생성된 경로를 실제 로봇에 적용하기 위해서는 CAD 좌표계 상에서 생성된 경로를 로봇 좌표계로 변환하는 일이 필요합니다. 또는 로딩된 CAD 형상을 로봇 좌표계로 변환한 후 경로를 생성할 수도 있습니다.
-
사용자는 로봇 공간에서 CAD 모델과 실제 모델 모두에서 공통된 점들을 찾아야 합니다
-
사용자는 로봇 좌표계에서 공통된 점들의 좌표계를 계산해야 합니다.
-
프로그램은 CAD 공간의 시작점에서 로봇 공간의 목표점까지의 변환 행렬을 계산합니다.
-
사용자가 변환 매트릭스를 CAD 모델에 적용하면 모델이 로봇 공간으로 변환됩니다.
위 절차를 정합(Registration)이라고 합니다. DART-Studio는 이를 위해 다음과 같은 기능을 제공합니다.
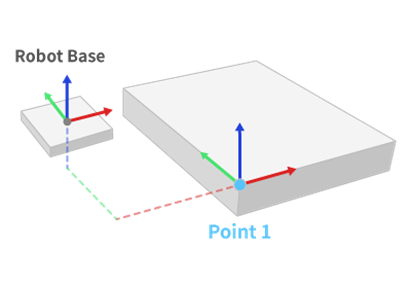
점 대 점 정합
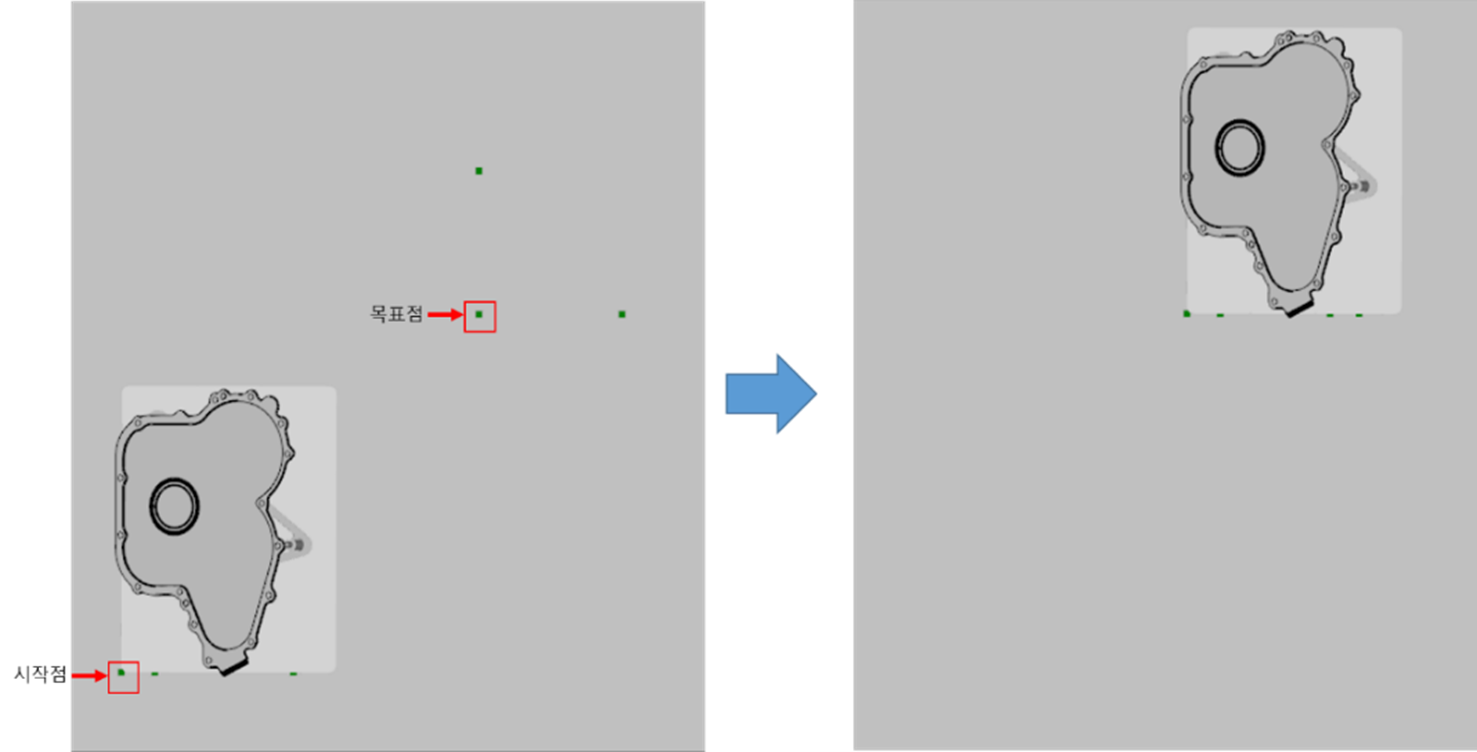
시작점을 목표점으로 이동하는 변환을 생성하고, 선택된 개체에 변환을 적용합니다.
