コントローラの電源を入れる
必須 簡単 1分
-
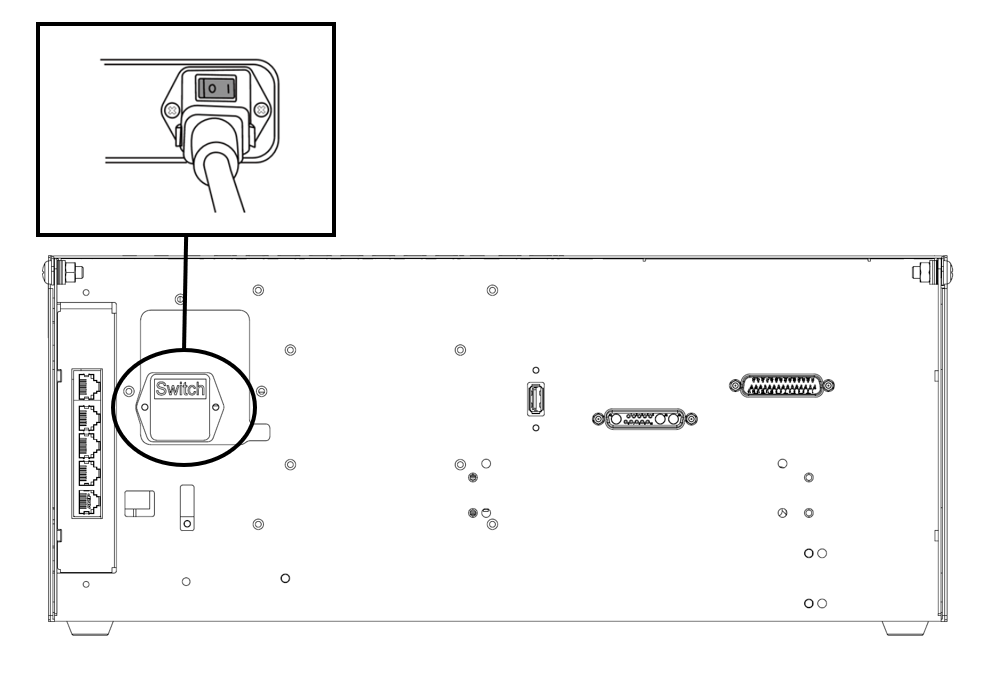
コントローラの下部にある電源スイッチを押す。ロボット、コントローラ、ティーチペンダントなどのシステムの電源がオンになっている。
-
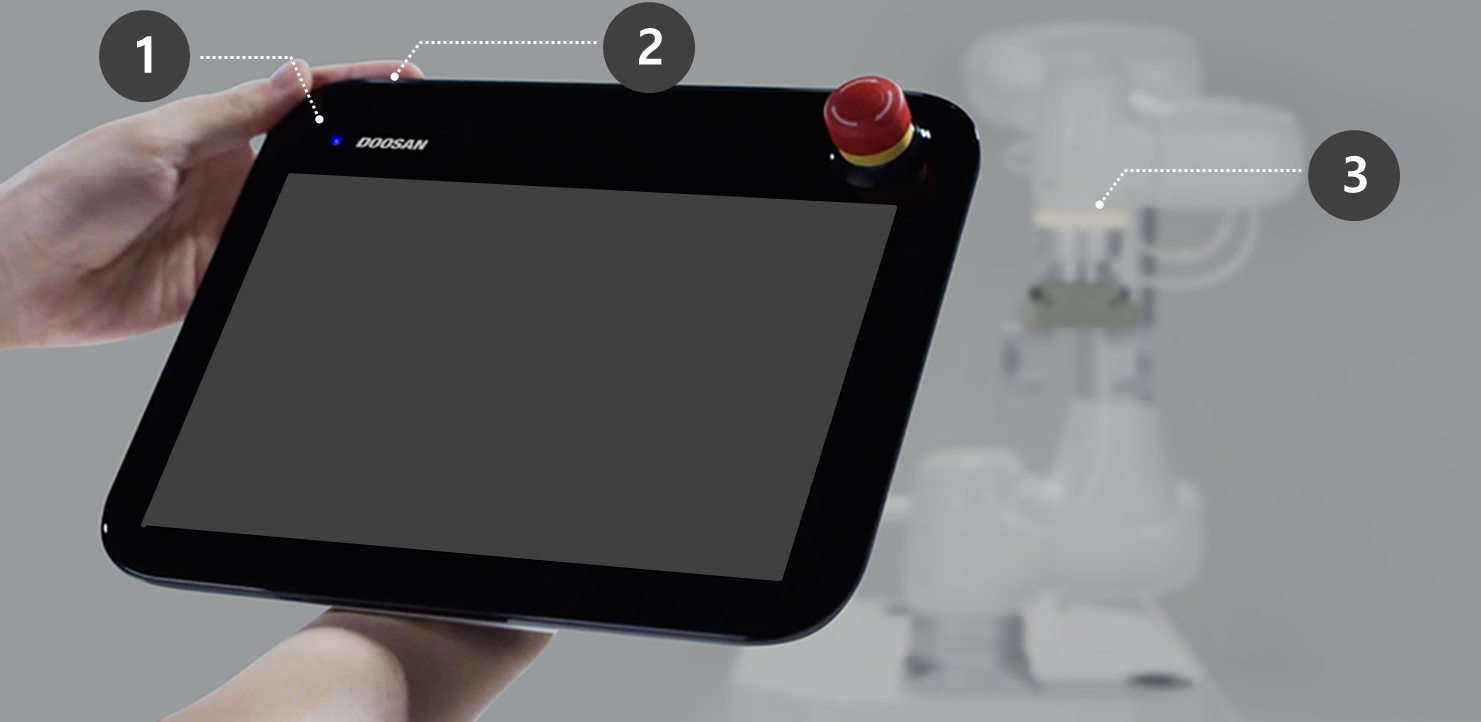
ティーチペンダント画面に電源が入るまで、電源ボタン(図2)を押したままにするティーチペンダントLED (図1)とフランジLED (図3)は、ロボットコントローラがネットワークに接続されるまで赤く点滅する。
論
論
-
ティーチペンダント以外の機器の詳細については、「 システム電源オン/オフ」を参照。.
注釈
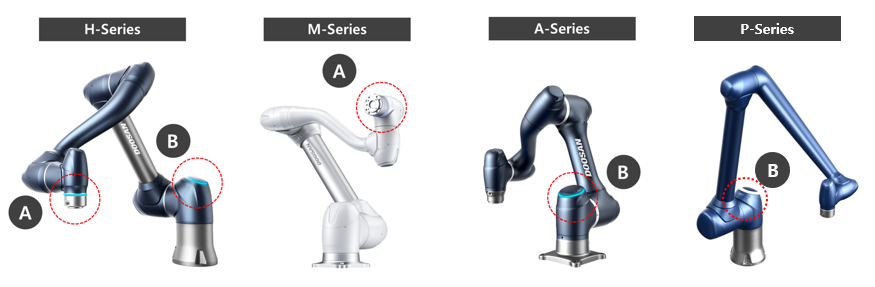
斗山ロボティクスの各ロボットシリーズのLEDの位置は以下の通りである。
