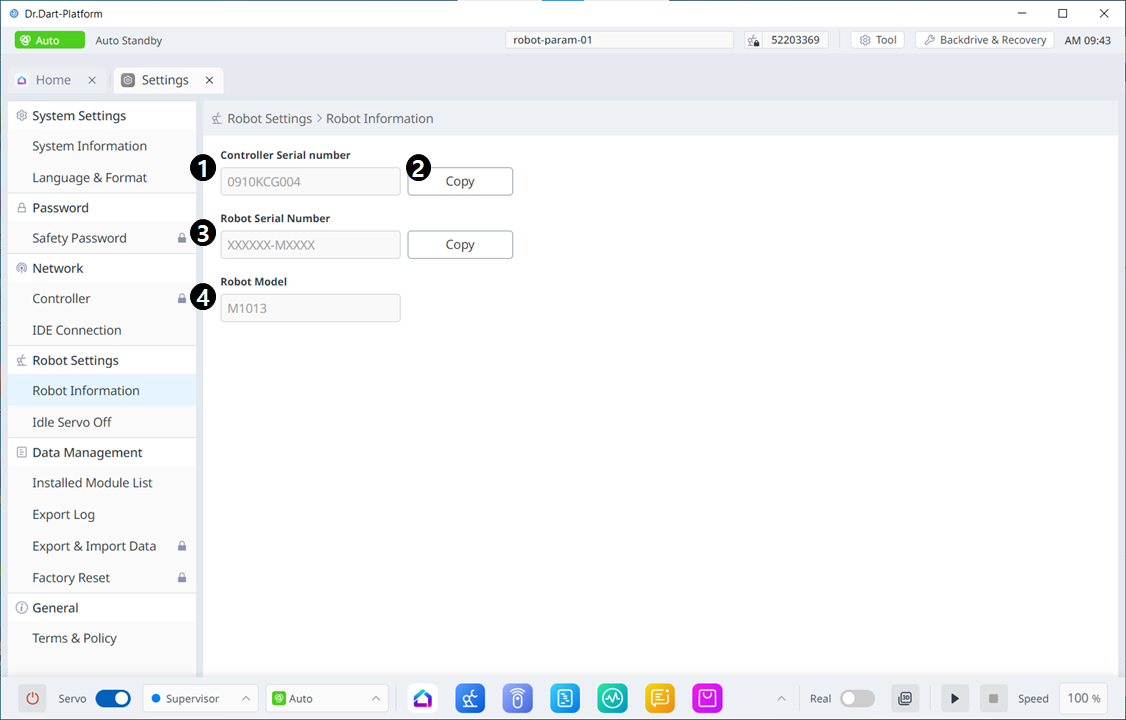
ロボット情報を設定する
メニュー
|
項目s |
概要 |
|
|---|---|---|
|
1 |
コントローラのシリアル番号 |
コントローラのシリアル番号が表示される場所 |
|
2 |
コントローラのシリアル番号をコピー |
このボタンを使用すると、シリアル番号をコピーすることができる。 |
|
3 |
ロボットシリアル番号 |
ここにロボットのシリアル番号が見える。 |
|
4 |
ロボットモデル |
ここにロボットのモデル名が見える。 |
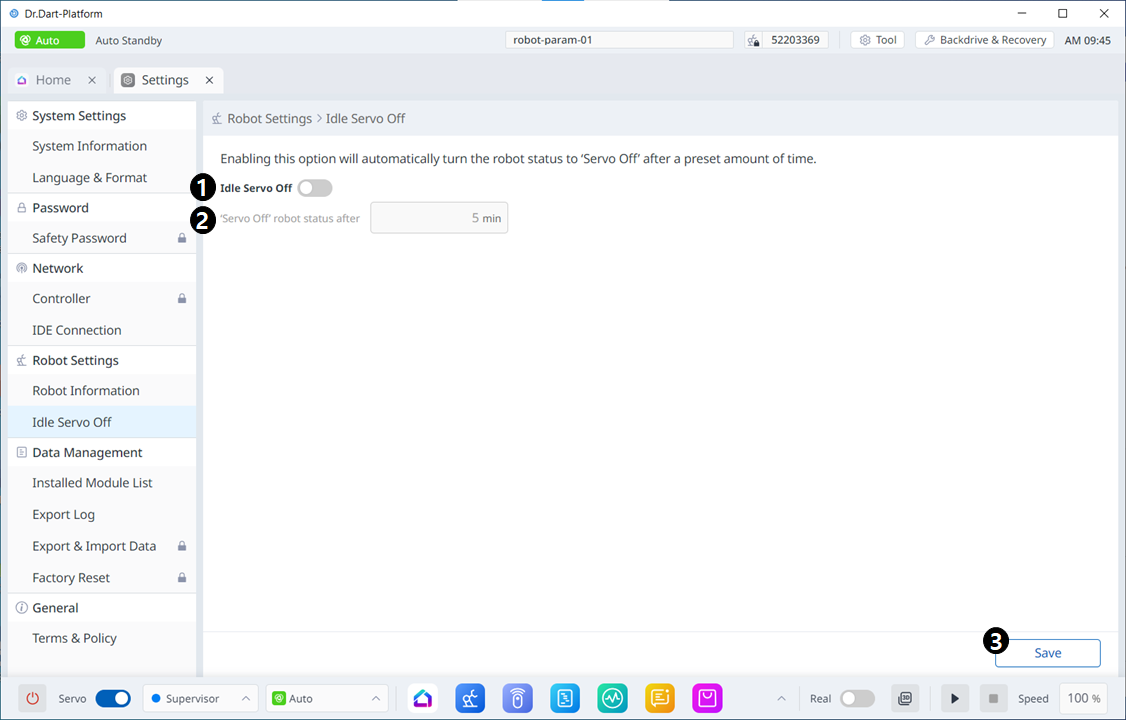
ロボットアイドルサーボオフ
ロボットが一定時間アイドル状態の場合、ロボットは自動的に安全オフ状態に設定される。デフォルト値は5分であるが、時間はユーザーが希望する時間に変更できる。
メニュー
|
項目s |
概要 |
|
|---|---|---|
|
1 |
アイドルサーボオフを有効にする |
このボタンを使用すると、アイドルサーボオフを有効にすることができる。 |
