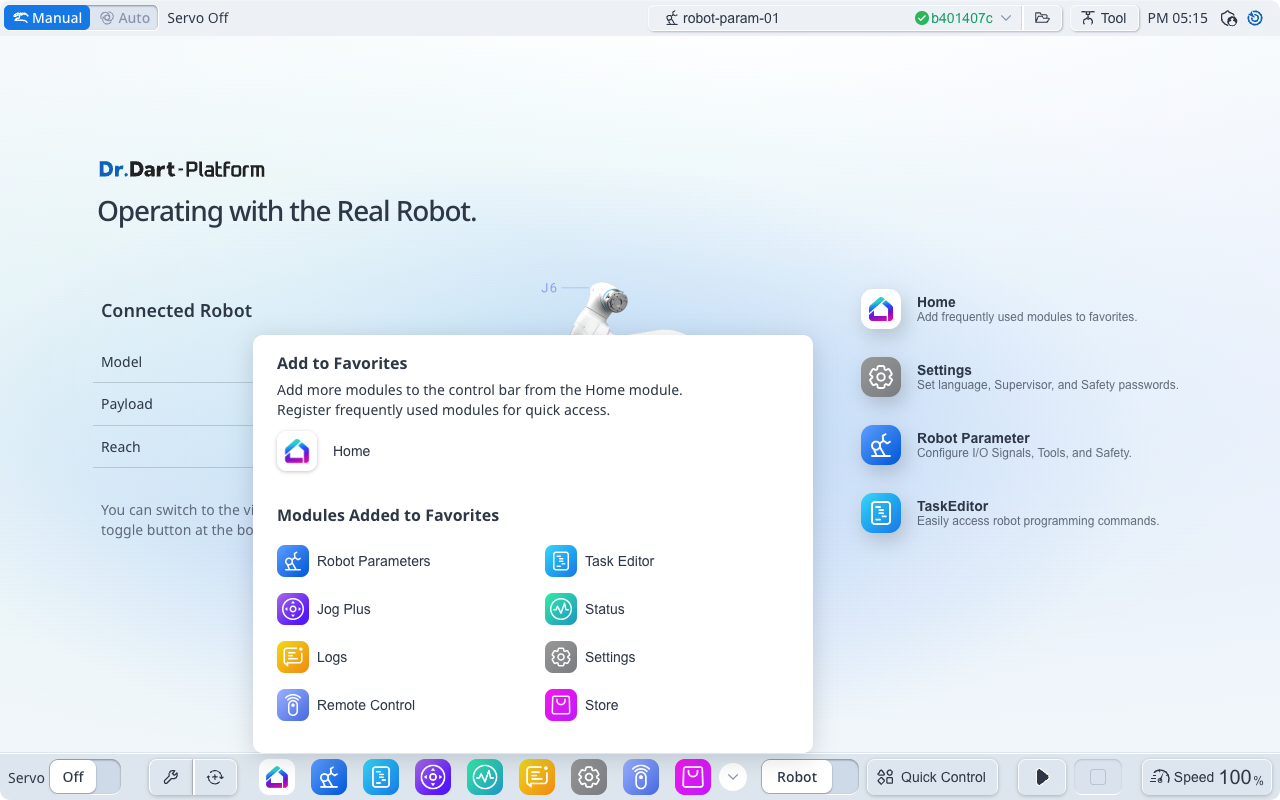
|
|
3 |
モジュールのインストール |
ダウンロードしたモジュールパッケージのインストールファイル(*.dm)を選択すると、モジュールをインストールできる。 |
|
4 |
モジュール |
実行可能モジュールのアイコンが表示される。 |
ヘッダーの概要
|
項目s |
概要 |
|
|---|---|---|
|
1 |
ロボットモードスイッチ |
これはAuto ↔︎ Manualに変更可能。 |
|
2 |
ロボットステータス |
リンクを見る |
|
3 |
ロボットパラメータファイル |
現在設定されているロボットパラメータファイルの名前を表示する ロボットパラメータファイルの設定値がコントローラで設定した情報と一致しない場合は、以下のように表示される。 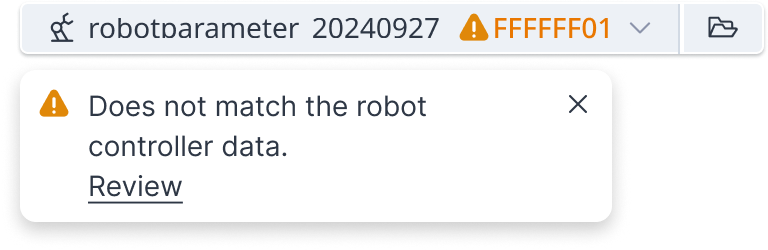
|
|
4 |
安全チェックサム |
