호밍 모션은 수동 모션 중 하나이지만 자주 사용되므로 자체 메뉴가 있습니다.
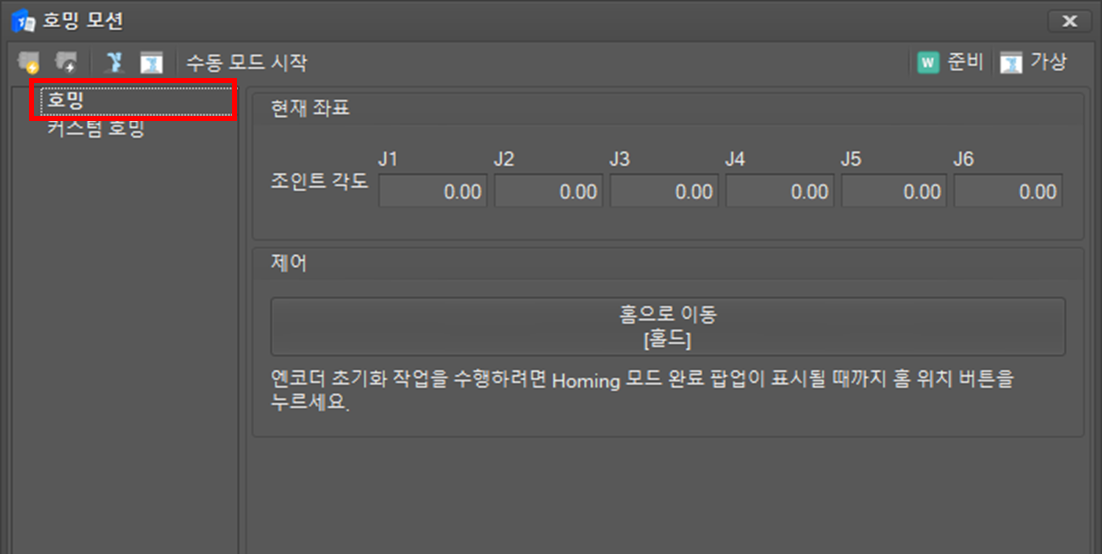
메인 메뉴에서 컨트롤을 선택한 후 호밍 버튼을 클릭하십시오.

호밍
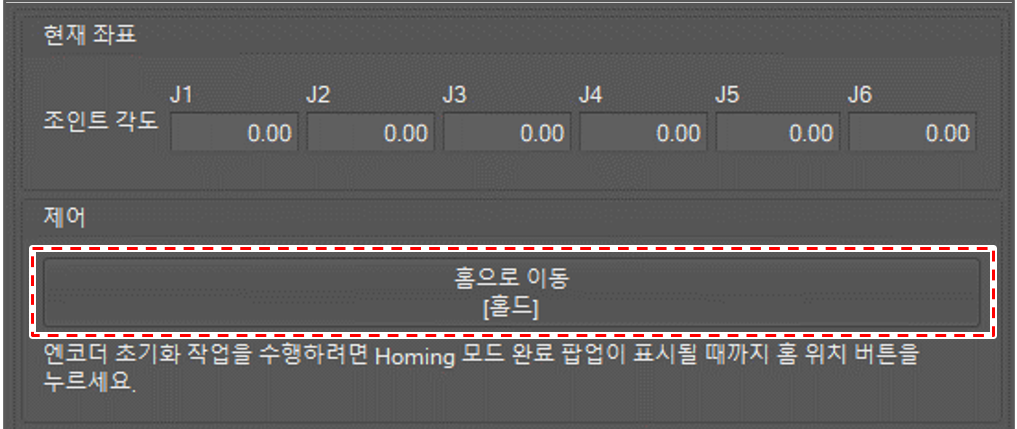
호밍 모션 목록에서 호밍을 선택하십시오. 현재 조인트 각도가 표시되며 100 밀리세컨드 간격으로 업데이트됩니다.