점 대 점 정합 기능은 물체가 X, Y, Z축에 반듯하게 정렬되어 있는 경우에 사용합니다.
-
메뉴에서 개체 정합 버튼을 클릭하십시오.

-
활성창에서 한점 대 한점 정합 옵션을 선택합니다.
-
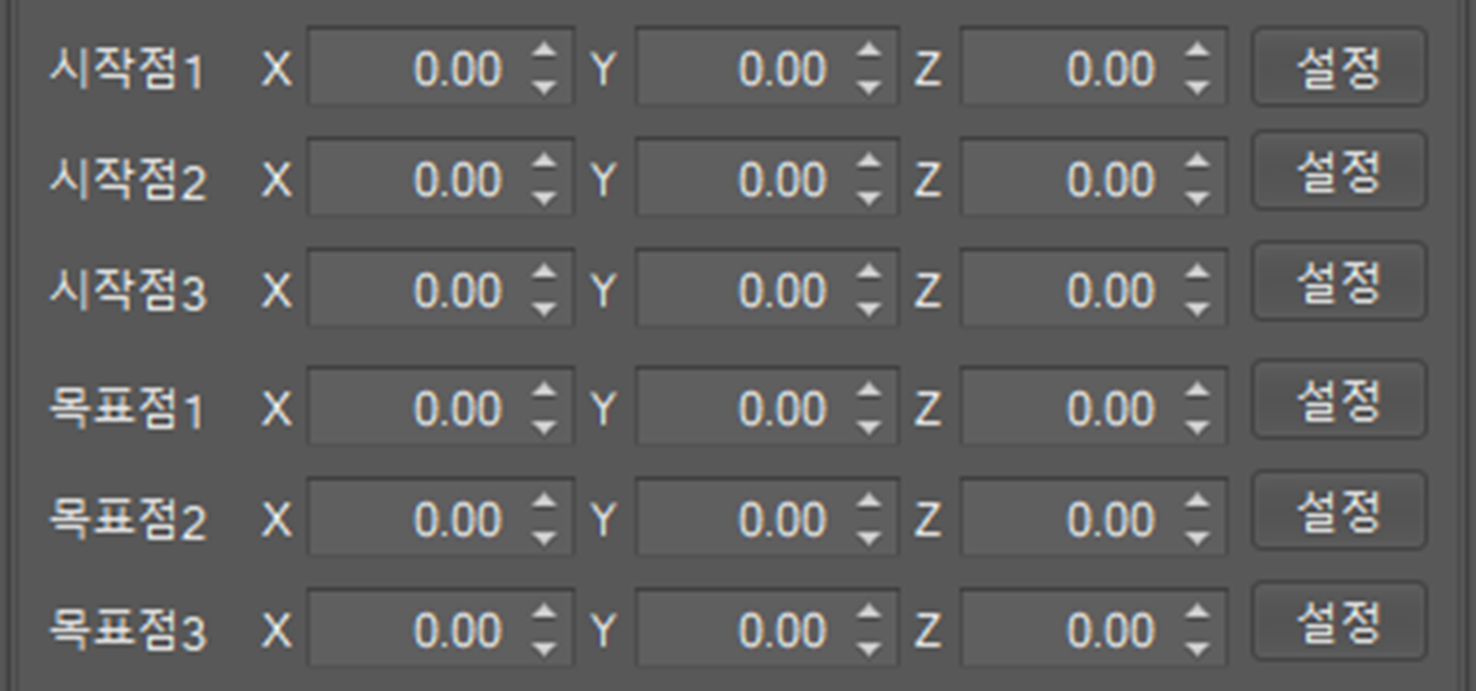
시작점과 목표점을 설정합니다.

-
이동할 개체를 선택합니다.
-
이동 기능을 실행합니다.
