주의
본 기능은 P시리즈 로봇에서 사용할 수 없습니다.
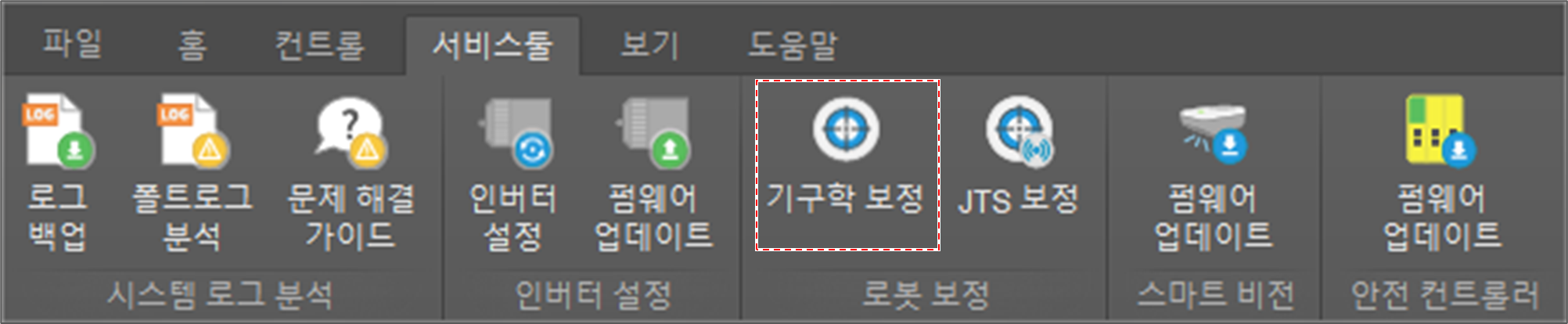
기구학 보정을 하려면 메인 메뉴에서 서비스 툴을 선택한 후 로봇 보정->기구학 보정 버튼을 클릭하십시오.
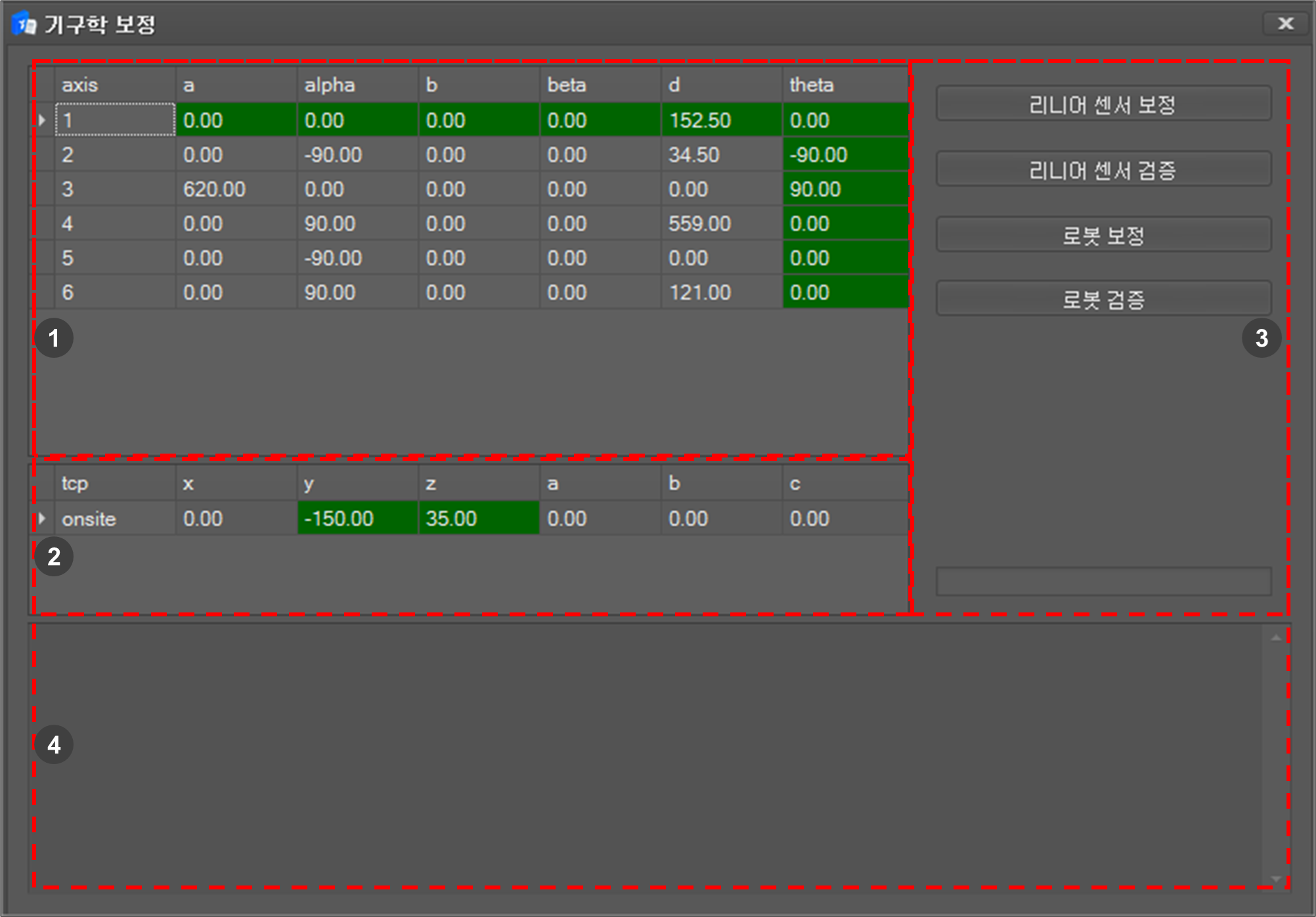
기구학 보정 창이 아래와 같이 나타납니다.
|
➊ |
DH 파라미터 |
각 축의 운동 파라미터를 설명합니다. |
|
➋ |
툴 파라미터 |
툴 중심 위치 값을 의미합니다. |
|
➌ |
현장 보정 탭 |
보정을 위한 4개의 메뉴로 구성되어 있습니다. |
|
➍ |
로그 창 |
보정 중에 생성된 메시지가 표시됩니다. |
![]()
로봇을 보정하려면 다음 4가지 절차가 필요합니다.
