-
停止距離は、停止信号が生成された瞬間から、すべてのマニピュレータが操作を停止する瞬間までの移動角度である。
-
停止時間は、停止信号が生成された瞬間から、すべてのマニピュレータの操作を停止する瞬間までの時間である。
-
移動距離が大きいジョイント1、ジョイント2、ジョイント3について、停止距離と停止時間のデータが提供されている。
-
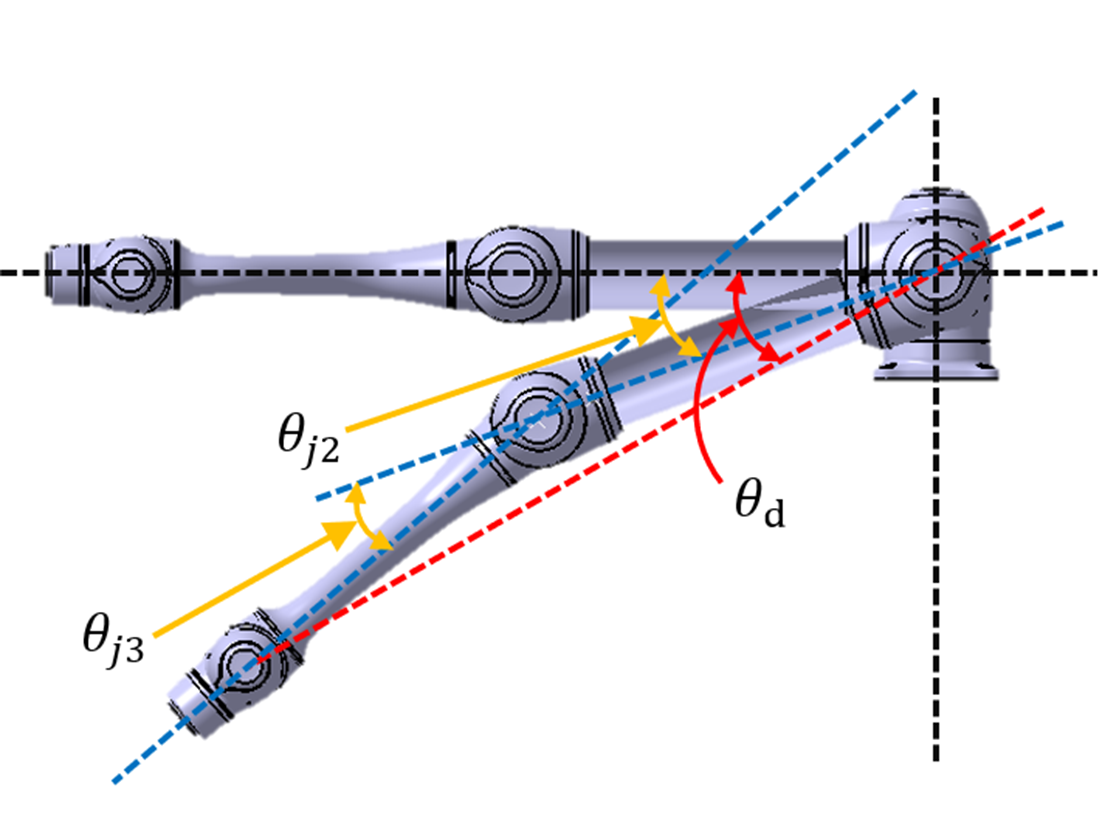
重なり合った軸の移動により、停止距離が長くなることがある。
-
停止距離と停止時間のデータはKS B ISO 10218-1:2011 Declaration and Certificationに従って定義されている。 宣言と認証.
