サーボオンとは、 ジョイントに電力を供給してロボットアームを駆動できるスタンバイ状態を指す。緊急停止ボタンが押されたとき、または安全制限に違反したときのサーボオフ。サーボオフ状態では、ジョイントの電源がオフになり、ロボットアームを駆動できず、 メインメニューでロボットアームドライブに関連付けられたタスクエディター、ジョグプラスが無効になる。
サーボオフからサーボオンに切り替えるには、下部のメインメニューの左側にあるサーボボタンをタップする。
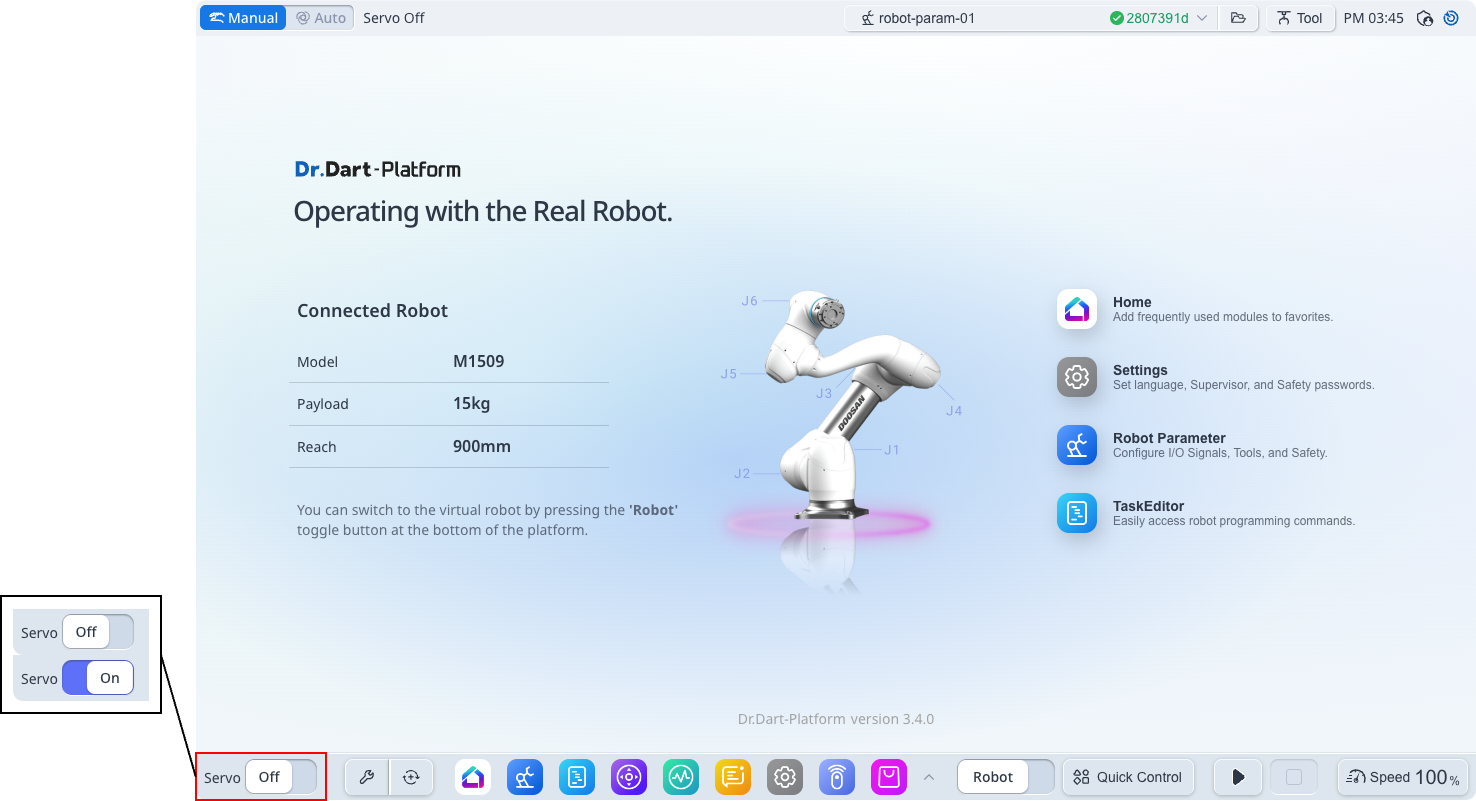
サーボオンとは、 ジョイントに電力を供給してロボットアームを駆動できるスタンバイ状態を指す。緊急停止ボタンが押されたとき、または安全制限に違反したときのサーボオフ。サーボオフ状態では、ジョイントの電源がオフになり、ロボットアームを駆動できず、 メインメニューでロボットアームドライブに関連付けられたタスクエディター、ジョグプラスが無効になる。
サーボオフからサーボオンに切り替えるには、下部のメインメニューの左側にあるサーボボタンをタップする。