5가지 타입의 안전 영역이 있습니다.
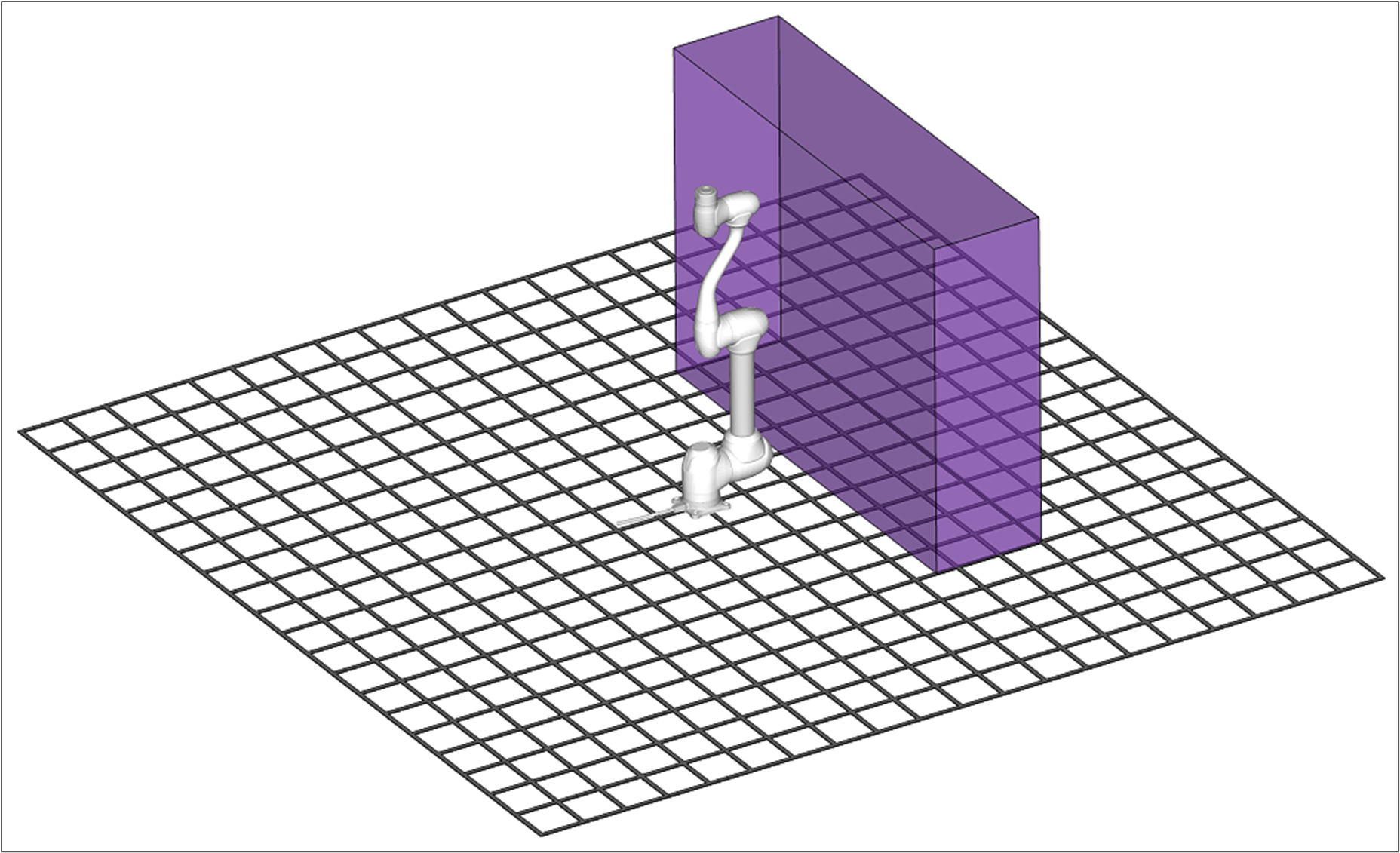
동작 공간
동작 공간은 로봇 동작이 제한되는 영역입니다.