停止カテゴリ
|
停止カテゴリ |
概要 |
|
|---|---|---|
|
1 |
停止カテゴリ0 |
ジョイント1(ベース)、 ジョイント2(ショルダー)、ジョイント 3(エルボ)の停止距離と停止時間は、 最大速度、ストレッチレベル、および荷重で測定される。 ジョイント2 と ジョイント3の軸は 互いに平行であるため、一方のパーツに強制停止による衝撃が反対側のスリップを引き起こす可能性がある。角度偏差も測定した。 |
|
2 |
停止カテゴリ1 |
ジョイント1(ベース)とジョイント2(ショルダー)の停止距離と停止時間は, 最大速度,ストレッチレベル及び荷重のそれぞれ33%,66%及び100%で測定した。 ジョイント3(エルボ)の停止距離と停止時間は、 最大速度と負荷の33%,666%および100%で測定される。 ジョイント3 測定中の伸張レベルは、ロアアームの長さと完全に平らな手首のために最大でロックされる。 |
測定のポーズと条件
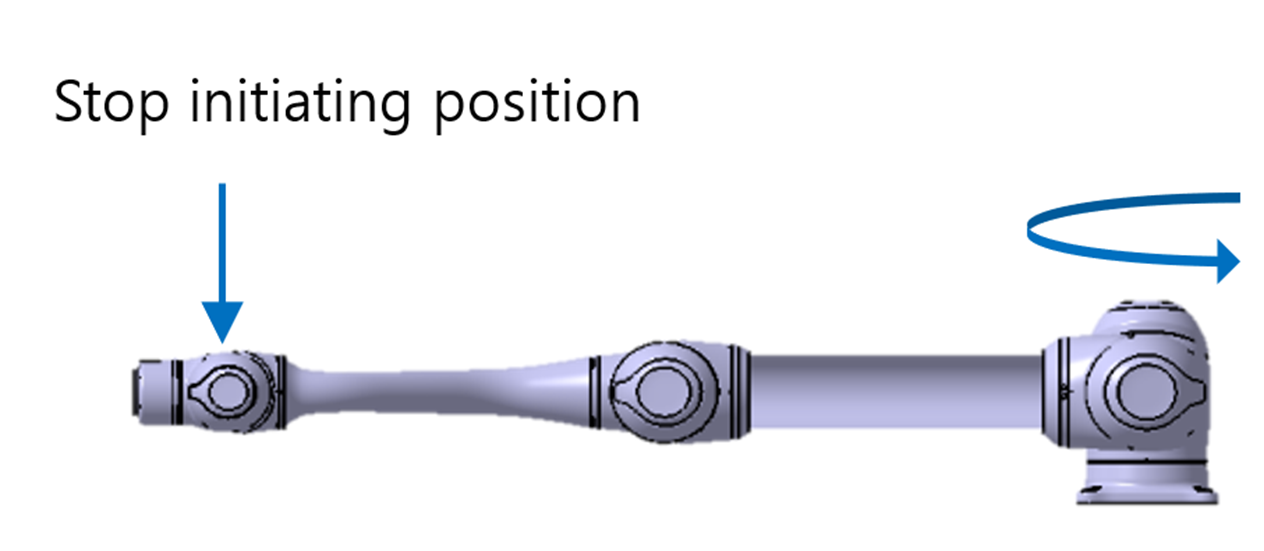
ジョイント1の測定は回転軸を地面に垂直にして水平移動中に行う。