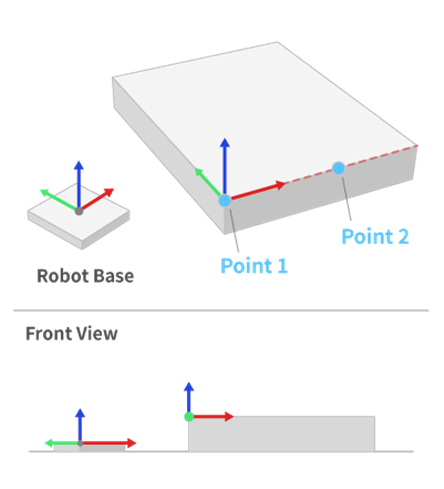
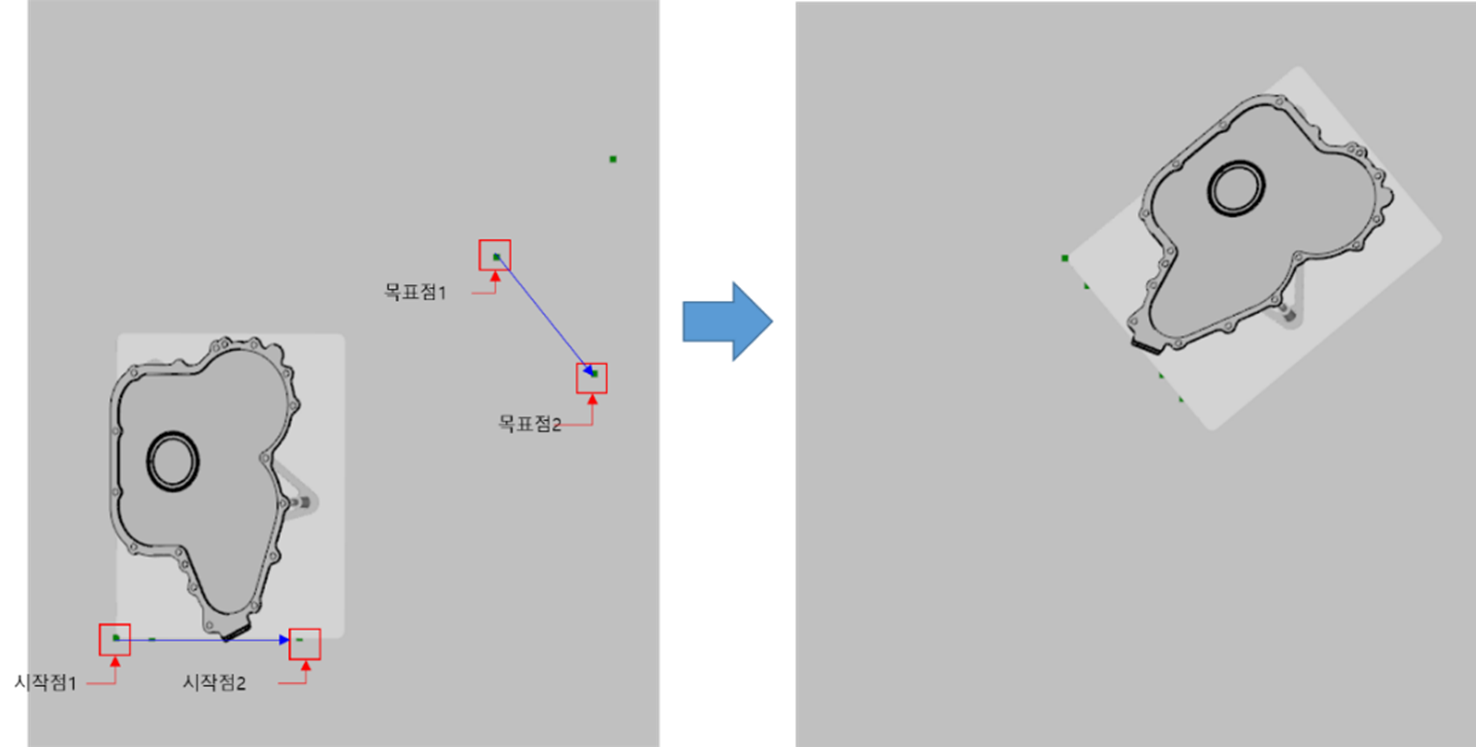
직선 대 직선 정합
시작 직선을 목표 직선으로 이동하는 변환을 생성하고, 선택된 개체에 변환을 적용합니다. 변환이 적용되면 시작 직선의 시작점이 목표 직선의 시작점으로 이동하고, 시작 직선과 목표 직선이 일치하게 됩니다.