-
리니어 센서 보정
-
리니어 센서 검증
-
로봇 보정
-
로봇 검증
리니어 센서 보정하기
리니어 센서 보정 기능은 현장 로봇 운동학적 교정에 사용되는 1차원 리니어 위치 센서를 교정합니다. 이 기능은 센서의 오프셋, 기울기 변수를 찾아 이 값을 저장합니다. 이 전에 컴퓨터에서 이 작업을 수행한 적이 없다면 이 작업을 수행해야만 합니다.
보정을 시작하려면,
-
현장 보정(OnSite Calibration) 탭에서 리니어 센서 보정 메뉴를 선택하십시오.
-
첫 번째 메시지는 교정 절차가 시작될 것임을 알려줍니다. 준비가 되면 OK버튼을 클릭하십시오.
-
다음 메시지는 리니어 위치 센서에서 특정 길이의 막대를 삽입하라는 메시지를 표시합니다. 막대를 삽입한 후 OK 버튼을 클릭하십시오.
-
여러 막대 길이에 대해 이 단계를 반복해야 합니다.
-
-
측정이 완료되면 OK 버튼을 클릭하십시오.
-
OK 버튼을 누르지 않으면 결과는 저장되지 않습니다.
-
리니어 센서 검증하기
리니어 센서 검증 기능은 리니어 위치 센서가 제대로 보정되어 있는지 확인합니다. 전체 절차는 적은 시간 동안 측정한다는 점을 제외하고 리니어 센서 교정 기능과 동일합니다.
검증을 시작하려면,
-
현장 보정(OnSite Calibration) 탭에서 리니어 센서 검증 메뉴를 선택하십시오.
-
첫 번째 메시지는 유효성 검사 절차가 시작될 것임을 알려줍니다. 준비가 되면 OK 버튼을 클릭하십시오.
-
다음 메시지는 리니어 위치 센서에 특정 길이의 보정 막대를 삽입하라는 메시지를 표시합니다. 막대를 삽입하고 OK 버튼을 클릭하십시오.
-
이 단계를 여러 번 반복해야 합니다.
-
-
유효성 검사에 성공하면 다음 메시지가 표시됩니다.
-
유효성 검사에 실패하면 오류 메시지가 표시됩니다. 이 경우 리니어 센서 보정 절차를 다시 수행해야 합니다.
로봇 보정하기
로봇 보정 기능은 현장 보정 도구 상자를 사용하여 운동학적 보정을 수행합니다.
보정을 시작하려면,
-
현장 보정(OnSite Calibration) 탭에서 로봇 보정 메뉴를 선택하십시오.
-
첫 번째 메시지는 로봇이 초기 위치로 이동한다는 것을 알려줍니다. OK 버튼을 클릭하십시오.
-
로봇이 초기 위치로 이동한 후 센서를 중앙 자석 홀더(번호 1이 플레이트에 조각)와 로봇 엔드 이펙터에 부착하라는 메시지가 나옵니다. 준비되었으면 OK 버튼을 클릭하십시오.
-
로봇이 첫 번째 자석 홀더 주의를 이동한 후 센서 하단을 다음 홀더로 이동하라는 메시지가 나옵니다. 준비되었으면 OK 버튼을 누릅니다.
-
5개의 자석 홀더에서 이 단계를 반복해야 합니다.
-
-
보정에 성공하면 다음 메시지가 표시됩니다. 로봇에 이 결과를 반영하려면 예 버튼을 클릭하십시오.
-
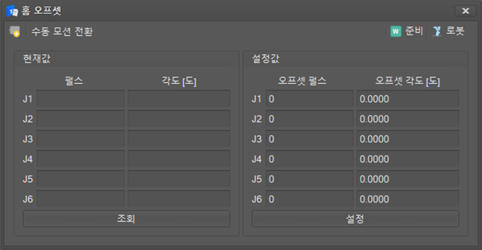
아래와 같은 설정 창이 팝업 되며 설정 버튼을 클릭하면 보정 결과가 업데이트 됩니다.
업데이트 완료 후 시스템을 재 부팅 하라는 메시지가 표시됩니다.
-
보정이 실패하면 실패를 알려줍니다.
-
보정을 다시 시도하려면 리니어 센서 교정부터 절차를 다시 시작하십시오.
로봇 검증하기
로봇 검증 기능은 로봇의 보정 상태를 점검합니다. 엔드 이펙터 위치를 고정하는 동안 방향이 변경됩니다. 보정이 제대로 이루어지지 않으면 이동하는 동안 엔드 이펙터 위치가 변경됩니다.
검증 절차를 시작하려면,
-
현장 보정(OnSite Calibration) 탭에서 로봇 검증 메뉴를 선택하십시오.
-
첫 번째 메시지는 로봇이 움직일 것임을 알려줍니다. 확인 버튼을 클릭하십시오.
-
로봇이 초기 위치로 이동한 후 센서를 첫 번째 자석 홀더 및 로봇 엔드 이펙터에 부착하라는 메시지가 나옵니다. 준비되었으면 확인 버튼을 클릭하십시오.
-
로봇이 여러 번 움직인 후 결과가 나타납니다.