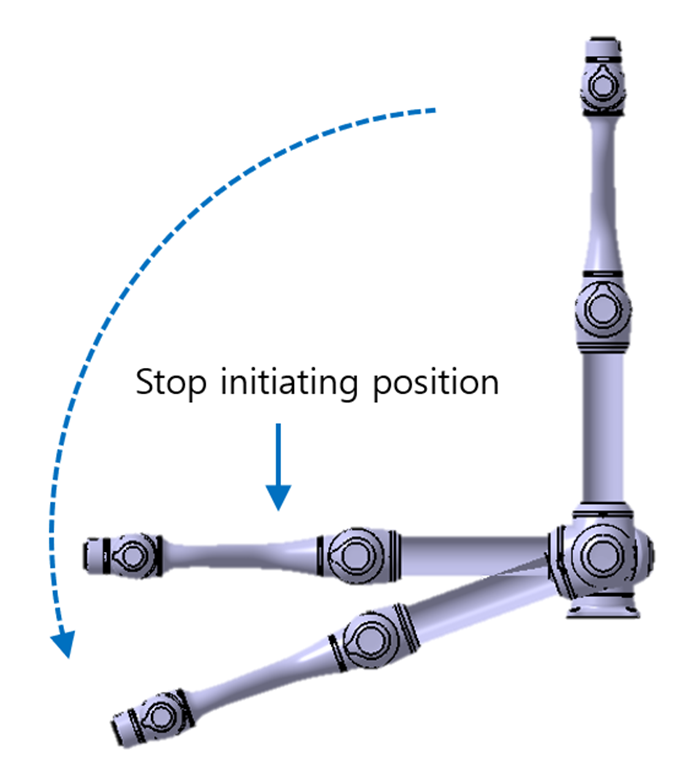
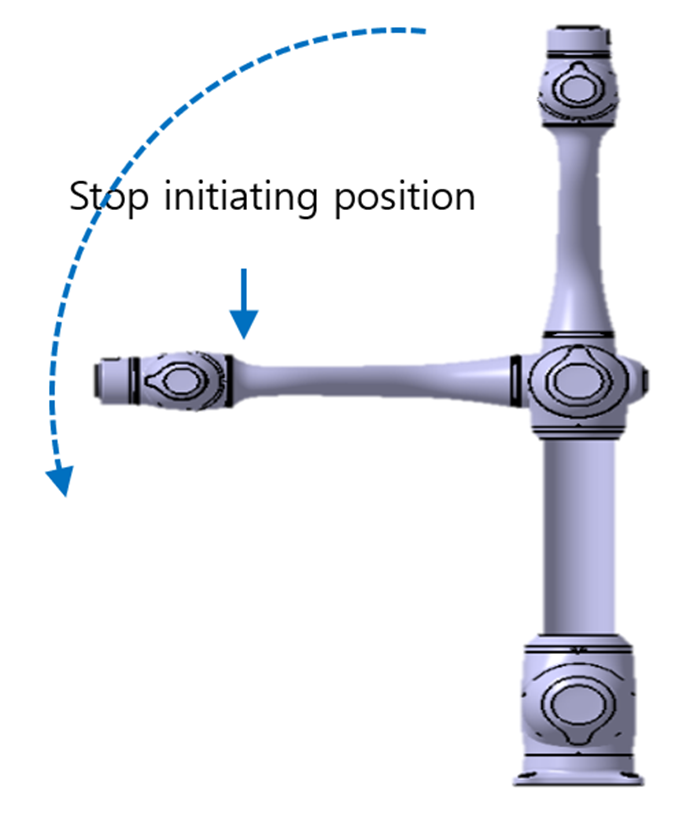
ジョイント2とジョイント3の測定は、回転軸を地面に平行にし、ロボットが地面に垂直に下向きに移動して停止したときに行う。
注釈
測定値は最悪の場合の結果である。状況によって測定値が異なる場合がある
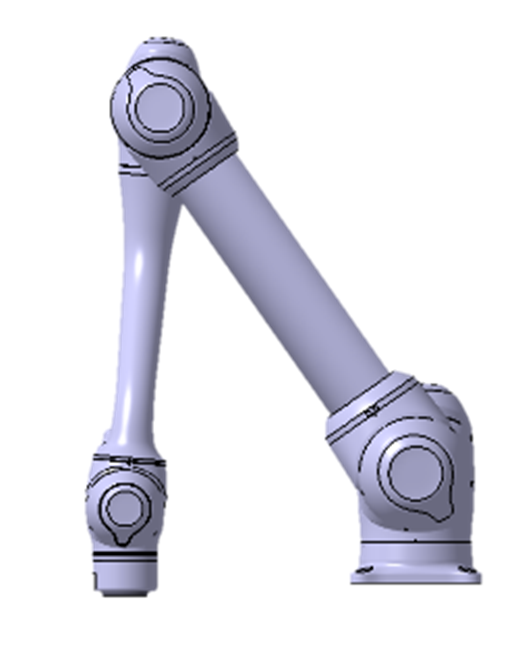
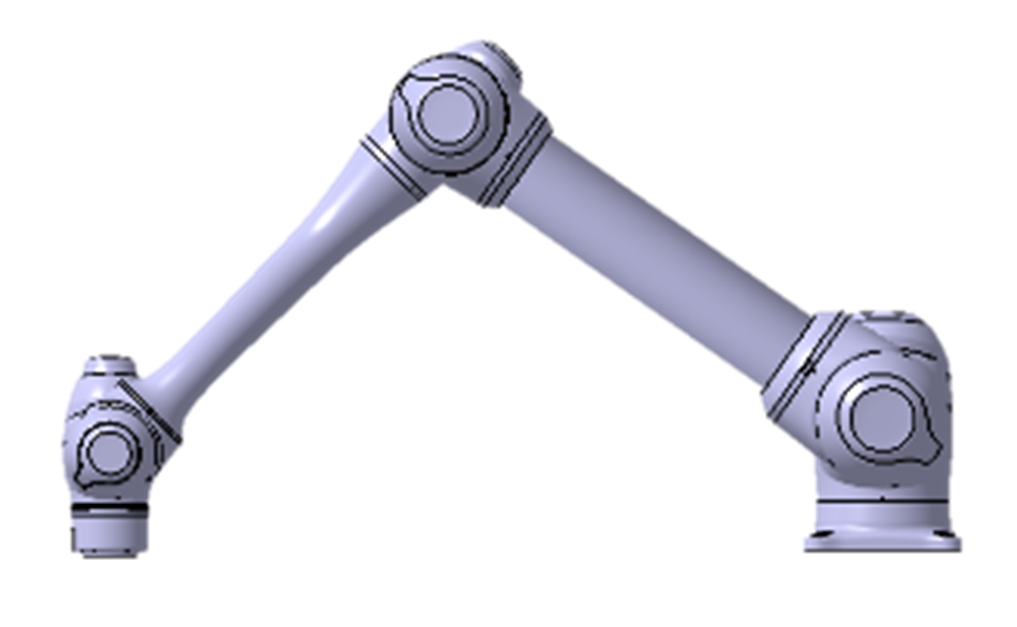