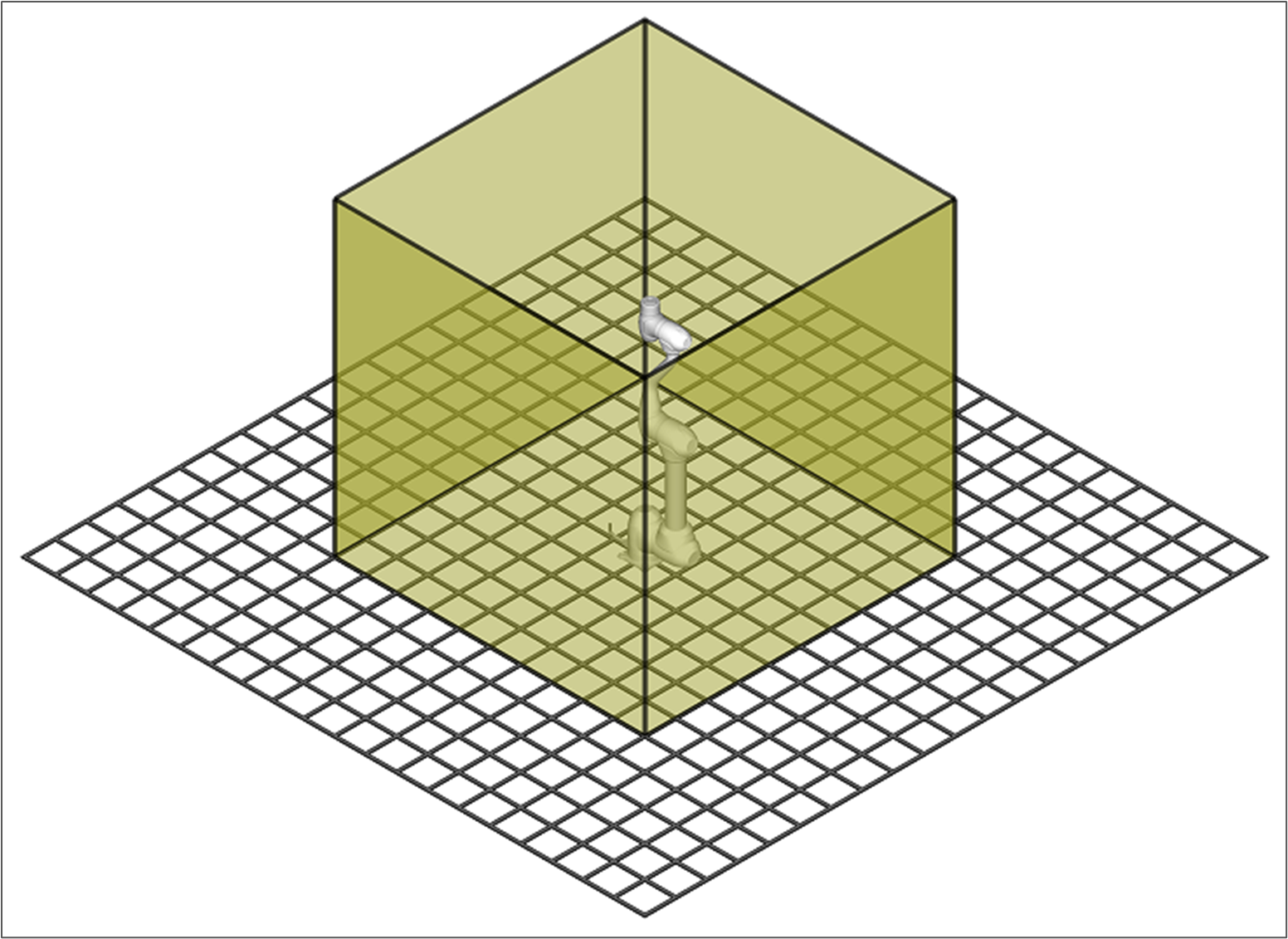
툴을 포함함 로봇 본체가 영역을 벗어나면 TCP_SLP 위반 오류가 발생합니다. 영역은 기하학적으로 사각 기둥, 원기둥, 다면 기둥 중 하나로 정의됩니다.
협동 작업 공간
협동 작업 공간은 사용자가 로봇과 협업하는 안전 영역입니다. 이 보완 물을 Standalone Workspace 라고 부르면 이는 로봇이 자율적으로 작동하는 공간을 의미합니다.
