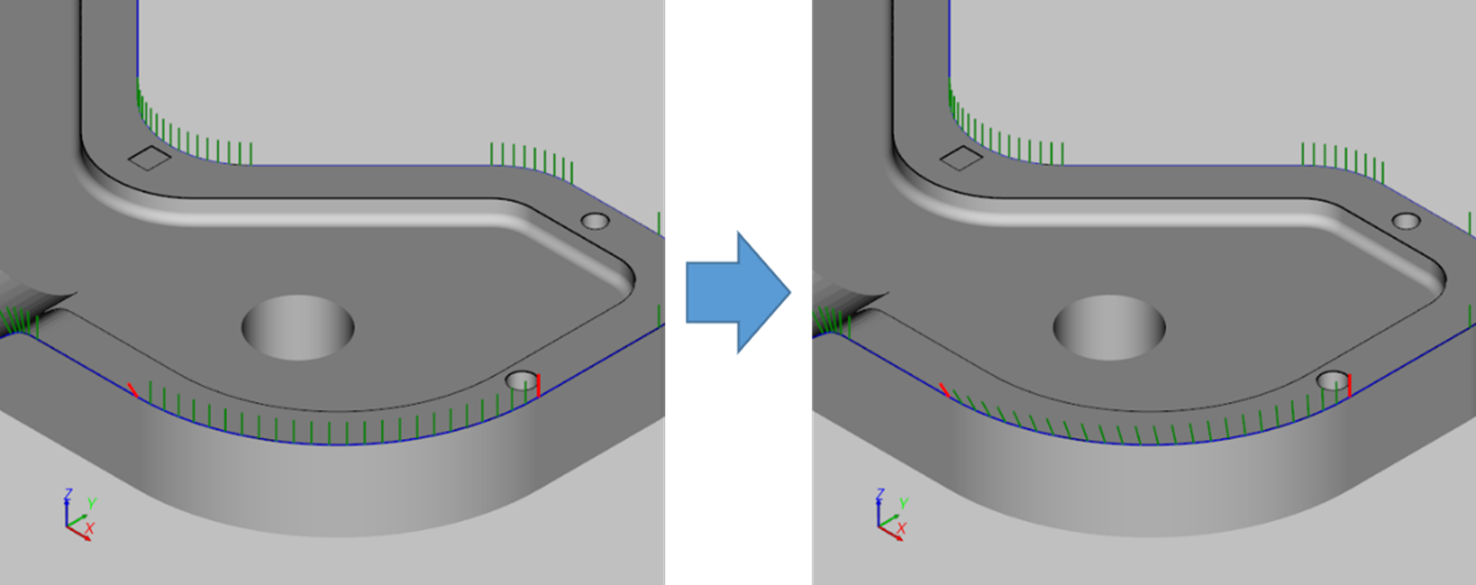
생성된 경로의 경유점의 방향 벡터를 변경하는 기능을 제공합니다. 경유점의 방향 벡터는 로봇의 자세를 결정합니다.
경유점 방향 조정
-
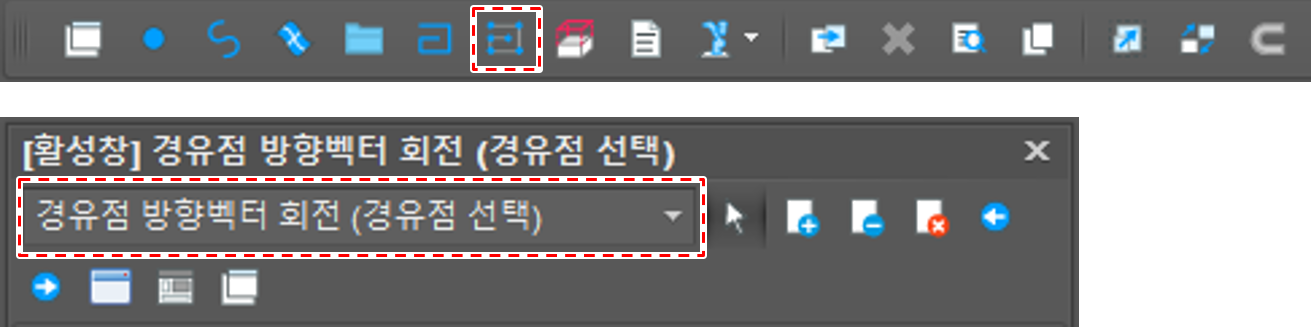
경유점 방향 벡터 회전 작업창을 여십시오.
