製品の紹介(CS-12P)
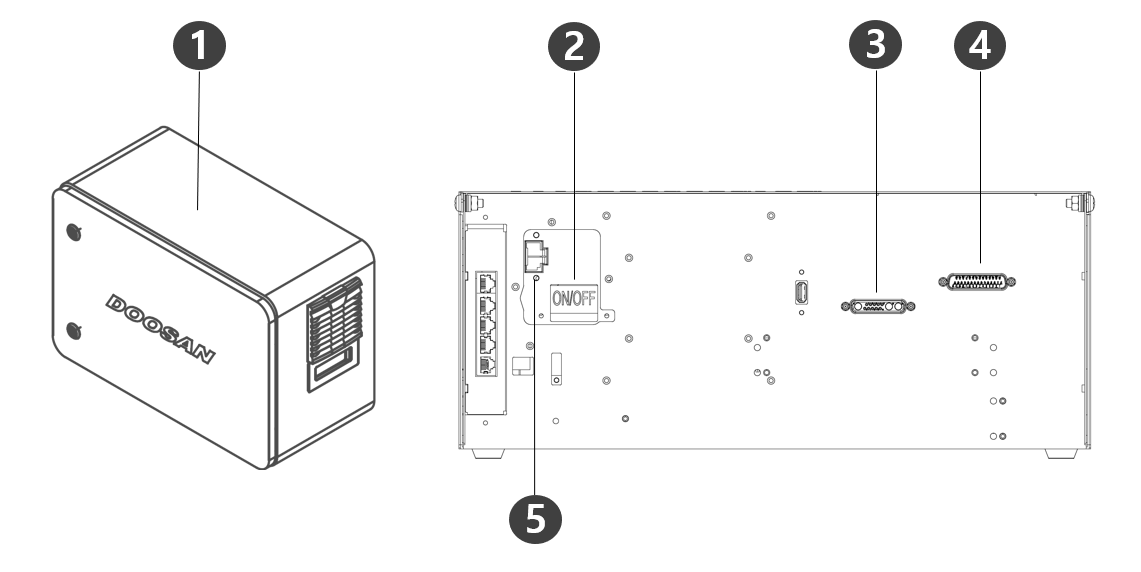
各部品と機能の名称
|
いいえ。 |
項目s |
概要 |
|
1 |
I/O接続端子(内部) |
他のロボットのコントローラや周辺機器と接続可能。 |
|
2 |
電源スイッチ |
コントローラの主電源のオン/オフを切り替えるために使用する。 |
|
3 |
ティーチペンダントケーブル接続端子 |
ティーチペンダントケーブルをコントローラに接続するために使用する。 |
|
4 |
ロボットケーブル接続端子 |
ロボットケーブルをコントローラに接続するために使用する。 |
|
5 |
電源接続端子 |
コントローラ電源の接続に使用。 |
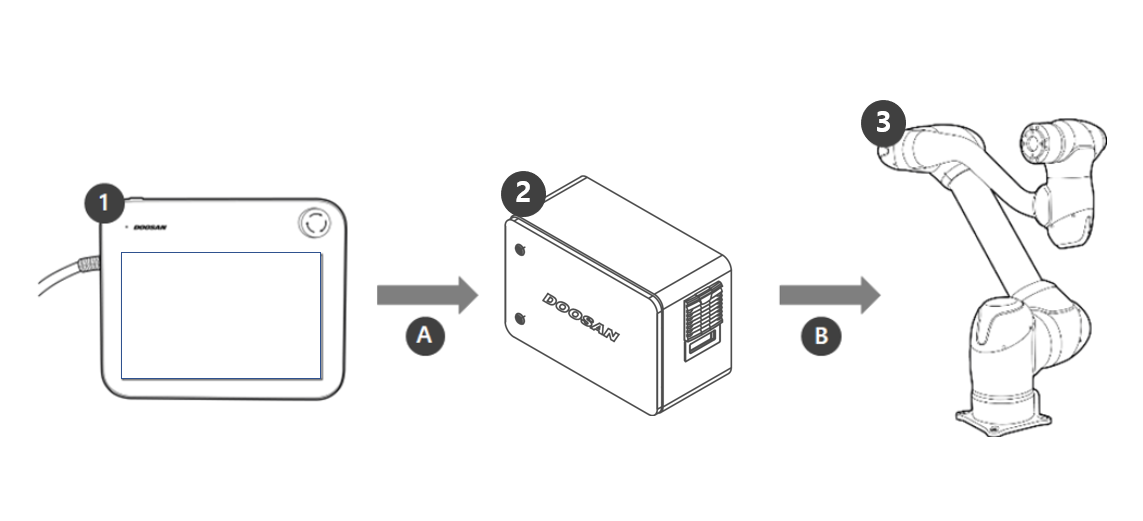
システム構成
|
いいえ。 |
名称 |
概要 |
|---|---|---|
|
1 |
ティーチペンダント |
この装置はシステム全体を管理し、ロボットに特定のポーズを教えたり、マニピュレータやコントローラに関連する設定を行うことができる。 |
|
2 |
コントローラー |
