I/Oエイリアス
Unknown Attachment
メニュー
|
項目s |
概要 |
|
|---|---|---|
|
1 |
コントローラデジタルI/O |
コントローラのデジタルI/O名は個別に設定可能。 |
|
2 |
フランジデジタルI/O |
フランジデジタルI/Oの名前は個別に設定可能。 |
|
3 |
コントローラアナログI/O |
コントローラアナログI/Oの名前は個別に設定可能。 |
|
4 |
フランジアナログ入力 |
フランジアナログI/Oの名前は個別に設定可能。 |
|
5 |
I/O名 |
名前は最大40文字である。 |
マウント
ロボット設置ポーズは、ロボット設置ポーズ(マウント)メニューで設定できる。ロボットが平らな面に設置されている場合、このステップはスキップできる。
ロボット設置ポーズは、[ ロボットパラメーター(Robot Parameters)]>[ロボット設定(Robot Settings)]>[マウント(Mount)]で設定できる。.
-
取り付け角度は自動測定機能を使用して測定できる。ただし、角度が5度未満の場合、自動測定は使用できない。
-
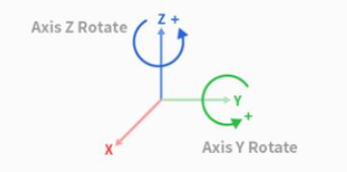
ロボットを天井や壁面に設置する場合は、ロボットの設置角度をY軸とZ軸の回転で設定できる。
-
自動工具重量計算は重力に基づいて行われるため、取り付け設定が完了したら工具重量をリセットすることを推奨する。
注意
ロボット設置ポーズ(マウント)を設定する場合は、ワールド座標も変更することを推奨する。ワールド座標を変更しない場合、ティーチペンダントのロボットシミュレータ画面上にロボットのポーズが平面上に設置されているロボットとして表示される(基本)。
Unknown Attachment
メニュー
|
項目s |
概要 |
|
|---|---|---|
|
1 |
ロック切り替えボタン |
設定値をロックするために使用する。設定値を変更するには、安全パスワードが必要である。 |
|
2 |
マウントを使用 |
マウントの使用を有効にするボタン。ボタンはロック解除後に使用できる。 |
|
3 |
自動測定 |
これにより、命令された操作が自動化される。その横にある3Dシミュレーションは、この移動を示している。 |
|
4 |
情報画像 |
これは、マウントについて教えてくれる画像である。 |
|
5 |
情報メッセージ |
自動測定についてのメッセージ。 |
|
6 |
増分/減少ボタン |
これにより、必要に応じて増減することができる。 |
|
7 |
Y軸回転入力フィールド |
Y軸の回転角度を直接入力できる。 |
|
8 |
Z軸回転入力フィールド |
Z軸の回転角度を直接入力できる。 |
|
9 |
[適用]ボタン |
これにより、設定された値を適用することができる。 |