직선 대 직선 정합 기능은 물체가 XY평면에 반듯하게 정렬되어 있는 경우에 사용합니다.
-
메뉴에서 개체 정합 버튼을 클릭하십시오.
-
활성창에서 직선 대 직선 정합 옵션을 선택합니다.
-
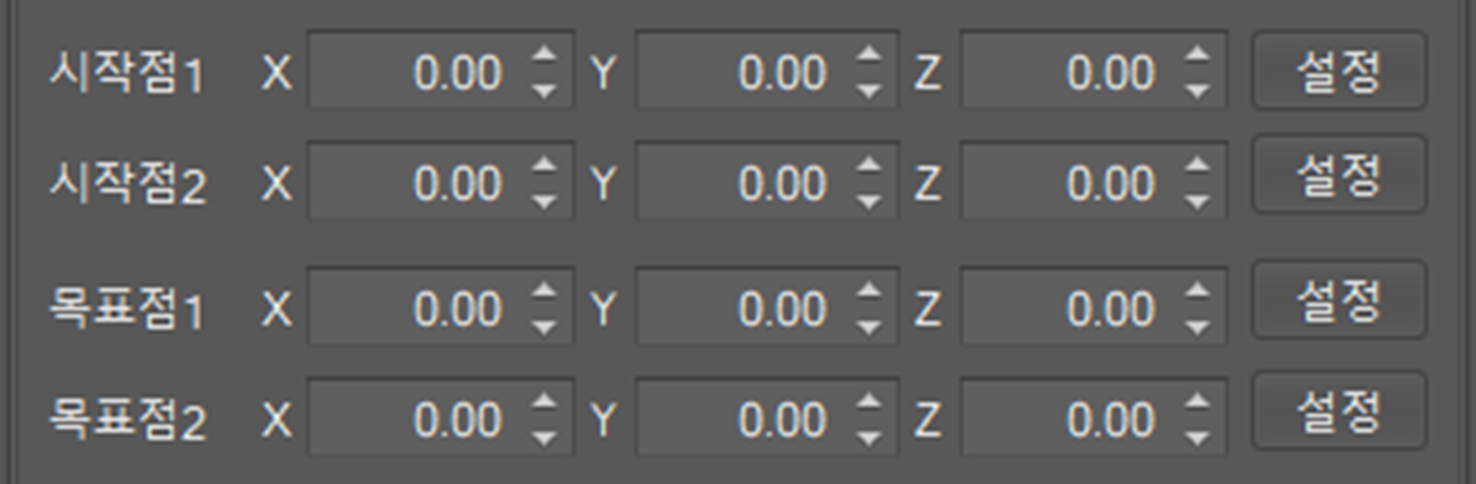
시작 직선의 두 점과 목표 직선의 두 점을 설정합니다.
-
이동할 개체를 선택합니다.
-
이동 기능을 실행합니다.
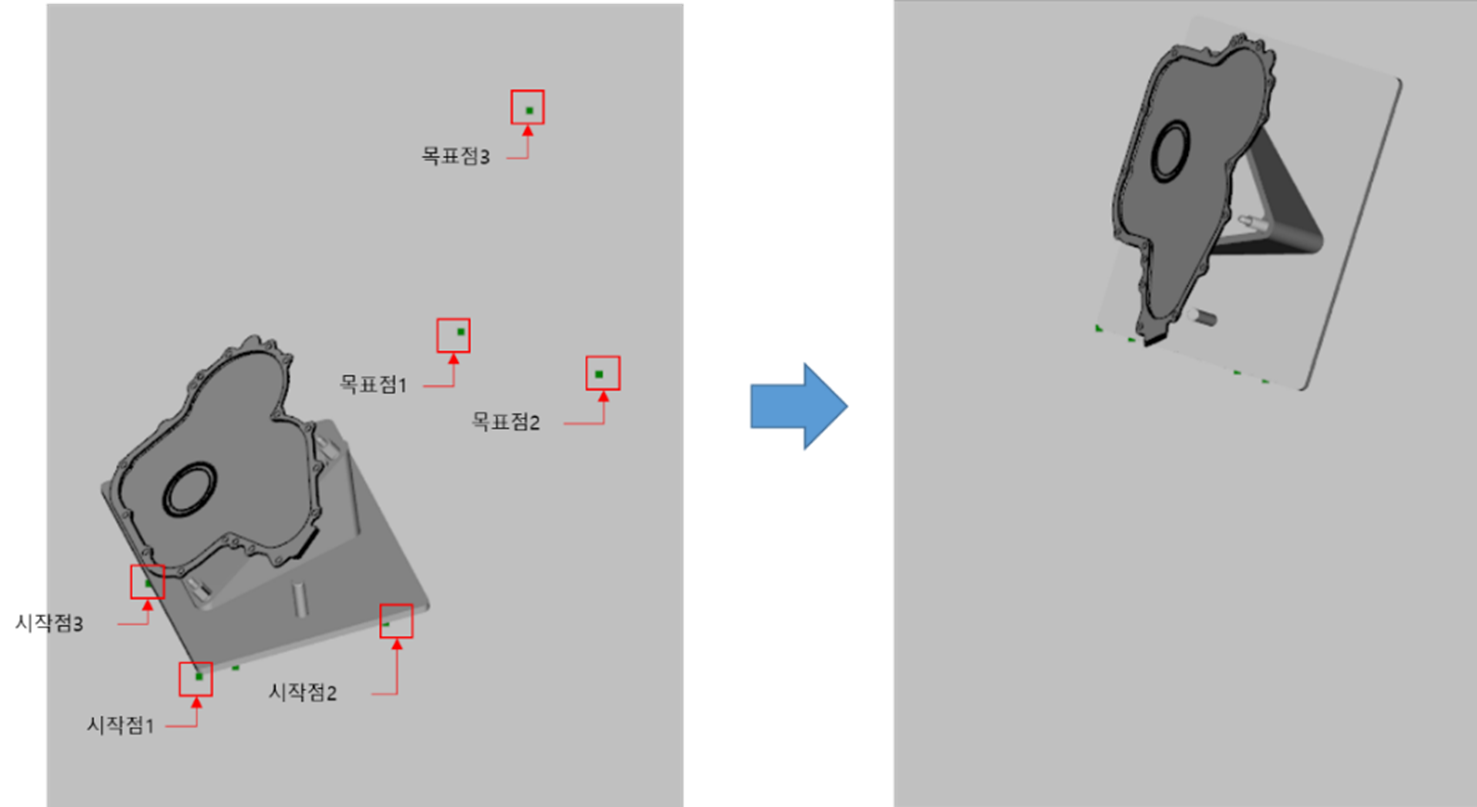
평면 대 평면 정합
시작 평면을 목표 평면으로 이동하는 변환을 생성하고, 선택된 개체에 변환을 적용합니다.
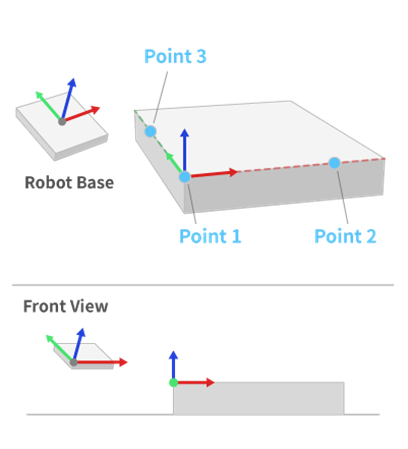
이 함수는 3개의 점이 평면을 구성한다고 가정합니다.
-
첫 번째 점이 평면의 원점을 결정합니다.
-
두 번째 점은 평면의 주축을 결정합니다.
-
세 번째 점은 평면의 법선 방향을 결정합니다.
평면을 결정하기 위해 세 점(원점, 정렬축 결정점, 평면 결정점)이 필요합니다. 변환이 적용되면 시작 평면의 원점이 목표 평면의 원점으로 이동하고, 두 면의 법선과 정렬축이 일치하게 됩니다.
평면 대 평면 정합 기능은 물체가 XY평면이 아닌 기울어진 평면에 놓인 경우에 사용합니다.
-
메뉴에서 개체 정합 버튼을 클릭하십시오.
-
활성창에서 평면 대 평면 정합 옵션을 선택합니다.
-
시작 평면의 세 점과 목표 평면의 세 점을 설정합니다.
-
이동할 개체를 선택합니다.
-
이동 기능을 실행합니다.