-
A:フランジLED
-
B:軸1 LED
緊急停止ボタンを解除する
必須 簡単 1分
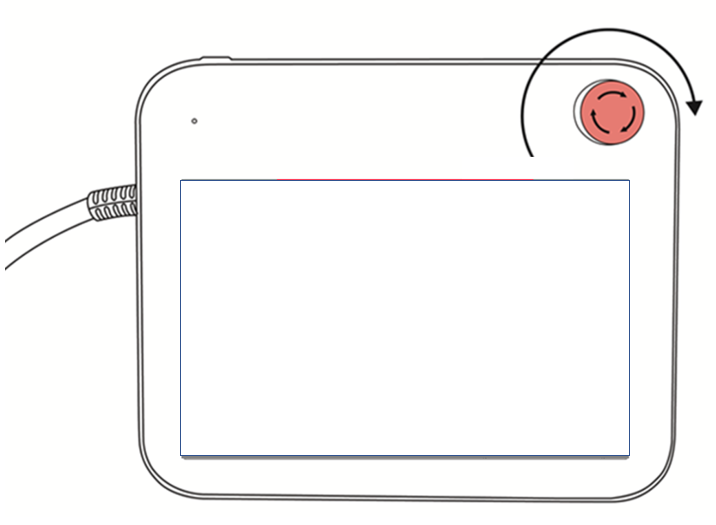
ロボットの設置後および最初のシステム起動後、ティーチペンダントの緊急停止ボタンを押したときに警告ポップアップが表示される。ロボットを操作するには、緊急停止ボタンを解除する必要がある。
-
緊急停止ボタンを時計回りに回して、緊急停止状態を解除する。
パッケージポーズを外す
必須 簡単 3分
ロボットは、輸送や梱包を容易にするために、梱包ポーズをとっている。ロボットを使用するためには、包装ポーズを解除する必要がある。梱包ポーズ中にロボットがジョイント角度制限を超えるポーズを維持するため、安全制限違反のためにサーボをオンにすることはできない。この状態でロボットLEDが赤色に点灯する。
注釈