ティーチペンダントで設定されたポーズや動きに応じてロボットの動きを制御する。様々なI/Oポートを備えており、様々な機器やデバイスの接続や使用が可能である。 |
|
3 |
マニピュレータ |
様々なツールを使って輸送や組み立て作業を行うことができる産業用協働ロボットである。 |
|
A |
コマンド/監視 |
|
|
B |
電源/ネットワーク |
|
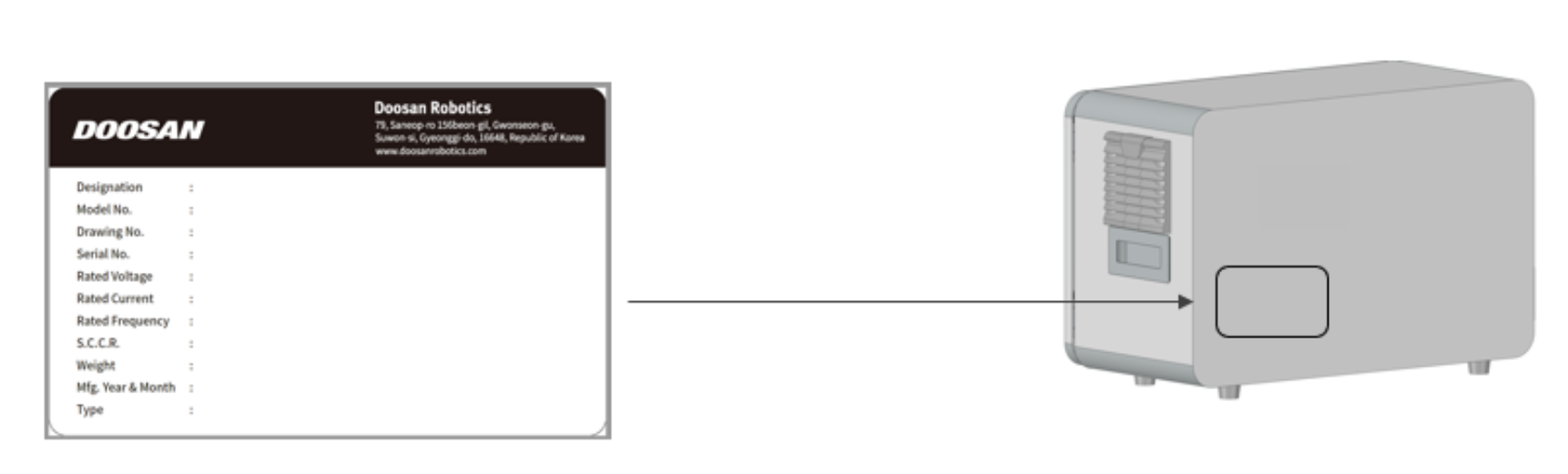
銘板とラベル
インストール(CS-12P)
設置時の注意事項
注意
-
コントローラを取り付ける前に十分なスペースを確保する。十分なスペースが確保されていない場合、コントローラが損傷しているか、マニピュレータまたはティーチペンダントケーブルが不足している可能性がある。
-
製品に電源を接続するときは、入力電源を確認する。接続されている入力電源が定格電源入力(22-60VDC)と異なる場合、製品の多くが正常に動作しないか、コントローラが破損する可能性がある。
インストール環境
コントローラを取り付ける際には、次の点を考慮する。
-
コントローラを取り付ける前に十分なスペースを確保する。
-
コントローラを固定しなければならない。
-
可動車両にコンポーネントが固定されていないことを確認する。
ハードウェアの取り付け