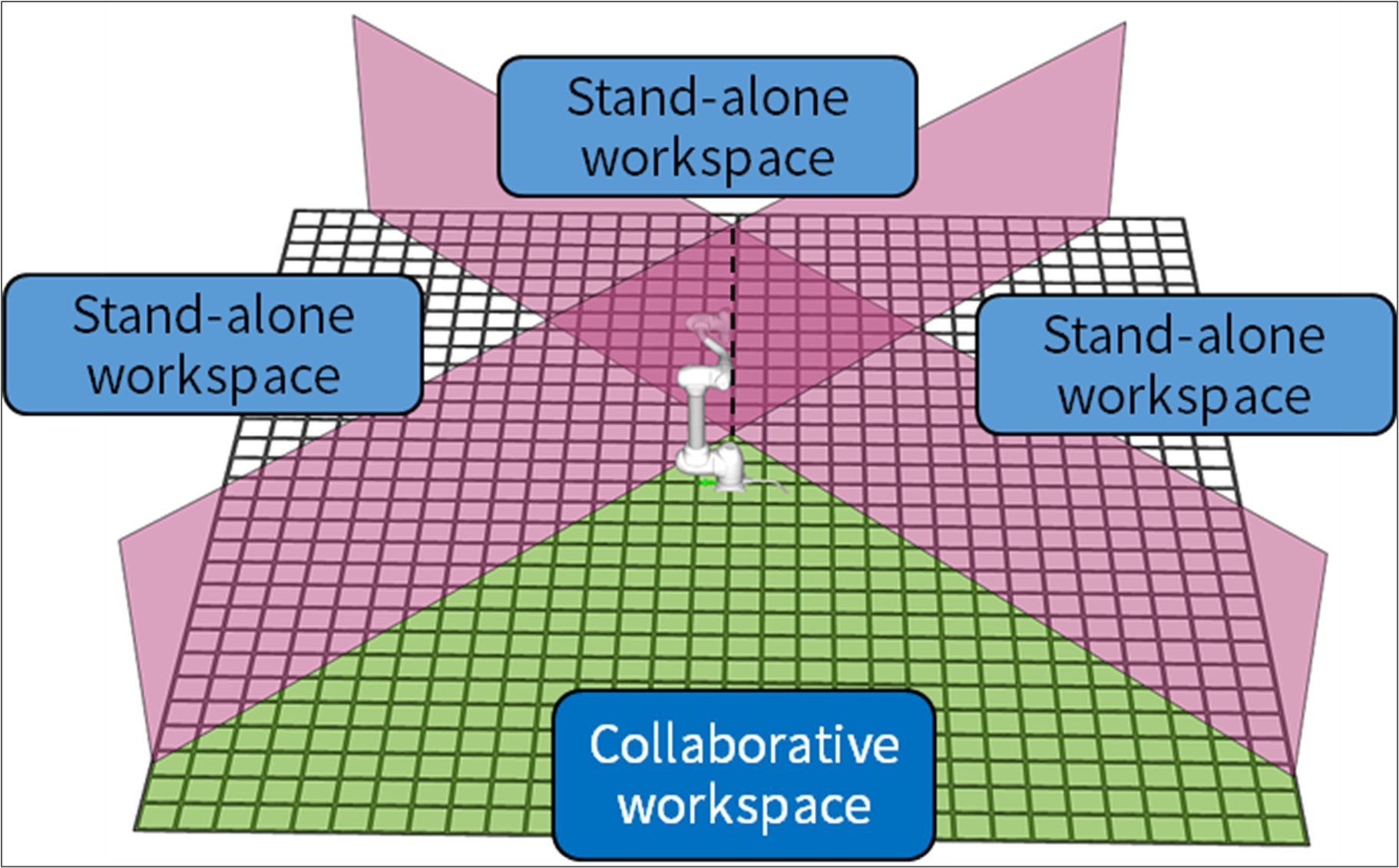
로봇이 자율 모드로 움직이고 있고 TCP 가 협동 작업 공간에 있는 경우 작동 속도 모드가 감속 모드로 변경됩니다.