移動のためにロボットをパッケージ化する必要がある場合は、パッケージモードでパッケージングポーズで移動を使用してパッケージポーズを設定する。
Unknown Attachment
|
項目s |
概要 |
|
|---|---|---|
|
1 |
モデル名 |
接続されたロボットモデルの名前が表示される。 |
|
2 |
梱包/開梱 |
パックまたはアンパックのいずれかを選択できる。 |
|
3 |
梱包ポーズ/ジョイント制限 |
ポーズとジョイントの制限値が表示される。 |
|
4 |
速度比 |
パックまたはアンパックモードの速度はスライダーまたは入力によって調整することができる。 |
パッケージングポーズを設定するプロセスは次のとおりである。
-
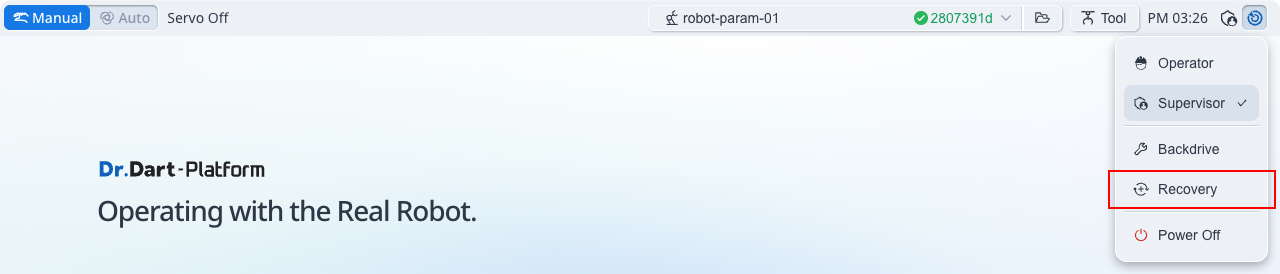
ヘッダーペインの[回復]メニューをタップする。.