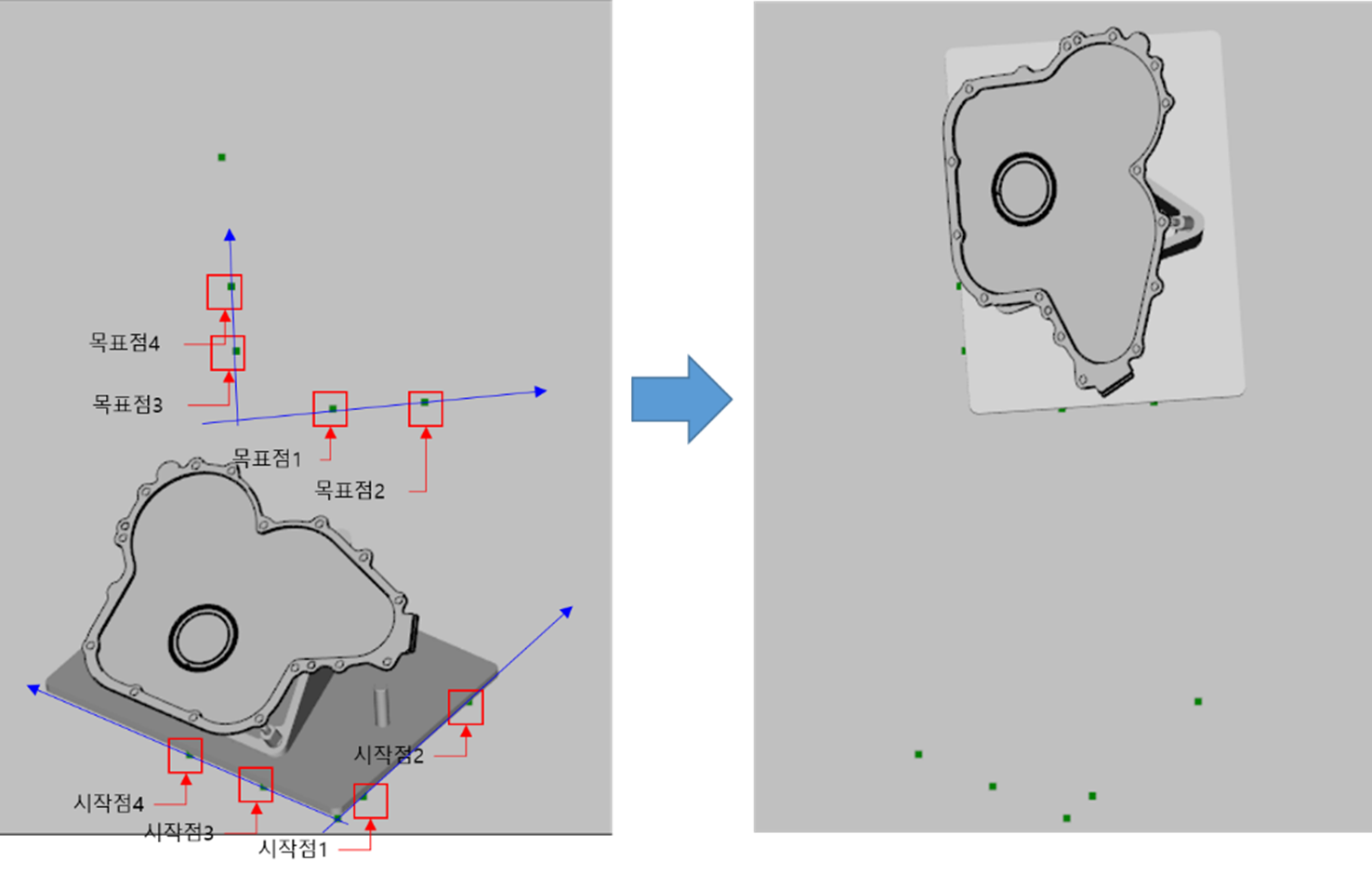
평면 대 평면 정합(2직선)
이 기능은 4개의 점이 평면을 구성한다고 가정한다는 점을 제외하고는 [평면 대 평면 정합]과 동일한 기능을 제공합니다.
-
첫 번째 점과 두 번째 점은 하나의 선(라인 1)을 구성합니다.
-
세 번째 점과 네 번째 점은 선을 구성합니다(라인 2).
-
선 1은 평면의 주축을 결정합니다.
-
선 1과 선 2의 곱은 평면의 법선 방향을 결정합니다.
-
선 1과 선 2의 교점이 평면의 원점을 결정합니다.