홈으로 이동 버튼을 클릭하면 로봇은 버튼을 놓을 때까지 홈 위치로 이동합니다.
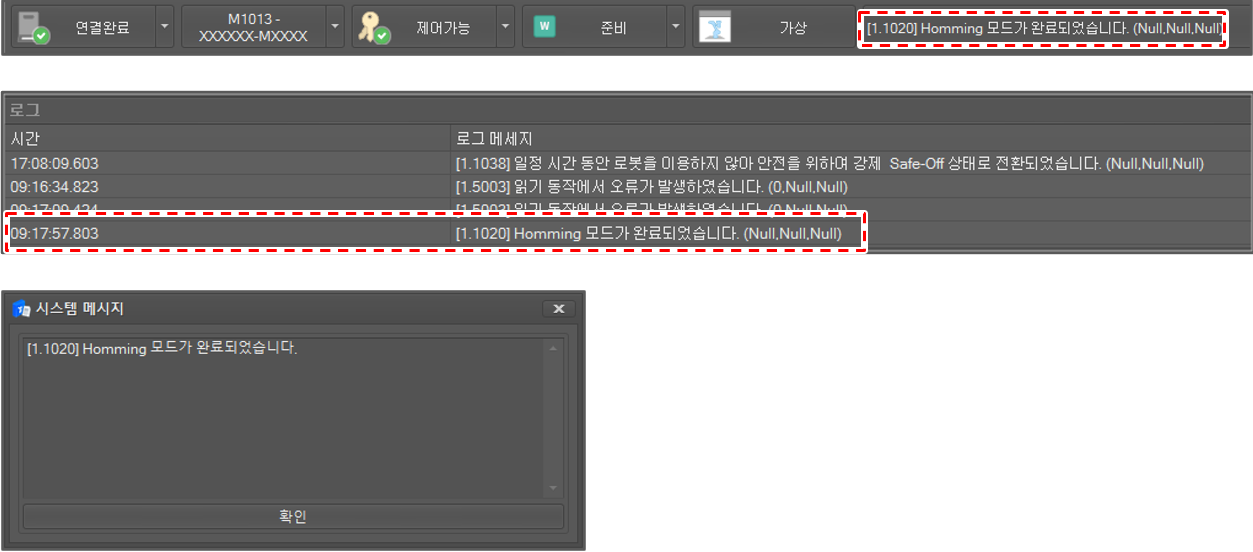
호밍이 완료되면 Homming 모드가 완료되었습니다. 라는 메시지가 모니터링 바의 메시지 영역이나 하단의 메시지 창에 나타납니다.
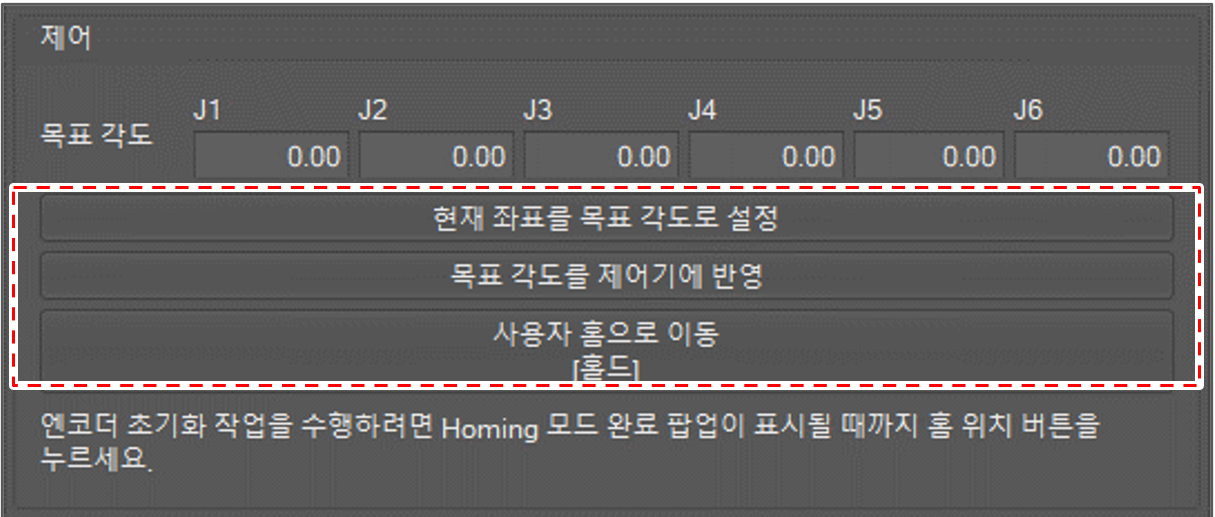
커스텀 호밍
호밍 모션 목록에서 커스텀 호밍을 선택하십시오. 현재 조인트 각도가 표시되며 100 밀리세컨드 간격으로 업데이트됩니다.