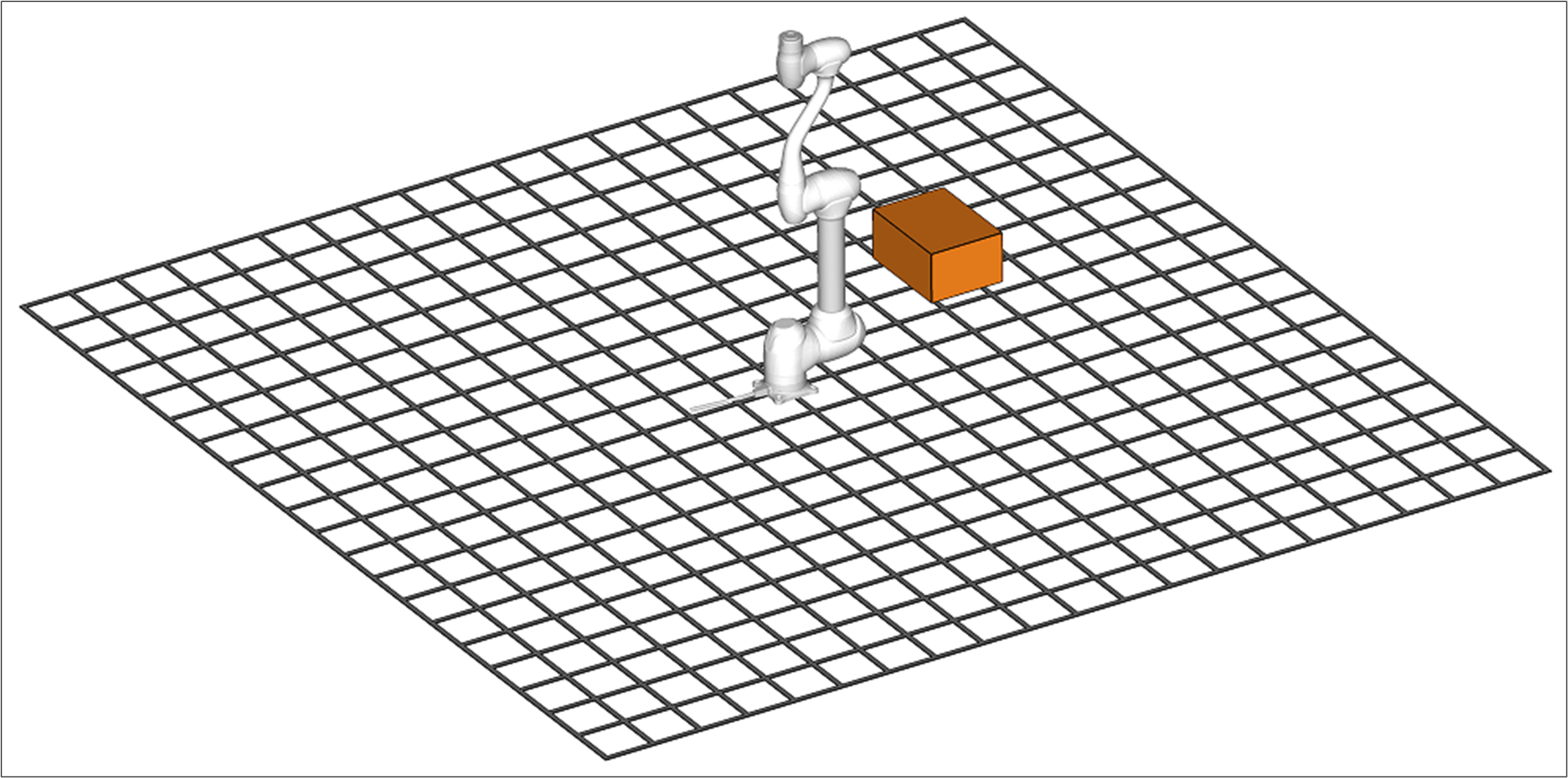
침범 금지 영역
침범 금지 영역은 로봇 근처의 주의 물체를 보호하기 위한 안전 영역입니다.
