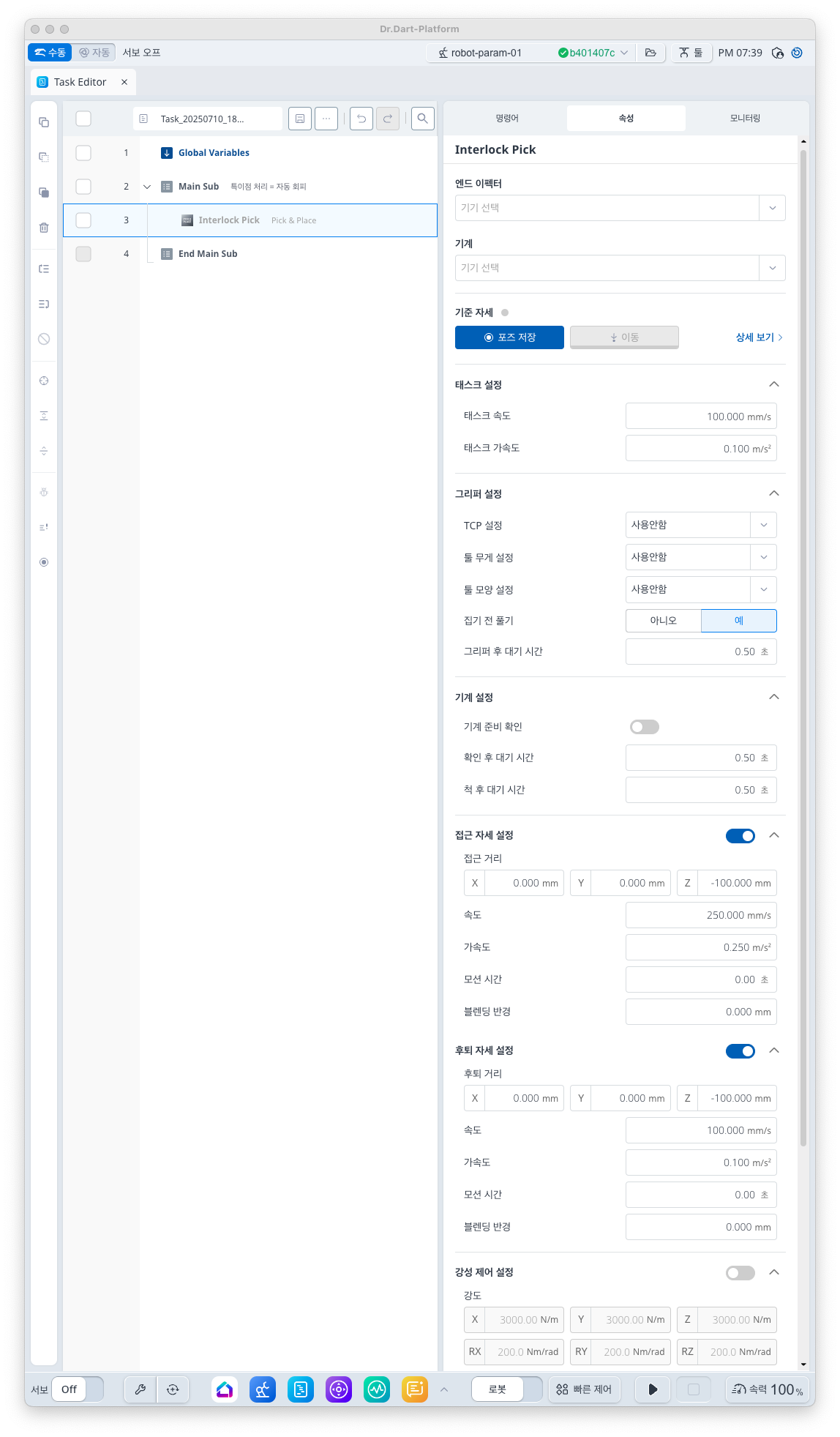
머신의 척에 교시된 위치로 이동하거나, 척에 물려있는 대상물에 접근하며 닿았을 때 그리퍼를 작동하여 대상물을 파지하는 명령어입니다.