-
[パッケージングモード(Packaging Mode)] タブを選択する。

-
サーボオンをタップしてリカバリを開始 ボタンを押してパッケージングモードを有効にする。

-
ロボットは自動的に設定された梱包ポーズに移動する。
-
[パック(Pack)] ボタンを使用するとロボットを[パック(Pack)]位置に配置でき、[パック 解除(Unpack)] ボタンを使用すると、ロボットをデフォルトの[ホーム位置(Home Position)]に配置できる。
-
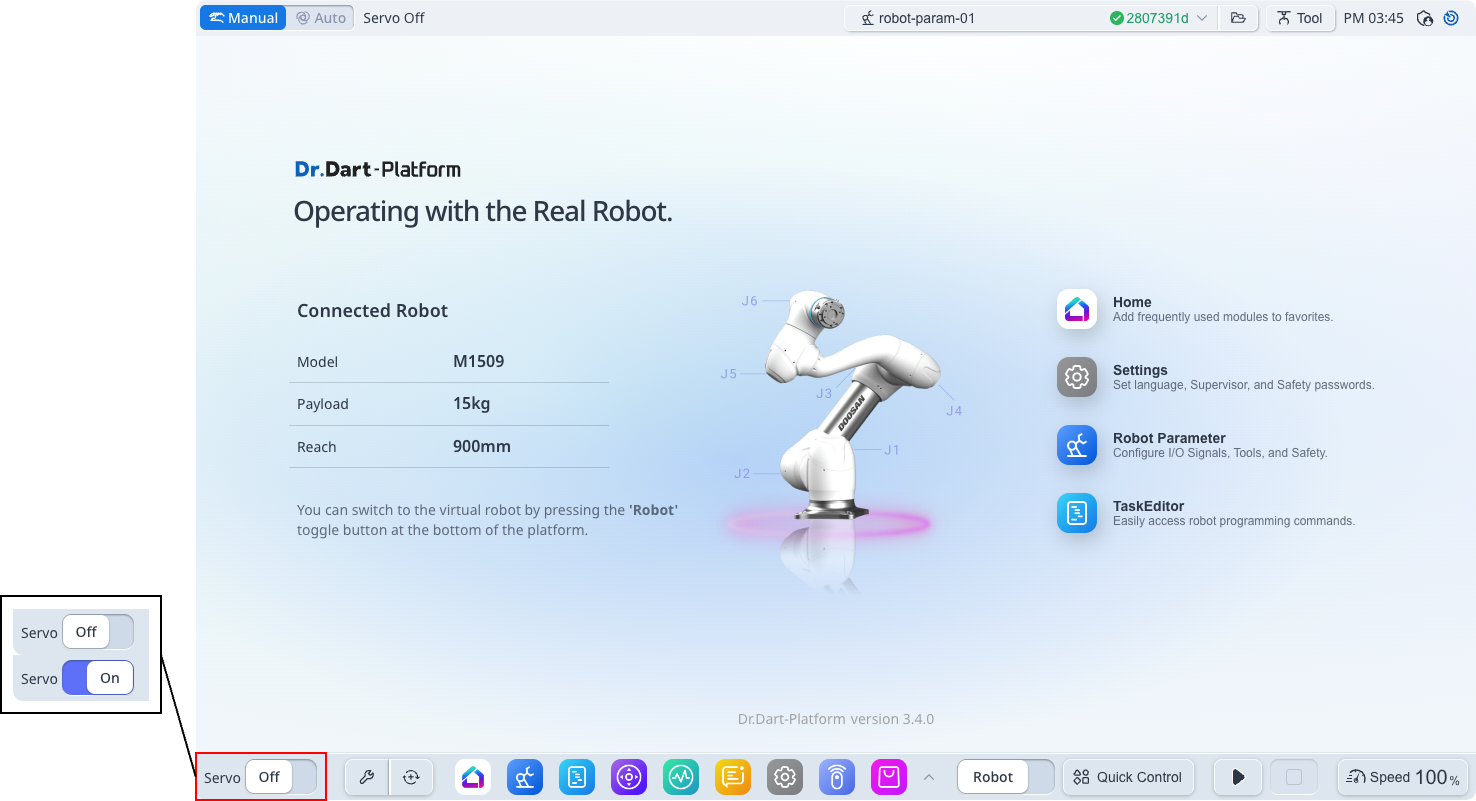
サーボオフ
必須 簡単 1分
サーボオンの状態は、ロボットの姿勢を変更するためにロボットジョイントに電源が供給されている状態である。
サーボオフボタンを押してロボットジョイントに供給される電力を遮断し、ロボットを停止する。詳しくは、 のサーボの概要を参照のこと。.