메뉴에서 경로 편집 버튼을 클릭한 후, 활성창에서 경유점 방향 벡터 회전 옵션을 선택하십시오.
-
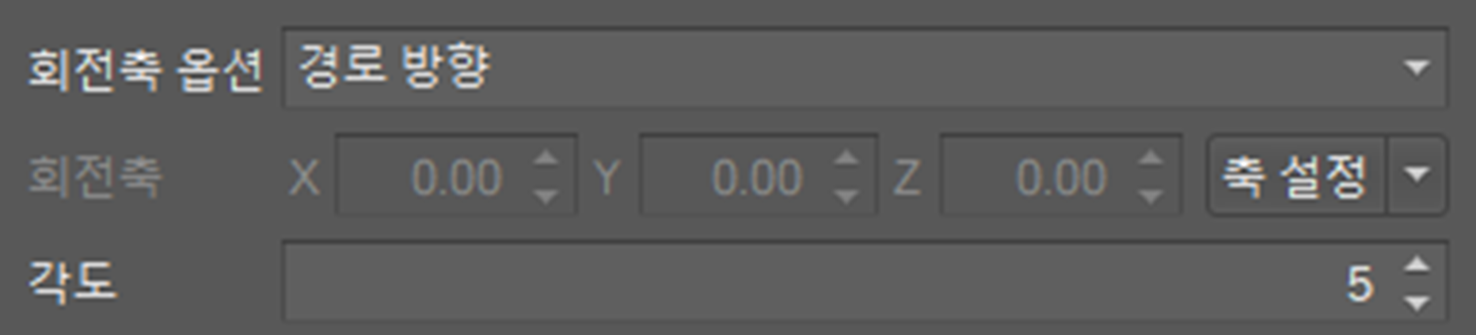
회전 옵션을 설정하십시오.
-
회전축 옵션 : 다음과 같은 옵션을 제공합니다
경로 방향
곡선 상 경유점의 탄젠트 방향을 의미합니다.
경로 수직 방향
곡선 상 경유점의 탄젠트와 법선의 수직 방향을 의미합니다.
직접 설정
사용자가 직접 방향을 설정합니다.
-
회전축: 회전축 옵션을 직접 설정으로 선택했을 때, 사용자가 회전축을 직접 설정할 수 있습니다.
-
회전 각도: 도(Degree) 단위의 회전 각도를 설정합니다.
-
-
회전할 경유점을 선택합니다. 1개 이상 선택할 수 있습니다.
-
변환 버튼을 클릭합니다.

-
변환 결과를 확인합니다.