マニピュレータを操作する前に、ロボット、コントローラ、ティーチペンダント、システムの主要コンポーネントを取り付け、それらに電力を供給する。各要素のインストール手順は以下のとおりである。
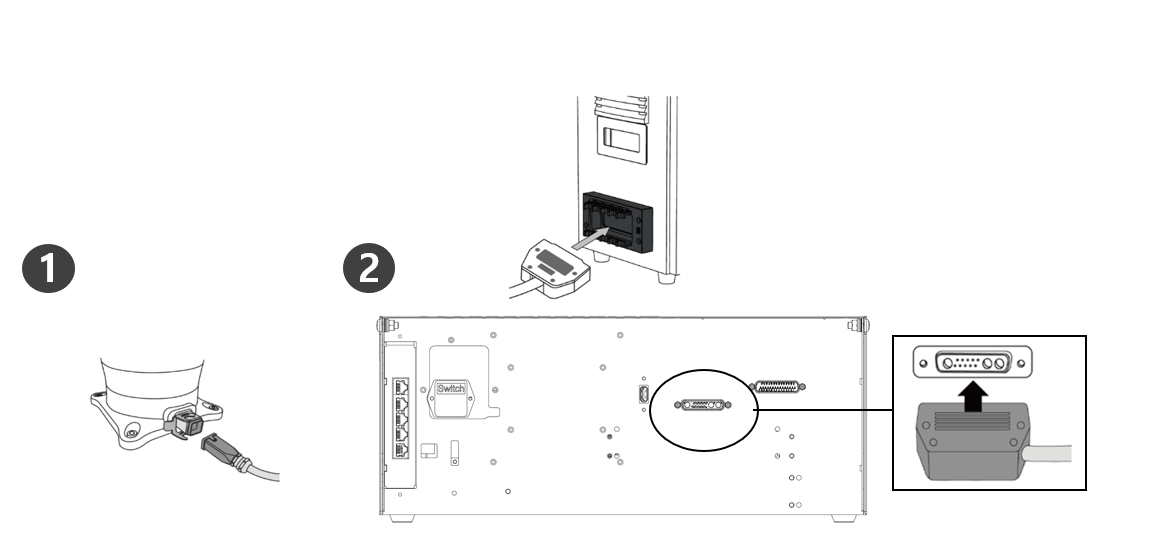
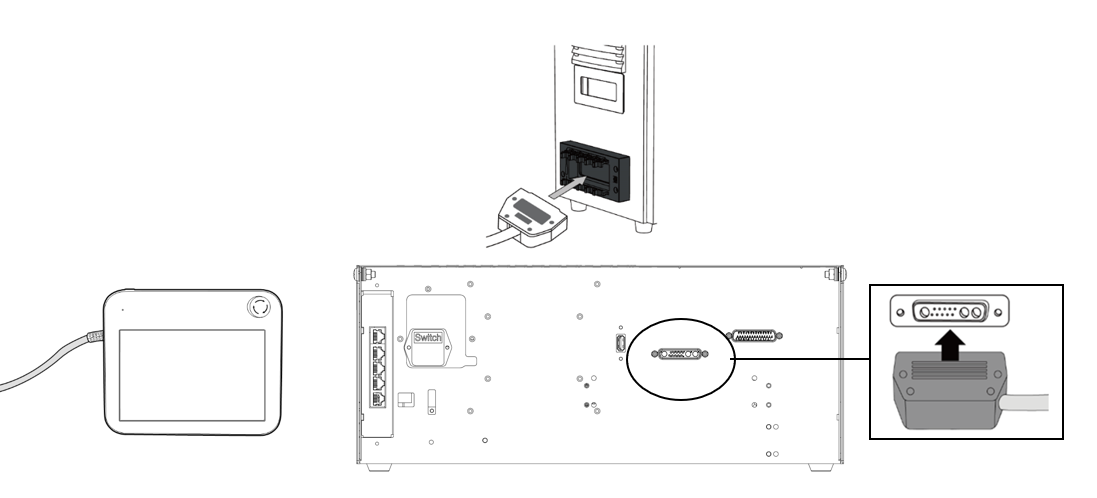
マニピュレータをコントローラに接続する
|
|
概要 |
|---|---|
|
1 |
マニピュレータケーブルをコントローラに接続し、固定リングを配置する
|
|
2 |
マニピュレータ接続ケーブルの反対側の端をコントローラに接続する
|
注意
-
ロボットの電源が入っている間はマニピュレータケーブルを外さないこと。これにより、ロボットが誤動作する可能性がある。
-
マニピュレータケーブルに変更や拡張を加えないこと。
-
コントローラを床に取り付けるときは、十分な換気を確保するために、両側に少なくとも50 mmの隙間を確保する。
-
コントローラの電源を入れる前に、コネクタを正しくロックしておくこと。
注釈
-
システムの構成時には、ノイズの影響やシステムの誤動作を防ぐために、ノイズ低減装置を設置することを推奨する。
-