|
2 |
サーボオフの設定 |
このフィールドでは、アイドルサーボを分単位でオフに設定する。 |
|
3 |
保存 |
このボタンを使用すると、変更した設定を保存することができる。 |
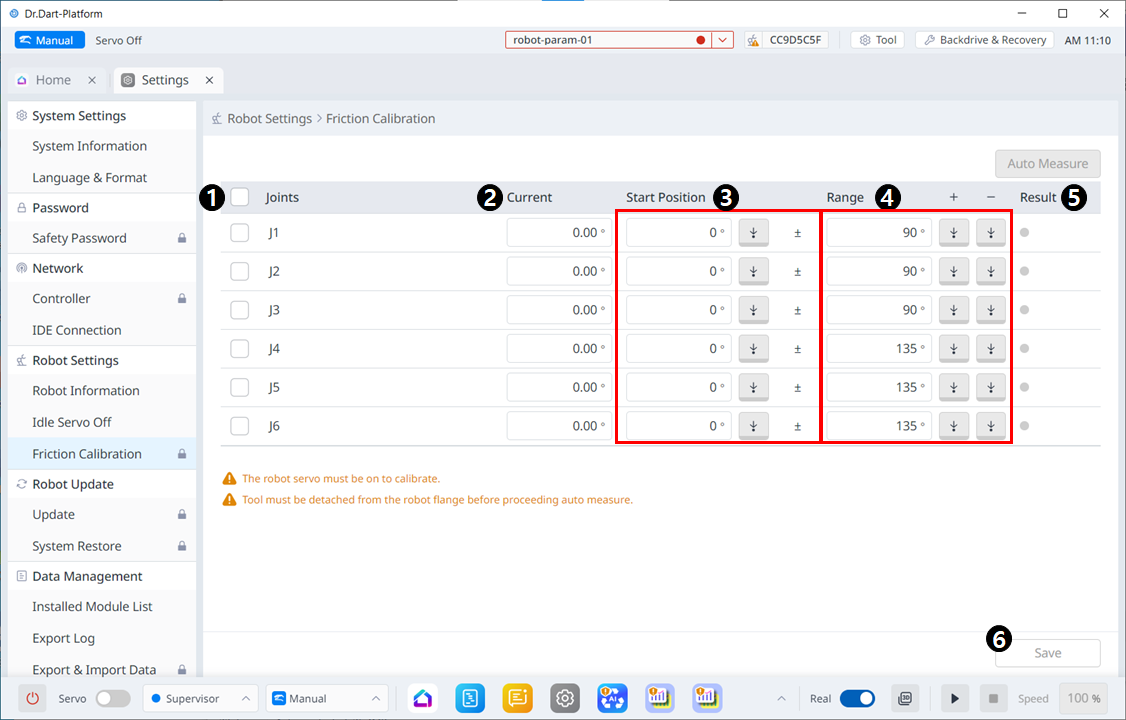
摩擦キャリブレーション
このメニューはEおよびAシリーズロボットのみでアクセス可能である。
メニュー
|
項目s |
概要 |
|
|---|---|---|
|
1 |
ジョイントチェックボックス |
自動測定するジョイント(Joint to Auto Measure)を選択する。 |
|
2 |
現行 |
現在のロボットの姿勢を表示する。 |
|
3 |
開始位置 |
自動測定(Auto Measure)の実行時にジョイントが開始する姿勢を入力する。選択されていない軸にも入力が必要。 |
|
4 |
範囲 |
軸が移動する範囲を入力する。チェックされた軸のみ入力可能。 |
|
5 |
結果 |
自動測定の結果を表示 |
|
6 |
保存 |
測定結果は部下にも適用される。 |