-
메뉴에서 개체 정합 버튼을 클릭하십시오.
-
활성창에서 평면 대 평면 정합(2직선) 옵션을 선택합니다.
-
시작 평면의 네 점과 목표 평면의 네 점을 설정합니다.
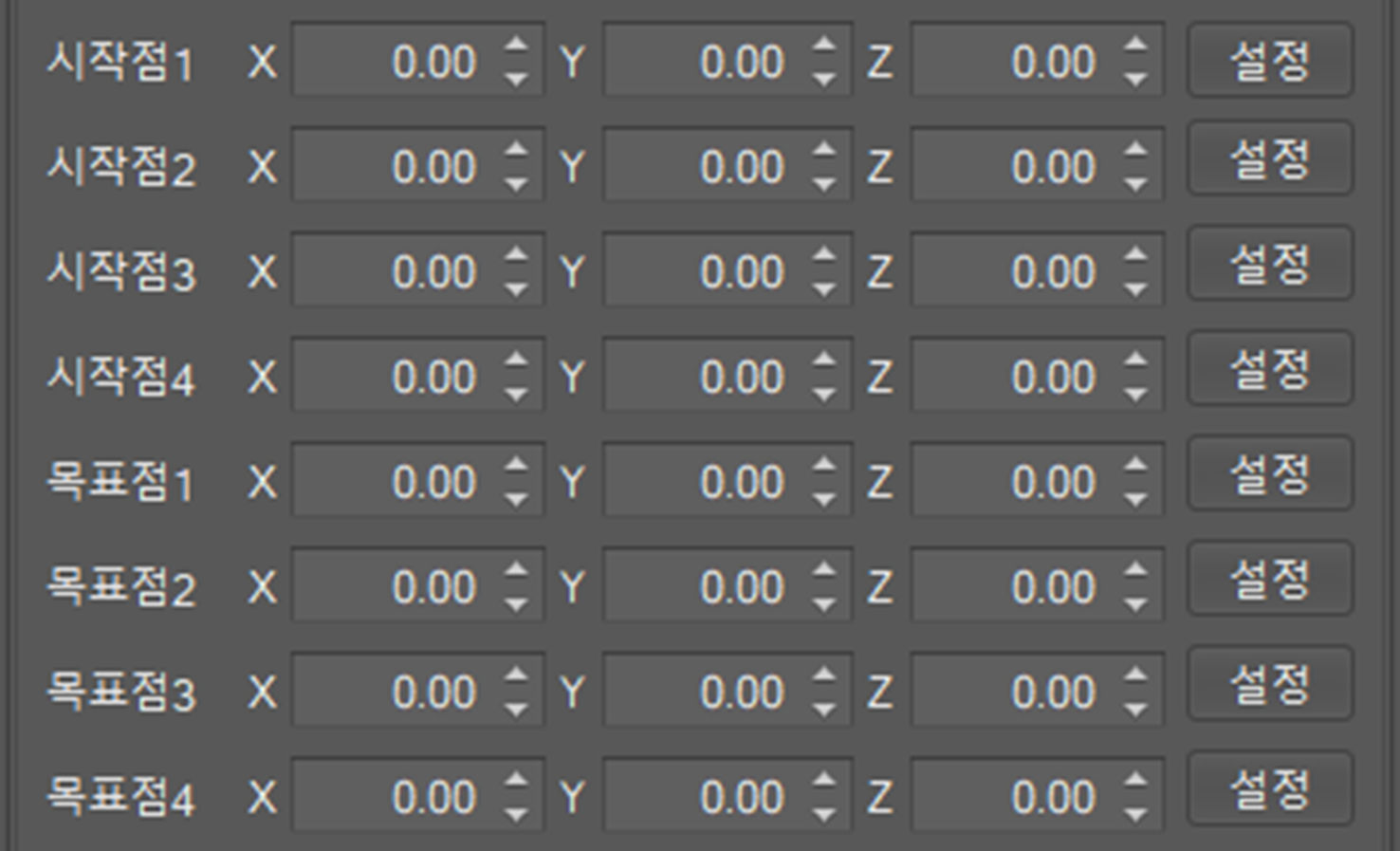
-
이동할 개체를 선택합니다.
-
이동 기능을 실행합니다.
점군 대 점군 정합
시작 점군을 목표 점군으로 최소한의 오차로 정합하는 변환 행렬 생성 기능을 제공한다.
-
메뉴에서 개체 정합 버튼을 클릭하십시오.