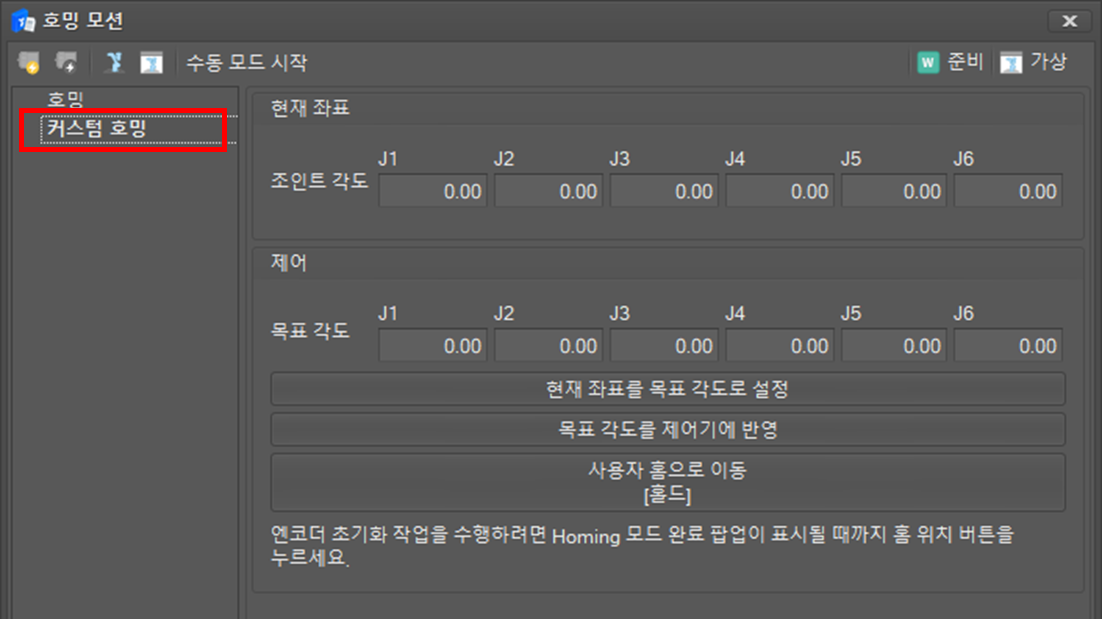
로봇의 현재 관절 각도를 커스텀 홈으로 설정하려면 다음과 같이 하십시오.
-
현재 좌표를 목표 각도로 설정 버튼을 클릭하여 현재 포즈를 커스텀 홈 위치로 설정합니다
-
목표 각도를 제어기에 반영 버튼을 클릭하여 제어기에 적용하십시오
-
사용자 홈으로 이동 버튼을 클릭 한 상태에서 버튼을 놓을 때까지 로봇이 커스텀 홈 위치로 이동합니다.
-
호밍이 완료되면 호밍 기능에서와 동일하게 모니터링 바 또는 메시지 창에 "Homing 모드가 완료 되었습니다." 라는 메시지가 표시됩니다.