일정한 배치로 대상물을 배치할 수 있는 거치대의 일종입니다.
-
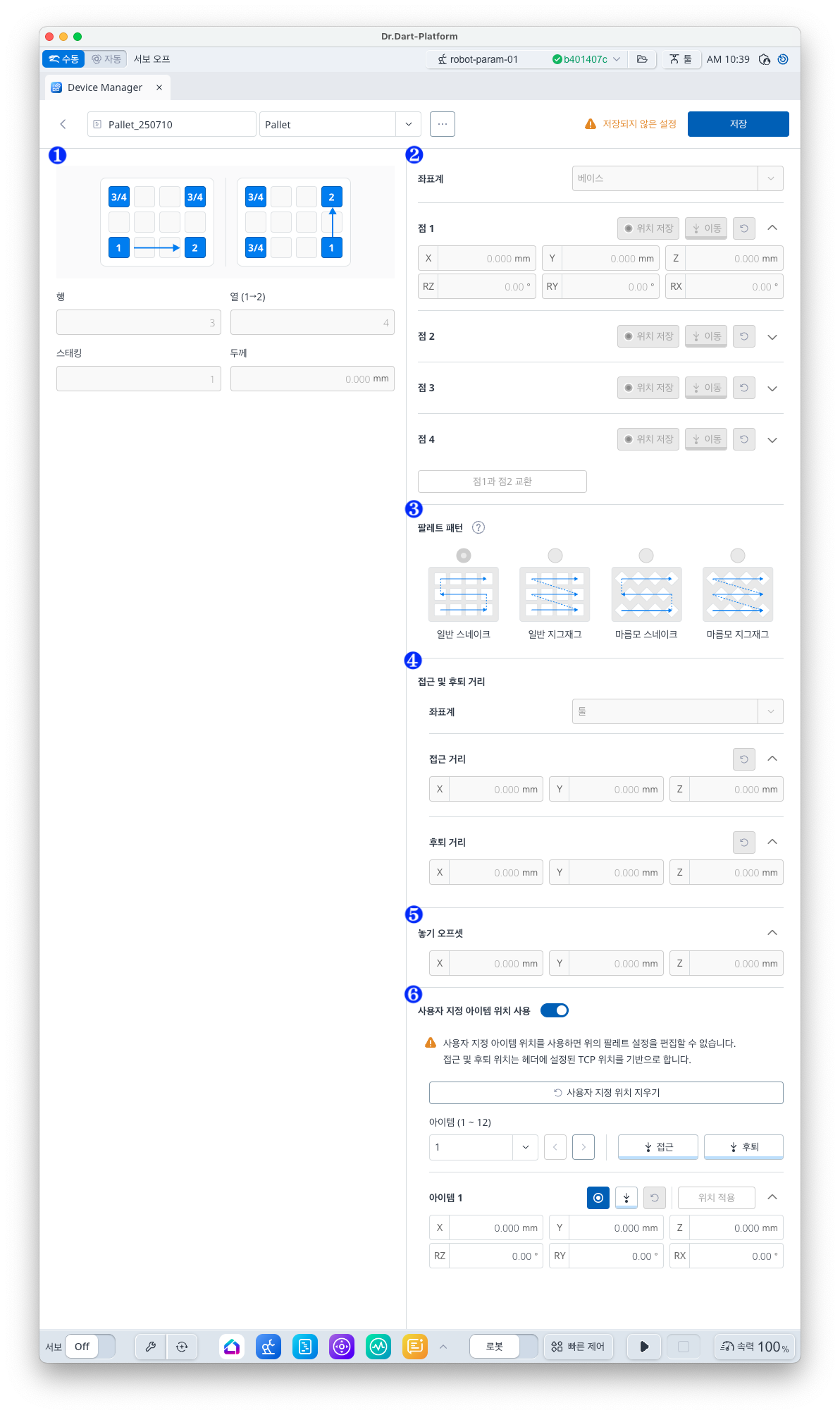
최소한의 위치(4점) 교시로 팔렛트의 모든 대상물을 핸들링할 수 있습니다.
-
행과 열과 함께 층과 두께를 입력하여 팔렛트에 있는 작업물을 순차적으로 접근 할 수 있습니다.
|
항목 |
설명 |
|
|---|---|---|
|
1 |
팔레트 행렬/층/두께 |
팔레트의 행/열/층의 개수 및 층 높이를 입력합니다.
|
|
2 |
포즈 저장 |
팔레트의 기준 좌표계를 선택하고 기준 포인트를 저장합니다.
|
|
3 |
팔레트 패턴 |
로봇이 이동하는 패턴을 선택합니다
|
|
4 |
접근/후퇴 거리 |
접근/후퇴 거리를 툴기준으로 x, y, z 값을 입력합니다. 일반적으로 z방향으로 100mm 후퇴를 위해서는 0, 0, -100이 입력되어야 합니다. |
|
5 |
놓기 오프셋 |
저장된 4개의 위치 기반으로 생성된 포인트들에 적용할 오프셋값을 입력합니다.
|
|
6 |
사용자 지정 아이템 위치 사용 |
[사용자 지정 아이템 위치 사용] 를 사용하여 생성된 팔레트 포인트를 확인하거나, 위치를 임의로 변경할 수 있습니다. [사용자 지정 위치 지우기] 버튼: 모든 커스텀 위치 정보를 초기화할 수 있습니다.
아이템 필드에 값을 입력하거나 목록에서 선택하여,
|