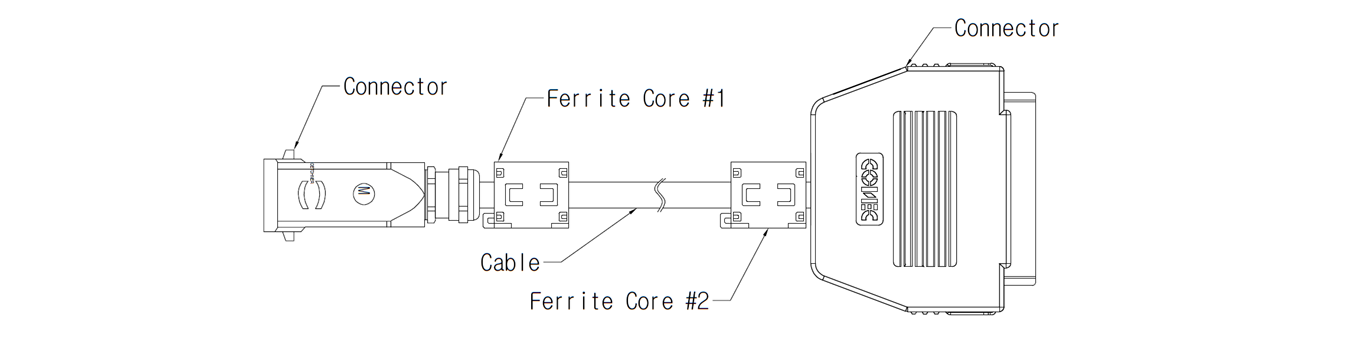
電磁波によるノイズの影響を受ける場合は、正常に動作するためにフェライトコアを設置する必要がある。インストール場所は次のとおりである。
コントローラをティーチペンダントに接続
ティーチペンダントケーブルを、カチッと音がするまでコントローラの対応する接続部に接続し、ケーブルがしっかりと差し込まれていることを確認する。
注意
-
ケーブルを接続するときは、ピンが曲がらないように接続する前に接続の形状を確認する。
-
ティーチペンダントをモバイル車両またはコントローラに吊り下げて使用する場合は、接続ケーブルにつまずいてはならないように注意すること。
-
コントローラ、ティーチペンダント、ケーブルが水に触れないように注意すること。
-
ほこりや濡れた環境にコントローラとティーチペンダントを設置しないこと。
-
コントローラおよびスマートペンダントは、IP20グレード以上の粉塵環境にさらさないこと。導電性粉塵のある環境では特に注意が必要である。
注釈
-
システムの構成時には、ノイズの影響やシステムの誤動作を防ぐために、ノイズ低減装置を設置することを推奨する。
-
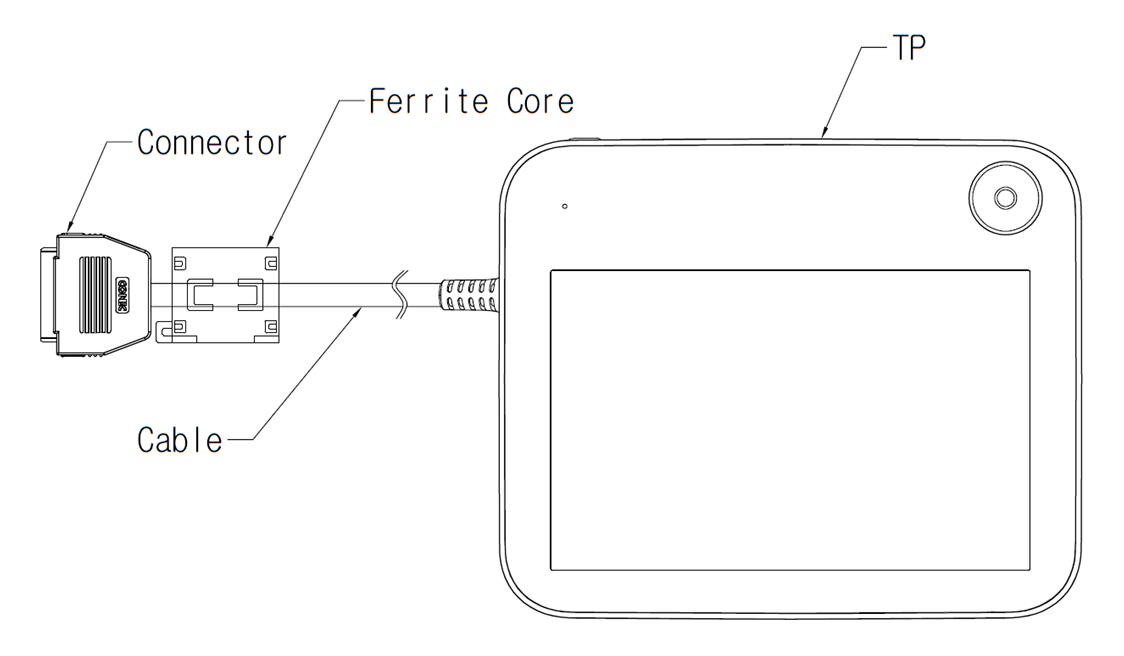