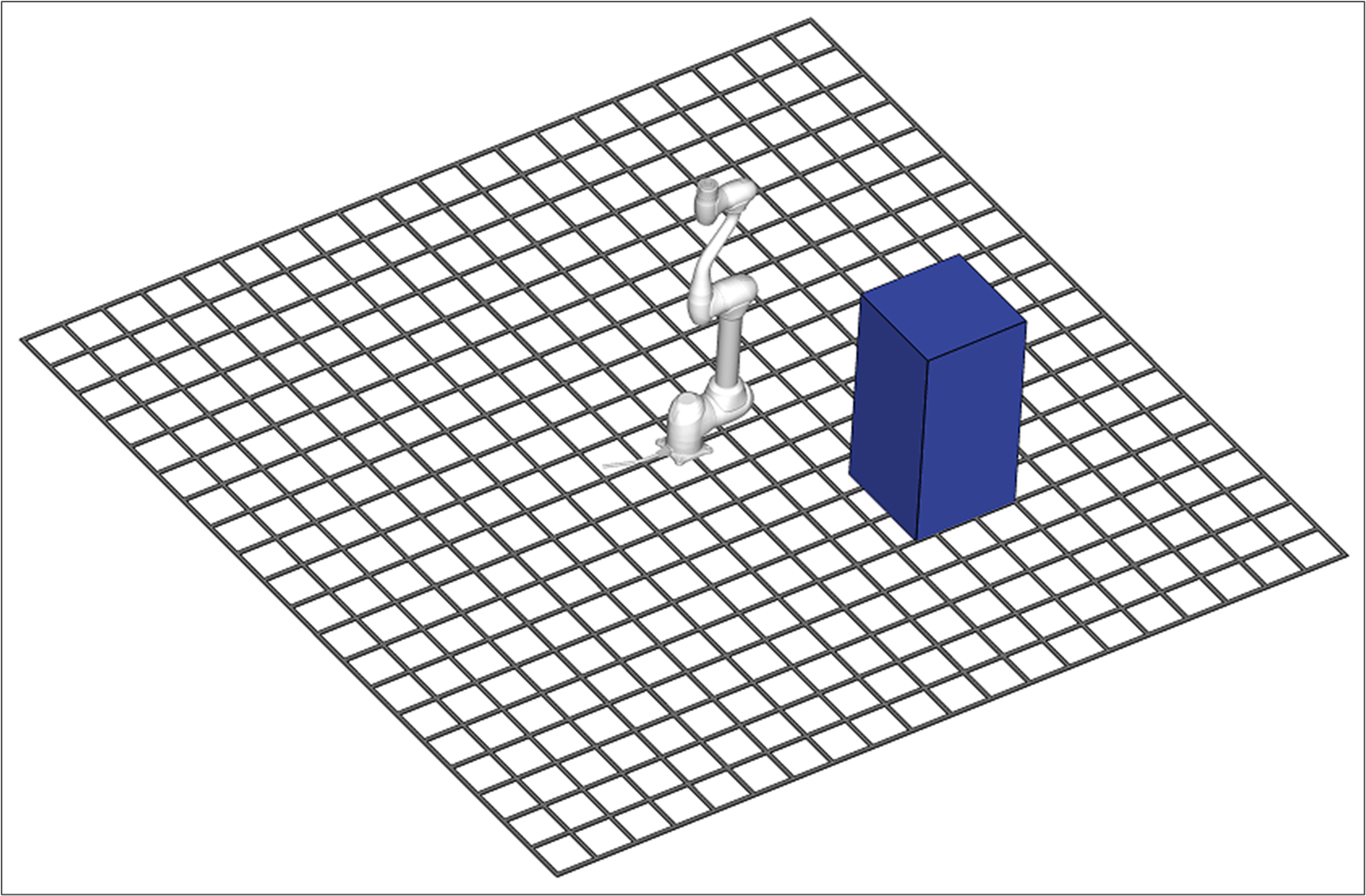
툴이 포함된 로봇 몸체가 영역이 정의한 모양과 충돌하면 TCP_SLP 위반 오류가 발생합니다. 영역은 기하학적으로 사각 기둥, 구, 다각 기둥 중 하나로 정의됩니다.
충돌 감시 임시 무효 영역
충돌 감시 임시 무효 영역은 TCP 가 영역 내부에 있을 때 충돌 감시가 일시적으로 비활성화되거나 로컬 충돌 감도가 적용되는 안전 영역입니다.
영역은 기하학적으로 사각 기둥, 구, 다각 기둥, 원기둥, 기울어진 박스 중 하나로 정의됩니다.
다음과 같이 3개의 존 설정이 있습니다.
-
충돌 검사 On/Off: 속성이 OFF 인 경우, TCP 가 영역 내에 있으면 충돌 감시가 비활성화됩니다. 만약 속성이 ON이면 충돌 감시에 로컬 충돌 민감도 속성이 적용됩니다.
-
충돌 민감도: 충돌 감시에 적용된 로컬 충돌 감도
-
존 동적 활성화: 이 속성을 설정하면 해당 안전 입력 채널이 활성화된 경우에만 충돌 무효화 영역이 활성화됩니다.