-
활성창에서 점군 대 점군 정합 옵션을 선택합니다.
-
시작 점군과 목표 점군을 설정합니다.
시작 점군의 수와 목표 점군의 수가 일치하지 않아도 됩니다. 단, 각 점군은 세 점 이상이 선택되어야 합니다.
-
허용 오차를 설정합니다.
오차란 매칭되는 점 간의 거리를 의미합니다. 허용 오차란 두 점군의 정합 기준을 의미합니다.

-
역행렬 생성 여부를 설정합니다.

기본적으로 생성되는 변환 행렬 외에 추가적으로 목표 점군에서 시작 점군으로 정합하는 행렬을 생성합니다. 역 변환 행렬은 “행렬이름_역행렬”로 명명됩니다. -
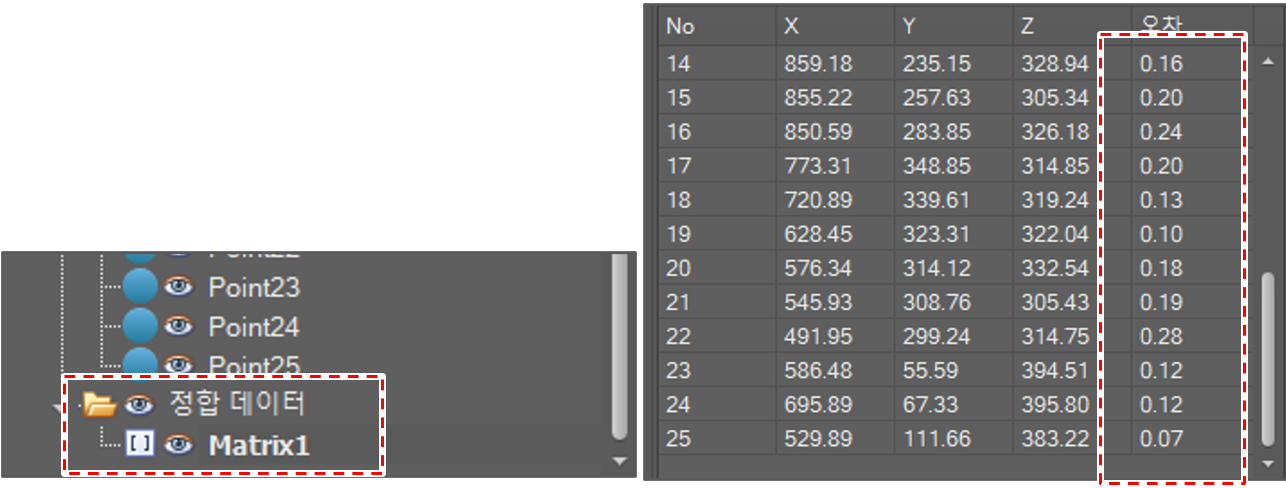
행렬 이름을 입력하고 행렬 생성 기능을 실행합니다.

기능을 실행하면, 변환 행렬이 생성되고 시작 점군에 변환을 적용하였을 때의 목표 점군과의 오차를 표시합니다. 사용자는 오차 수준을 확인하여 생성된 행렬을 사용할 것인지를 평가해야 합니다. 만약 오차 수준이 크다면 대응되는 점군을 새로 설정하거나 점을 추가해야 합니다.
생성된 행렬 적용하기
-
정합 행렬을 선택하세요.
행렬 개체가 생성되면 정합 행렬 리스트가 갱신됩니다. 목록에서 변환을 적용할 행렬을 선택하십시오. -
이동 데이터 그룹을 선택하세요.
이동할 데이터 그룹을 선택하세요. 변환이 적용되면 선택한 데이터 그룹 전체가 변환됩니다. -
변환을 실행합니다.
점군 대 곡선 정합
시작 점군을 목표 곡선으로 최소한의 오차로 정합하는 변환 행렬 생성 기능을 제공한다.
정합 대상이 곡선으로 변경된 것 외에는 점군 대 점군 정합과 동일합니다. 기능에 대한 설명은 점군 대 점군 정합을 참고바랍니다.
점군 대 곡면 정합
시작 점군을 목표 곡면으로 최소한의 오차로 정합하는 변환 행렬 생성 기능을 제공한다.
정합 대상이 곡선으로 변경된 것 외에는 점군 대 점군 정합과 동일합니다. 기능에 대한 설명은 점군 대 점군 정합을 참고바랍니다.