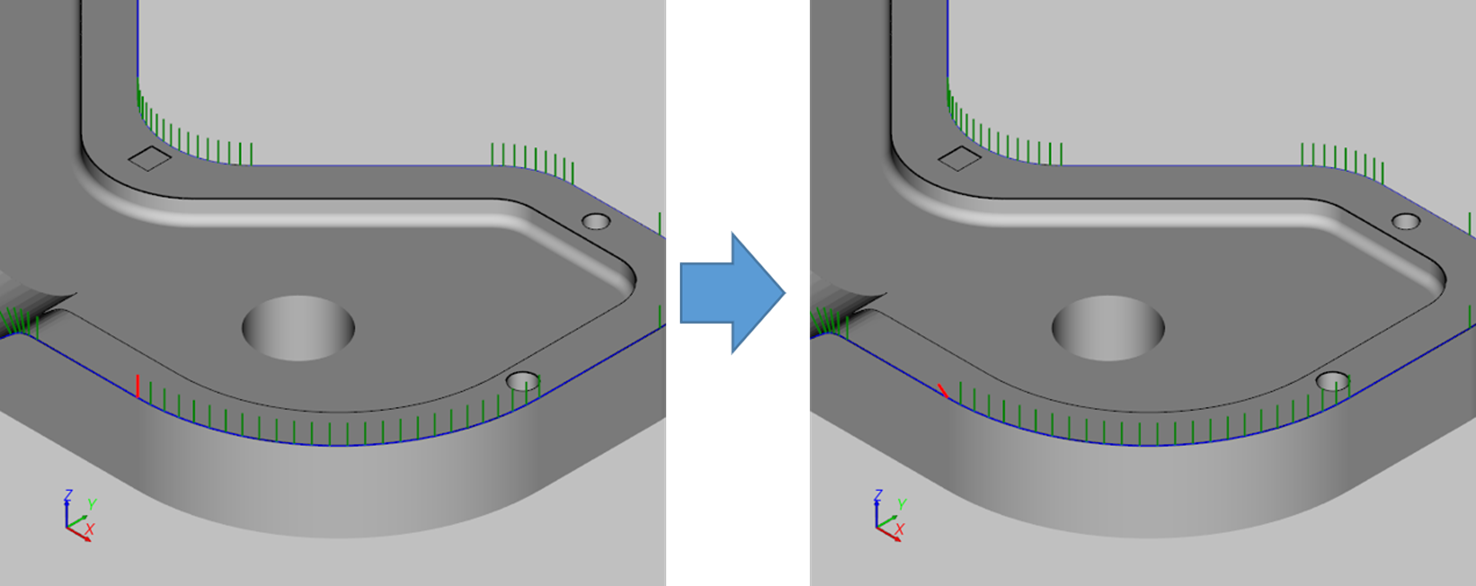
경유점 방향 보간
두 경유점 사이의 방향을 균등한 비율로 보간할 수 있습니다.
-
보간할 구간의 양 끝에 있는 두 경유점의 방향을 조정하십시오.
-
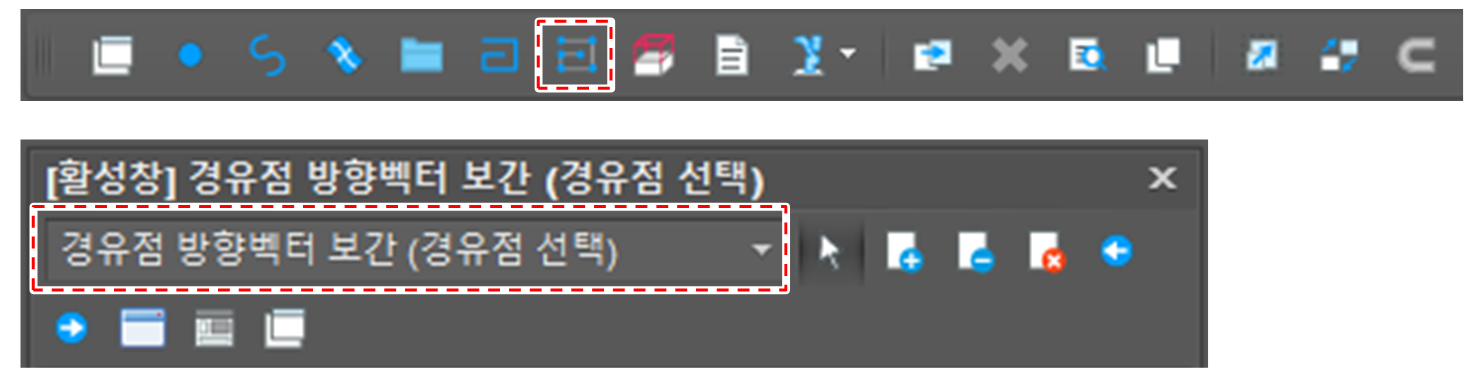
경유점 방향 보간 기능을 여십시오.
메뉴에서 경로 편집 버튼을 클릭한 후, 활성창에서 경유점 방향 벡터 보간옵션을 선택하십시오.
-
두 경유점을 선택하십시오.

-
보간 기능을 실행하십시오.

-
결과를 확인하십시오.