정의
tracking_conveyor(conv_id, time=0.3)
기능
로봇이 가속하여 Conveyor Tracking을 시작합니다.
인수
|
인수명 |
자료형 |
기본값 |
설명 |
|---|---|---|---|
|
conv_id |
int |
- |
Conveyor ID |
|
time |
float |
0.3 |
Tracking 시작를 위한 가속 시간(sec) |
알아두기
tracking_conveyor 명령이 떨어지면 로봇 현재 위치에서 Conveyor를 tracking하기 시작합니다. 택타임 단축을 위해서 가속 중에도 task motion 호출이 가능하지만, 가속 시간 동안은 오차가 발생할 수 있습니다.
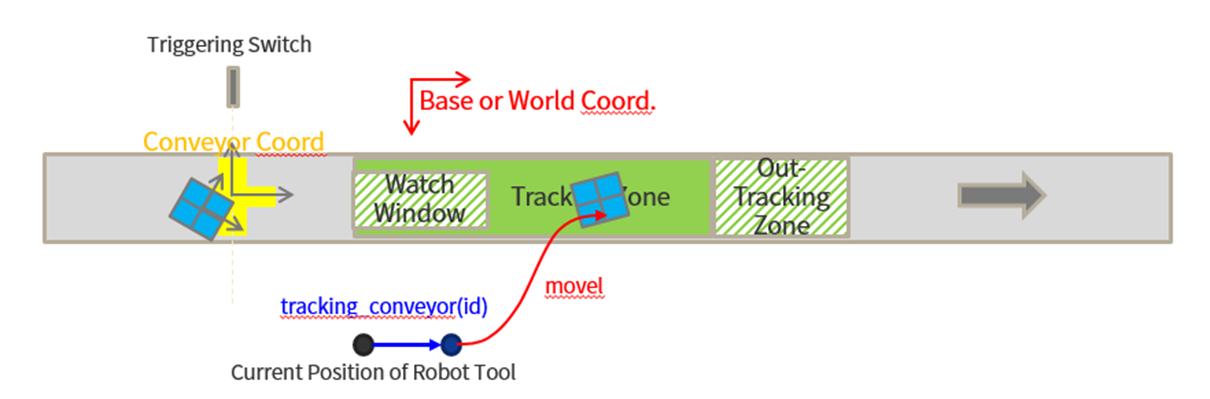
[tracking sequence]
리턴
|
값 |
설명 |
|---|---|
|
0 |
Conveyor Tracking 성공 |
|
음의 정수 |
가속 과정 중 로봇 작업영역을 벗어날 것으로 예상될 때 |
예외
|
예외 |
설명 |
|---|---|
|
DR_Error (DR_ERROR_TYPE) |
인수들의 데이터형 오류 시 |
|
DR_Error (DR_ERROR_VALUE) |
인수의 값이 유효하지 않을 시 |
|
DR_Error (DR_ERROR_RUNTIME) |
C Extension 모듈 에러 발생 시 |
|
DR_Error (DR_ERROR_STOP) |
프로그램 강제 종료 시 |
예제
Python
CONV1 = set_conveyor(‘conveyor1’)
while True:
CONV_COORD_1 = get_conveyor_obj(CONV1)
tracking_conveyor(CONV1) # start moving to track conveyor
# task on conveyor
movel(posx(0,0, 50, 0, 0, 0), ref=CONV_COORD_1)
movel(posx(0,0, 0, 0, 0, 0), ref=CONV_COORD_1)
set_digital_output(DO_GRIPPER, 1)
movel(posx(0,0, 50, 0, 0, 0), ref=CONV_COORD_1)
untracking_conveyor(CONV1)
obj_count = obj_count + 1
관련 명령어
Keyword
tracking / conveyor