ユーザーは、[ジョグ(Jog)]タブから手動移動方法を選択できる。
-
ジョグ:ロボットジョイントまたはTCPを、ユーザーが選択したジョイント軸または座標軸に移動する
-
移動:ロボットジョイントまたはTCPをユーザーが入力したターゲット点に移動する
ロボットの動きは2つのタイプからなる。
-
ジョイント動作:回転運動で各ジョイントを直線的に移動する
-
タスクの動作:終点をターゲット点に直線的に移動する
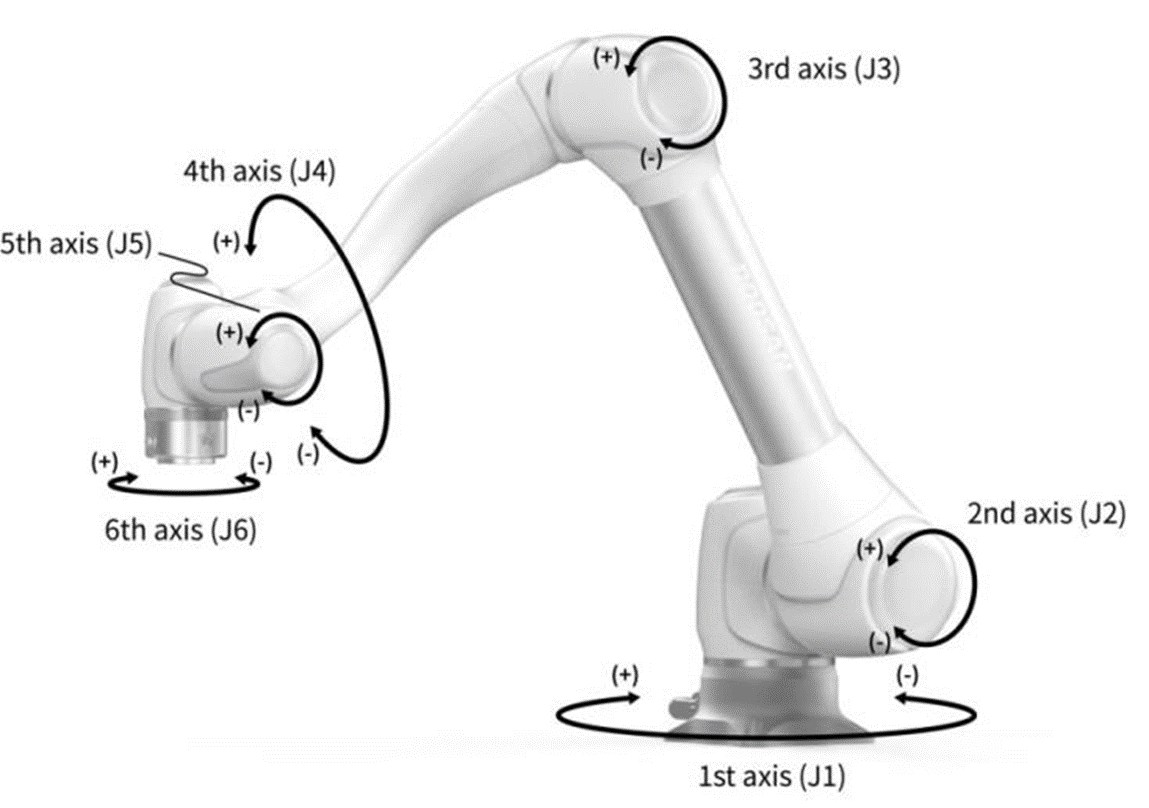
ジョグ画面からジョイント動作を使用してロボットを移動する方法を以下に示す。
-
[ジョイント(Joint)]タブを選択する。
-
移動する軸を選択する。例えば、J1を選択する。
-
+/-ボタンを押してロボットを移動する。+/-ボタンを押したままロボットが動き、リアルタイムで画面上に現在地が表示される。
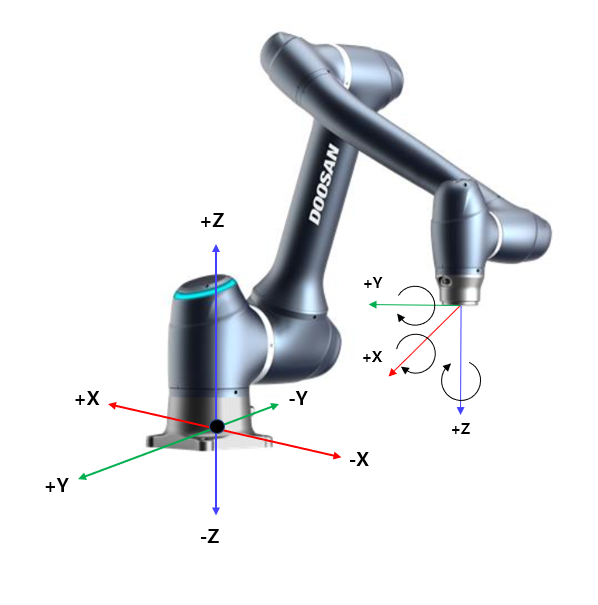
ジョグ画面でタスクモーションを使用してロボットを移動する方法を以下に示す。
-
ベース座標を選択する。ロボットは、ベース座標または工具座標に従って移動できる。
-
移動する方向を選択する。例えば、X軸を選択することができる。
-
+/-ボタンを押してロボットを移動する。+/-ボタンを押したままロボットが動き、リアルタイムで画面上に現在地が表示される。
ジョグの移動、移動、位置合わせの詳細については、『ジョ グパネル』および『 パネルの移動』を参照。 respectively.
注釈
ジョグ画面の左上にある実際のモードのトグルスイッチをオフにすると、ロボットはジョグ画面の左側の仮想画面上でのみ移動する。実際のモードトグルスイッチをオンにすると、実際のロボットが移動する。
Jog Plus モジュールを使用すると、ユーザーは手動モードで作業スペース全体を探索したり、操作スペースをロボット操作スペースとして設定したりできる。各軸の移動角度は、安全設定の選択された操作スペースとジョイント角度制限に応じて制限することができる。
Jog Plus機能を使用するには、 メインメニューのJog Plusモジュールをタップする。
-
サーボオフ中はジョグ機能を使用できない。.
-
ロボットは Jog Plus 画面で手動で操作されるため、Jogボタンを押したときにのみロボットが移動する。
-
[ジョグプラス(Jog Plus)] タブ画面で、現在の位置に基づいてロボットを移動できる。
-
ロボットは、[ 移動(Move)] タブ画面でターゲットの角度/座標を設定することで移動できる。
-
ジョグプラス タブ画面と 移動 タブ画面で、ジョイントまたはタスクとして基準座標を設定することができる。
注釈
ジョグプラス モードの操作スペース以外のスペースに位置しているためにロボットをナビゲートできない場合は、ロボット操作スペースを「なし」に設定してロボットをナビゲートできるようにする。
注釈
このモジュールは自動モードでは使用できない。右下のトグルボタンをタップすると、手動モードで使用できるようになる。
Job Plus(Jog+)を使用すると、異なる作業を実行しながら同時にジョグ機能を使用できる。ティーチング中にロボットを目標点に移動させるために手動制御が必要な場合に利用できる。