コントローラに設定されたロボットパラメータのチェックサム情報が表示される。 |
|
5 |
ツール設定 |
ここで、現在のTCP、工具重量、および工具形状を設定できる。 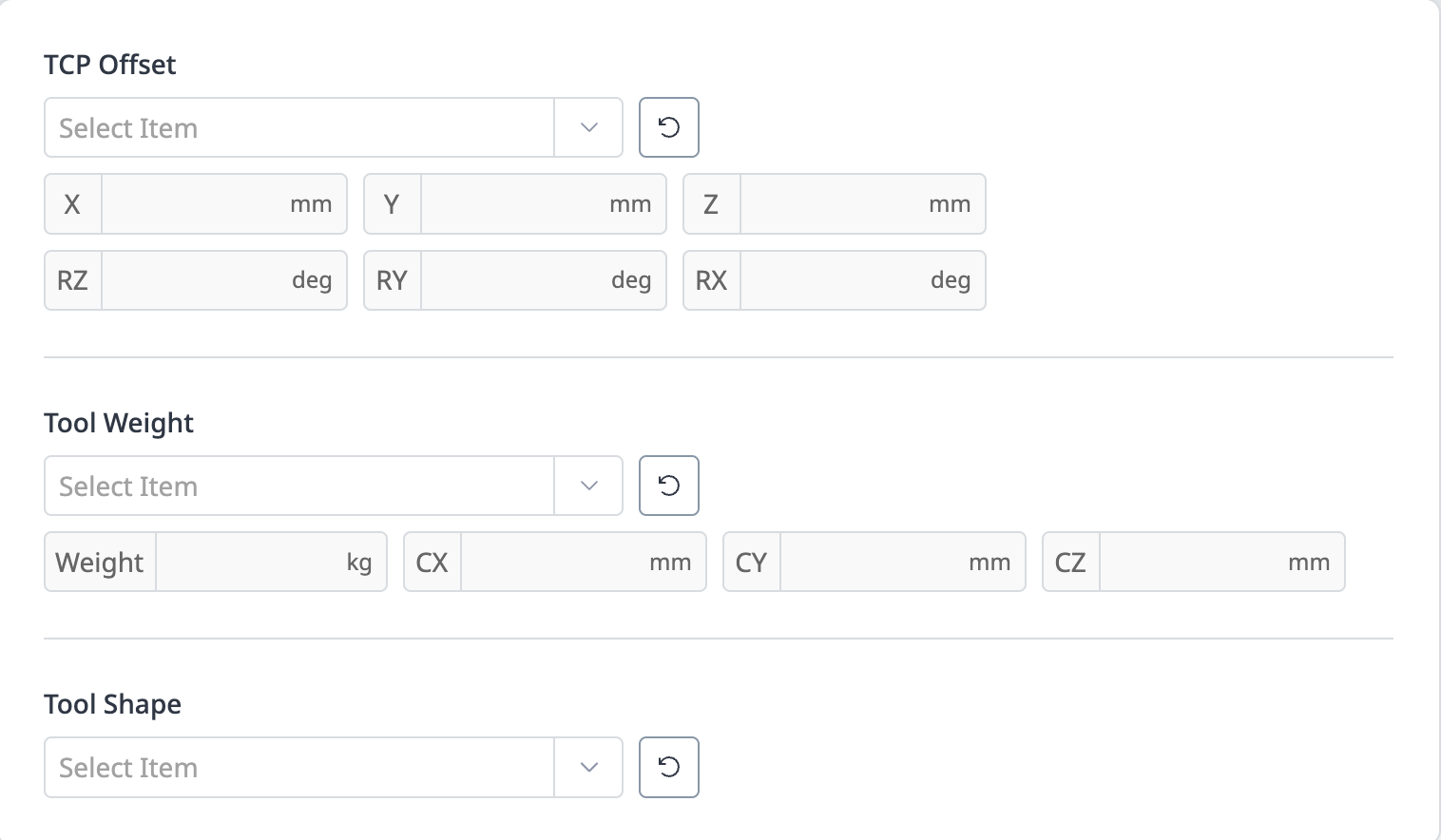
|
|
6 |
現在の時刻情報 |
現在の時刻が表示される |
|
7 |
ユーザー権限 |
現在設定されているユーザ権限(オペレータ/スーパーバイザ)情報を表示する。
|
|
8 |
メニュー |
メニュー ボタンをクリックして、次のメニューを表示する。
|
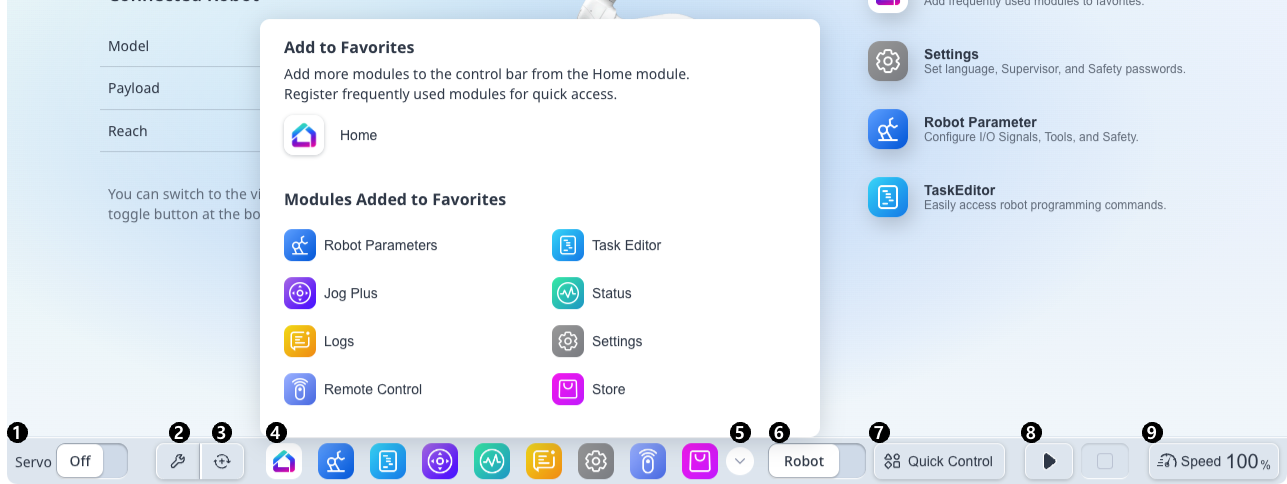
フッターの概要
|
項目s |
概要 |
|
|---|---|---|
|
1 |
サーボスイッチ |
サーボはオンまたはオフにすることができる。 |
|
2 |
バックドライブ |
バックドライブモジュールを実行する。 |
|
3 |
復旧 |
回復:リカバリモジュールを実行する。 |
|
4 |
お気に入りのモジュール |
Homeモジュールで設定したお気に入りモジュールが表示される。 ※ホームモジュールは常に表示される。 |
|
5 |
お気に入りモジュールのポップアップ |
お気に入りのモジュールをすべて表示し、ドラッグアンドドロップの順序を変更できる。 |
|
6 |
ロボット/仮想スイッチ |
ロボット ↔︎ 仮想モードを切り替えることができる。 ※実際のロボットが接続されている場合のみ使用可能。 |
|
7 |
クイックコントロール |
3Dシミュレーター、ジョグ、およびダッシュボード機能を提供するポップアップを切り替えることができる。 |
|
8 |
プログラムコントロール |
DRL/TASKプログラムの再生、一時停止、再開、停止を行うためのコントロールボタンが用意されている。 |
|
9 |
スピードコントロール |
現在のロボット速度情報が表示され、速度変更ポップアップでロボット速度を変更できる。 
|