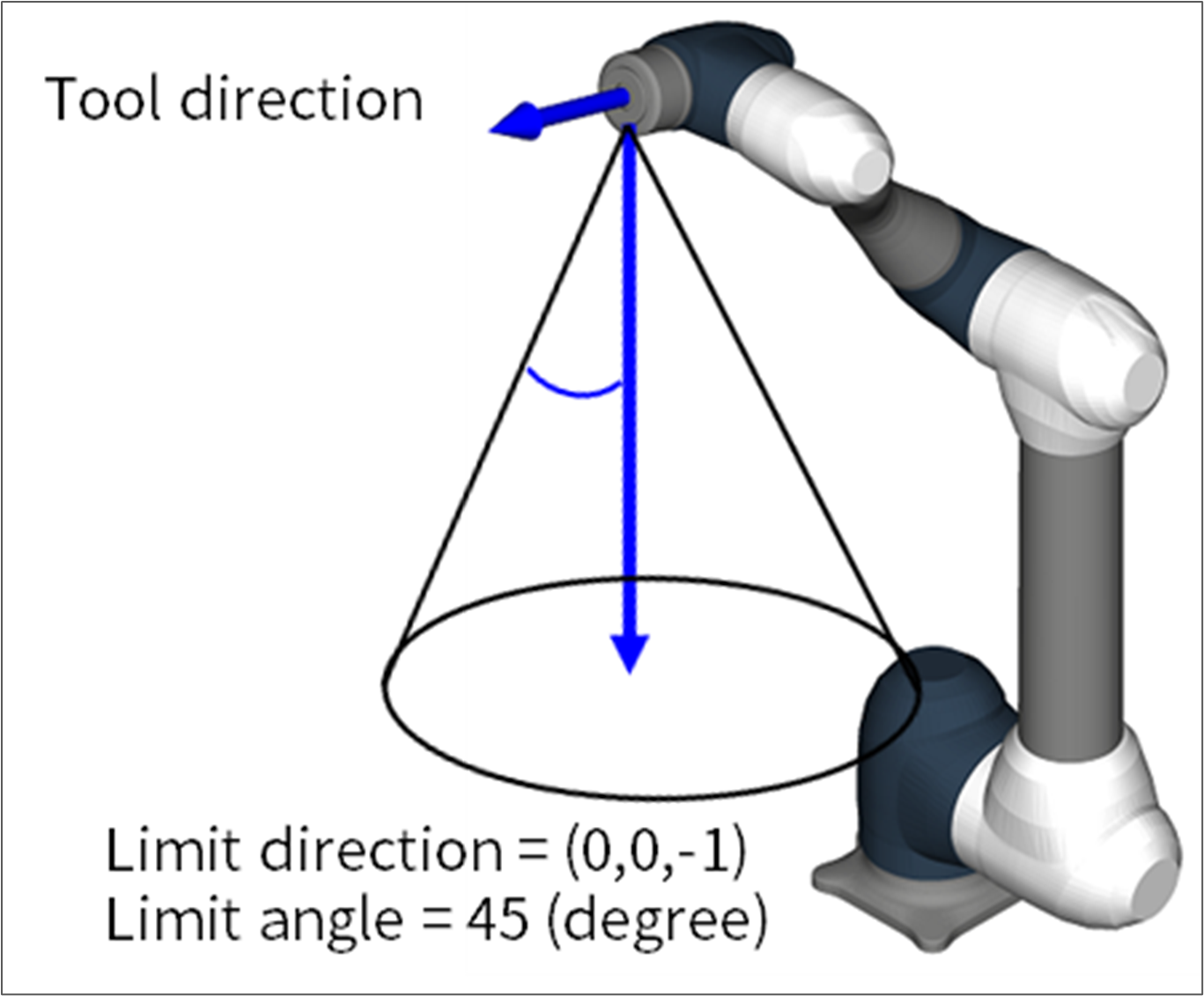
툴 방향 제한 영역
툴 방향 제한 영역은 TCP 가 영역 내에 있을 때 툴 방향이 제한되는 안전 영역입니다. 만약 툴 방향이 한계 조건을 위반하면, TCP_SLO 위반 오류가 발생합니다.
영역은 기하학적으로 사각기둥, 구, 다각기둥, 원기둥, 기울어진 박스 중 하나로 정의됩니다.
존 속성은 다음과 같이 두 가지입니다.
-
툴 제한 방향: 전역 좌표 계 기반의 위반 제한 방향.
-
제한 각도: 제한 방향에 따른 위반 제한 각도.
제한 방향 및 각도는 원뿔 모양으로 구성됩니다. 툴 방향이 한계 범위를 초과하면 TCP_SLO 위반 오류가 발생합니다.