기본 정보
|
항목 |
설명 |
|---|---|
|
추천 디바이스 |
|
|
옵션 기능 |
|
|
명령어 완성 조건 |
|
|
지원 로봇 시리즈 |
E, A, AS, M, H |
기본 동작 순서
[접근 자세] 로 이동 → [기준 자세] 로 이동 → [엔드 이펙트] 의 [Grasp] 동작 → [기계] 의 Chuck Open 동작 ([INTLK_Off]) → [후퇴 자세] 로 이동
화면 정의
|
항목 |
설명 |
기본값 및 입력 범위 |
|
|---|---|---|---|
|
기본 설정 |
엔드 이펙터 |
그리퍼 선택 시 입출력 테스트 가능 |
|
|
기계 |
머신 선택 시 입출력 테스트 가능 |
|
|
|
기준 자세 |
교시점
|
|
|
|
태스크 설정 |
태스크 속도 |
진입점에서 교시점까지 이동하는 속도 |
100 mm/s [0.001 ~ 8,000] |
|
태스크 가속도 |
진입점에서 교시점까지 이동하는 가속도 |
0.1 m/s2 [0.001 ~ 20] |
|
|
그리퍼 설정 |
TCP 설정 (옵션) |
사용할 [TCP] 선택 |
사용안함 [로봇 파라미터에 설정된 TCP 목록] |
|
툴 무게 설정 (옵션) |
작업물을 잡는 경우 해당 무게 정보 반영 |
사용안함 [로봇 파라미터에 설정된 툴 무게 목록] |
|
|
툴 모양 설정 (옵션) |
사용할 [툴 모양] 선택 |
사용안함 [로봇 파라미터에 설정된 툴 모양 목록] |
|
|
집기 전 풀기 (옵션) |
[Grasp] 동작 전 그리퍼 [Release] 동작 수행 여부 선택
|
True [True, False] |
|
|
그리퍼 후 대기 시간 |
[Grasp] 또는 [Release] 동작 후 대기 시간 |
0.5 s [0 ~ 10000] |
|
|
기계 설정 |
기계 준비 확인 (옵션) |
Machine ready 신호 대기 여부 선택 |
False [True, False] |
|
확인 후 대기 시간 |
Machine ready 신호 완료 후 대기 시간 |
0.5 s [0 ~ 10000] |
|
|
척 후 대기 시간 |
척 Open 동작 후 대기 시간 |
0.5 s [0 ~ 10000] |
|
|
접근 자세 설정 (옵션) |
사용 여부 |
접근 자세 사용 여부 선택 |
True [True, False] |
|
접근 거리 |
교시점으로부터 x, y, z 방향으로 떨어진 거리 |
[0, 0, -100] mm [-99999.999 ~ 99999.999] |
|
|
속도 |
진입점으로 가는 모션의 속도 |
250 mm/s [0.001 ~ 8000] |
|
|
가속도 |
진입점으로 가는 모션의 가속도 |
0.25 m/s2 [0.001 ~ 20] |
|
|
모션 시간 |
진입점으로 가는 모션의 시간
|
0 s [0 ~ 10000] |
|
|
블렌딩 반경 |
교시점과 후퇴간의 이동을 이어주는 블렌딩 반지름
|
0 mm [0 ~ 1000] |
|
|
후퇴 자세 설정 (옵션) |
사용 여부 |
후퇴 자세 사용 여부 선택 |
True [True, False] |
|
후퇴 거리 |
교시점으로부터 x, y, z 방향으로 떨어진 거리 |
[0, 0, -100] mm [-99999.999 ~ 99999.999] |
|
|
속도 |
후퇴점으로 가는 모션의 속도 |
100 mm/s [0.001 ~ 8000] |
|
|
가속도 |
후퇴점으로 가는 모션의 가속도 |
0.1 m/s2 [0.001 ~ 20] |
|
|
모션 시간 |
후퇴점으로 가는 모션의 시간
|
0 s [0 ~ 10000] |
|
|
블렌딩 반경 |
교시점과 후퇴간의 이동을 이어주는 블렌딩 반지름 |
0 mm [0 ~ 1000] |
|
|
강성 제어 설정 (옵션) |
사용 여부 |
강성 제어 사용 여부 선택 |
False [True, False] |
|
강성 |
강성 값 설정 |
x=y=z
rx=ry=rz
|
|
|
접촉 감지 설정 (옵션) |
사용 여부 |
접촉 감지 사용 여부 선택 |
False [True, False] |
|
태스크 방향 |
힘 제어 시 작업 방향 설정
|
Z [X, Y, Z] |
|
|
접촉 마진 |
접촉 감지 구간 설정을 위한 마진
|
2 mm [0 ~ 100] |
|
|
원하는 힘 |
목표 힘 값
|
12 N [-1200 ~ 1200] |
|
|
접촉 힘 |
접촉 감지를 위한 기준 힘 값 |
10 N [0 ~ 1200] |
|
|
시간 초과 |
접촉 감지 시간 |
10 s [0 ~ 10000] |
|
|
오프셋 마진 |
접촉 감지 이후 미세 후퇴 거리 |
0.5 mm [0 ~ 100] |
|