Skip to main content
Manual PDF download
ROS 2 Docs.
API Docs.
Legacy manual
1.6
1.5
1.4
1.3
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Main navigation
Close navigation
1.6
1.5
1.4
1.3
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Main
Manual PDF download
ROS 2 Docs.
API Docs.
Legacy manual
Main
알아두기
퀵가이드
프로그램 구성
Dart-Bridge 프로그램
Dart-Bridge 모듈
Device Manager 모듈
Basic Devices 모듈
Basic, Pick & Place, Process 명령어 모듈
Conveyor 명령어 모듈
사용 전 주의사항
디바이스 설정 (Device Manager)
External Encoder 설정
Conveyor Tracker 설정
통신
컨베이어 좌표계
컨베이어 속도
명령어 설정 (Task Editor)
기타 참고 사항
Classic Welding 모듈
상세 가이드
Breadcrumbs
Home
Dart-Bridge Manual
프로그램 구성
Conveyor 명령어 모듈
디바이스 설정 (Device Manager)
On this Page
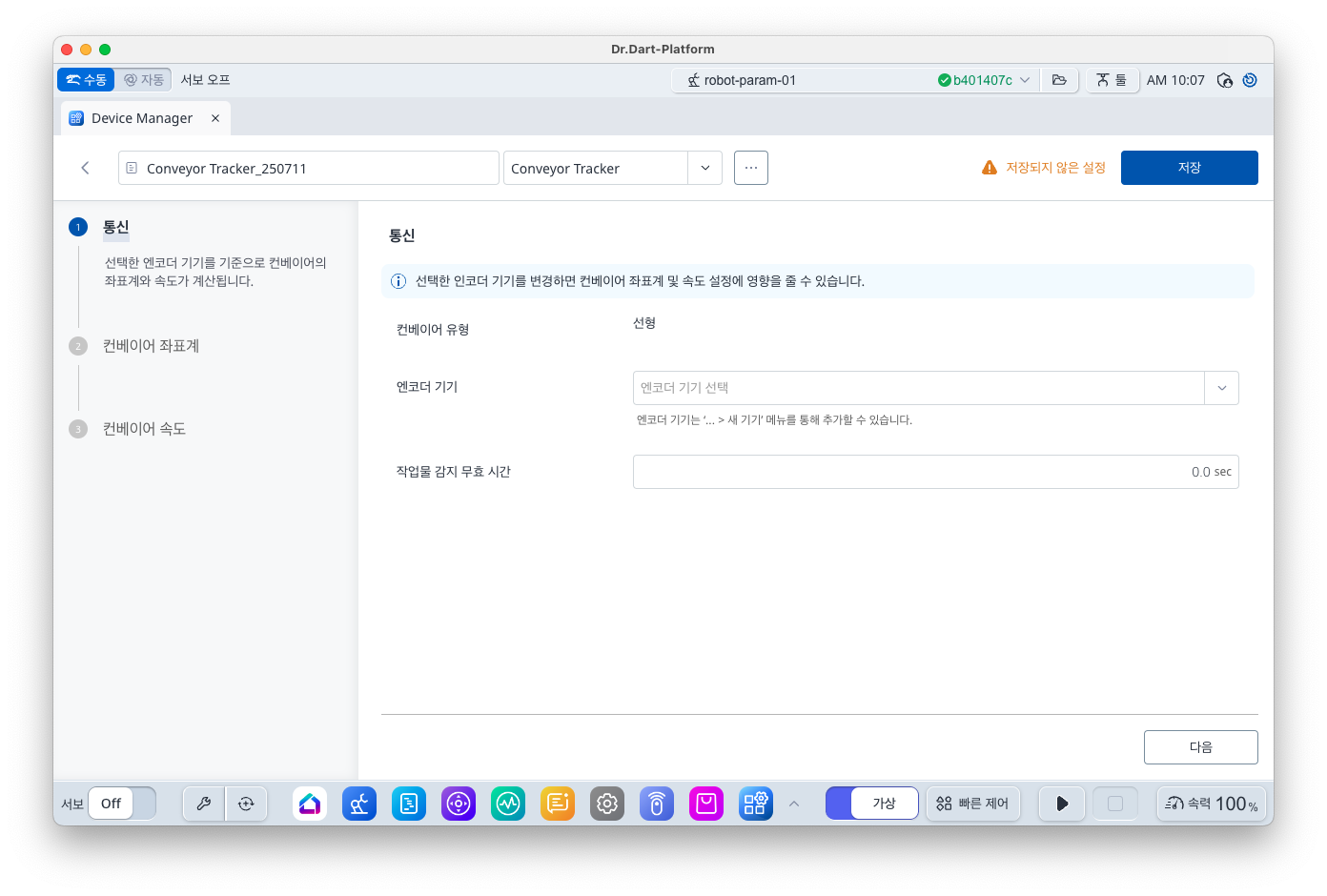
Conveyor Tracker 설정
[Conveyor Tracker]
디바이스는,
[통신]
→
[컨베이어 좌표계]
→
[컨베이어 속도]
순서로 순차적으로 설정합니다.