ティーチペンダントが電磁波によるノイズの影響を受けている場合は、正常に動作するようフェライトコアを取り付ける必要がある。インストール場所は次のとおりである。
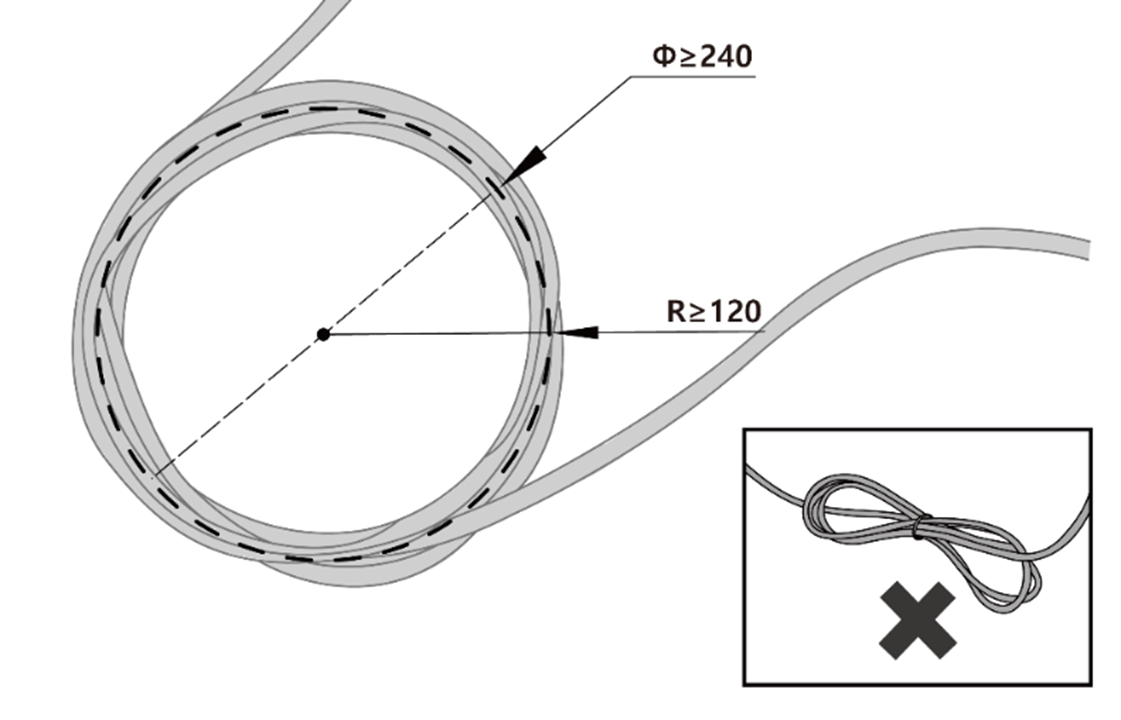
マニピュレータケーブルとティーチペンダントケーブルの配置
マニピュレータとティーチペンダントケーブルの曲率半径が最小曲率半径(120 mm)より大きいことを確認する。
注意
-
ティーチペンダントケーブルとティーチペンダントコネクタ間の曲率半径が最小曲率半径(120 mm)より大きいことを確認する。
-
曲率半径が最小曲率半径(120 mm)より小さい場合、ケーブルの切断や製品の損傷が発生する可能性がある。
-
電磁ノイズが発生する可能性のある環境では、誤動作を防止するために適切なケーブルを取り付ける必要がある。
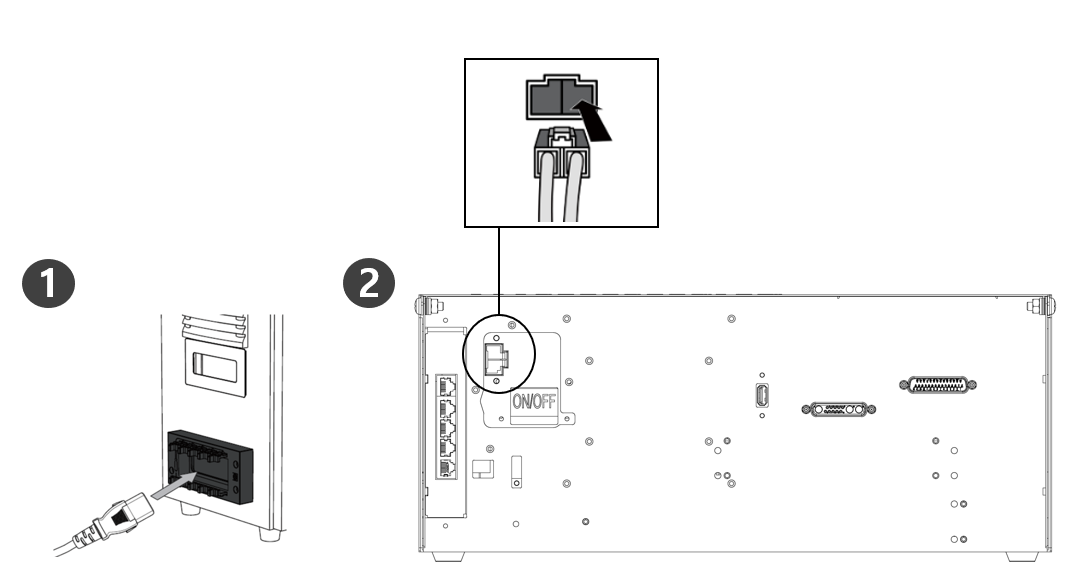
電源をコントローラに接続する
電源ケーブルをコントローラの対応する接続部にカチッと音がするまで接続し、ケーブルがしっかりと差し込まれていることを確認する。
警告
-