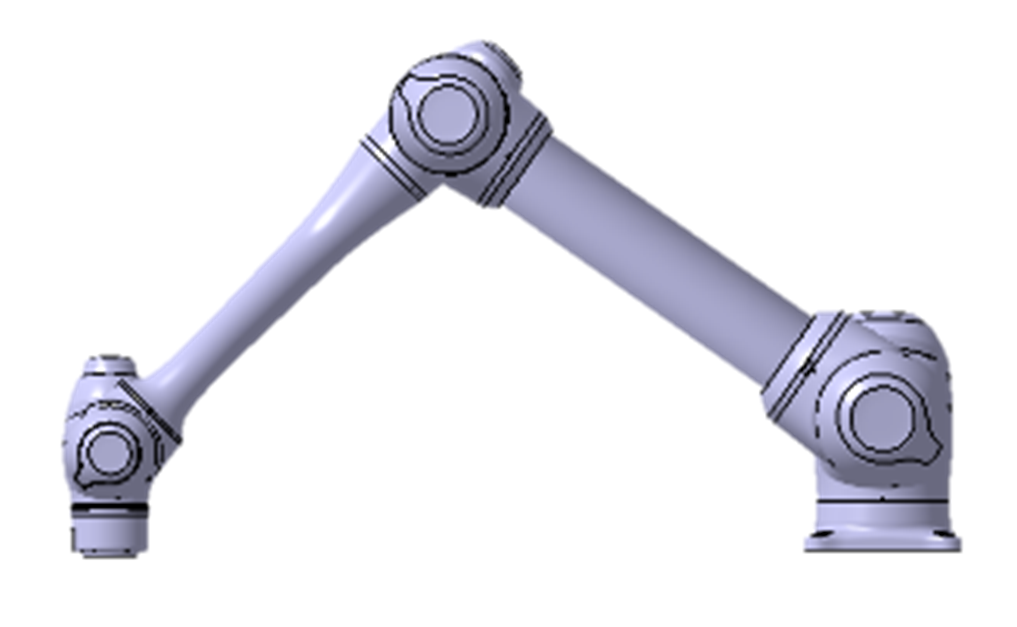
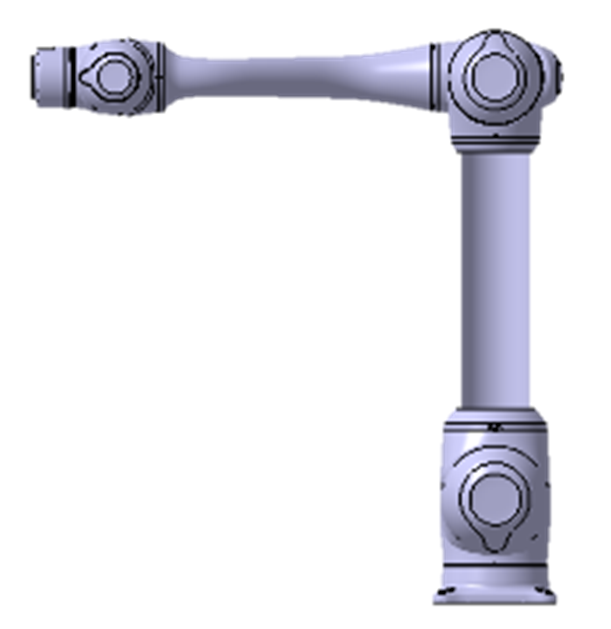
伸展の33%、66%、100%のポーズ
|
|
ジョイント1 |
ジョイント2 |
ジョイント3 |
|
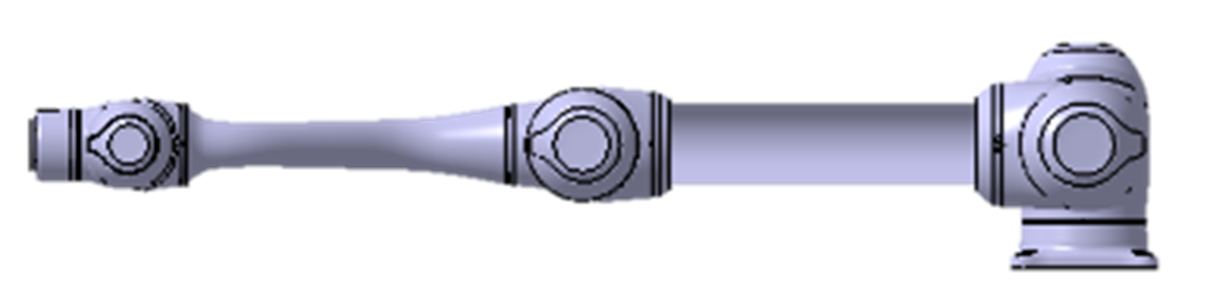
100%延長 停止カテゴリ0 |
|
|
|
|
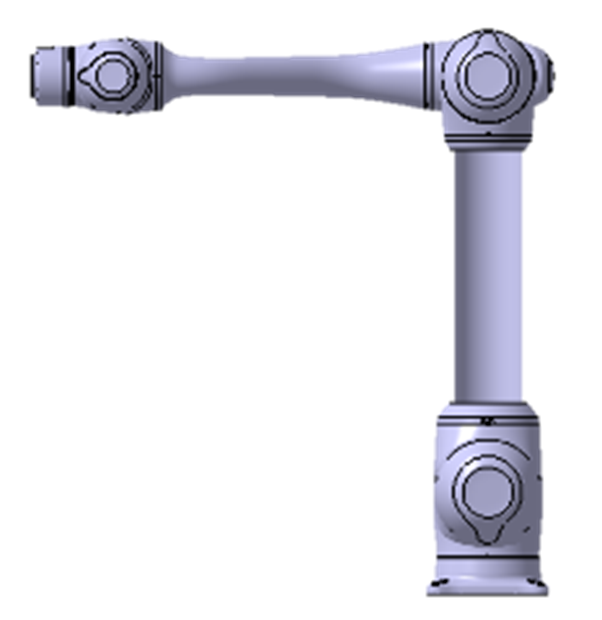
33%伸長 停止カテゴリ1 |
