월드 좌표계 설정
월드 좌표계를 사용하기 위해서는 월드 좌표계 항목을 선택한 후 툴 바에서 아이템 수정 ![]()
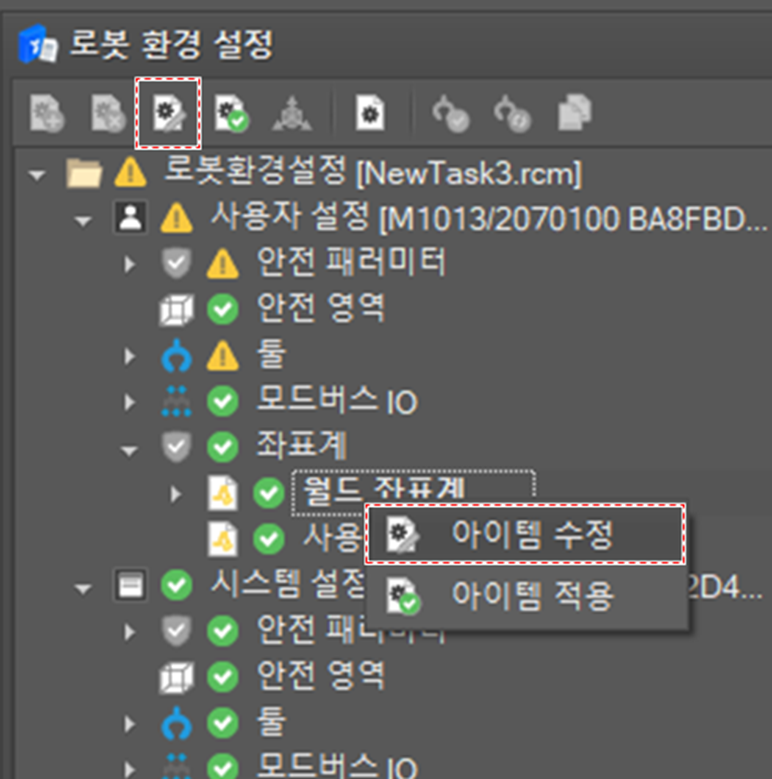
편집 창에서 월드-베이스 관계를 설정하십시오. 월드-베이스 관계란 월드 좌표계 상에서 로봇이 어떤 위치에 어떤 자세로 배치되어있는 지를 의미합니다.
|
항목 |
설명 |
|
X |
월드 좌표 계의 X 축 방향에서 로봇베이스의 상대 위치 좌표 |
|
Y |
월드 좌표 계의 Y 축 방향에서 로봇베이스의 상대 위치 좌표 |
|
Z |
월드 좌표 계의 Z 축 방향에서 로봇베이스의 상대 위치 좌표 |
|
RZ |
월드 좌표 계의 Z 축을 회전 축으로 하여 로봇베이스의 XY 좌표축의 각도 |
|
RY |
Y 축을 기준으로 회전 한 로봇베이스의 ZX 좌표축 각도 |
|
RX |
X 축을 기준으로 회전 한 로봇베이스의 YZ 좌표축 각도 |
사용자 좌표계 추가
사용자 좌표계를 추가하기 위해서는 툴 바에서 아이템 추가 ![]()
편집 창에서 다음의 속성을 설정한 후, 확정 버튼을 클릭하십시오.
|
항목 |
설명 |
|
좌표계 ID |
사용자 좌표계는 총 100개까지 설정이 가능하고, 1부터 100까지의 ID가 사전에 부여되어 있습니다. 좌표계를 정의할 ID를 선택하십시오. |
|
참조 좌표계 |
사용자 좌표계를 정의할 기저 좌표계를 월드 좌표계와 베이스 좌표계 중에서 선택하십시오. |
|
좌표계 설정 |
기저 좌표계 기준 사용자 좌표계의 원점과 축을 정의하십시오. X, Y, Z: 기저 좌표계 기준 사용자 좌표계의 원점 위치 RZ: 기저 좌표계의 Z 축을 회전 축으로 하여 사용자 좌표계 XY 좌표축의 각도 RY: Y 축을 기준으로 회전 한 로봇베이스의 ZX 좌표축 각도 RX: X 축을 기준으로 회전 한 로봇베이스의 YZ 좌표축 각도 |
사용자 좌표계 수정
사용자 좌표계의 속성을 편집하려면, 트리에서 항목을 선택한 후 툴 바에서 아이템 수정 ![]()

수정이 완료되면 확정 버튼을 클릭하십시오.
사용자 좌표계 삭제
사용자 좌표계를 삭제하려면 항목을 트리에서 선택한 후 툴 바에서 아이템 제거 ![]()