電源ケーブルを接続した後、ロボットが適切に接地されていることを確認する(電気接地接続)。コントローラ内のグラウンドシンボルに関連する未使用のボルトを使用して、システム内のすべての機器に共通のグラウンドを確立する。接地導体は、システムの最大電流定格を満たしていなければならない。
-
サーキットブレーカなどのデバイスを使用して、コントローラの入力電源を保護する。
-
ロボットケーブルを変更したり延長したりしないこと。火災やコントローラの故障の原因となる。
-
コントローラに電源を供給する前に、すべてのケーブルが正しく接続されていることを確認する。必ず製品パッケージに同梱されているオリジナルのケーブルを使用すること。
-
入力電圧の極性を誤って接続しないように注意する。
注釈
-
システムを構成するときは、すべてのデバイスを一度にオフにできる電源スイッチを取り付けることを推奨する。
-
DC用コントローラを使用する場合、負荷や動作によってロボットの動作が制限されることがある。
-
入力電圧が48V未満の場合、負荷や動作によってロボットの動作が制限されることがある。
-
電源は、アースや回路ブレーカーなどの最小要件を満たしていること。電気仕様は以下の通りである。
|
パラメータ |
仕様 |
|
入力電圧 |
22~60 VDC |
|
定格入力電流 |
30 A |