|
|
- |
|
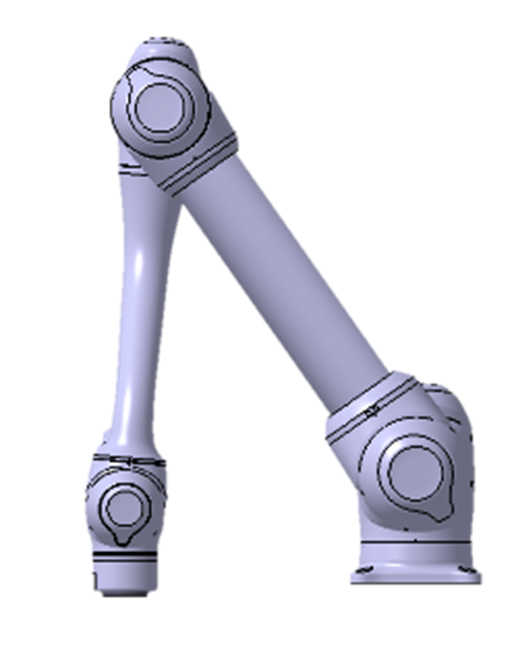
66%の延長 停止カテゴリ1 |
|
|
- |
|
100%延長 停止カテゴリ1 |

|

|
|
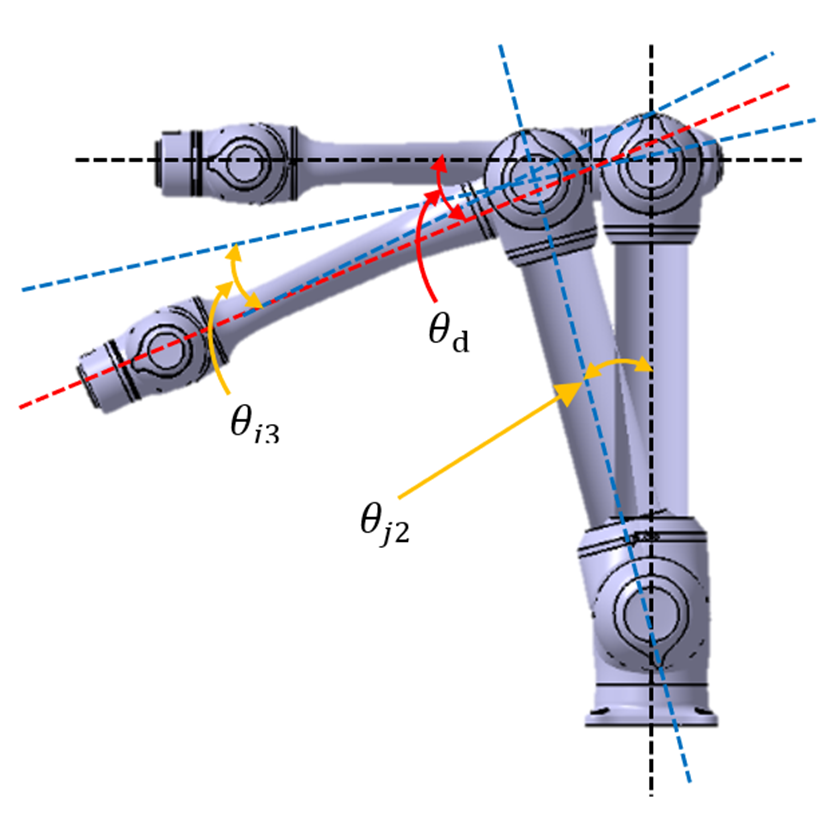
停止が開始されたときのポーズと測定された角度(θd))
|
|
停止が開始されたときのポーズ |
測定された角度 |
|
Joint1
|
|
スリップなし、 |
|
結合2 |
|
|
|
joint3 |
|
|