ロボットのエンドフランジカバーにはM8仕様の8ピンコネクタが2つあり、位置と形状は下図を参照のこと。
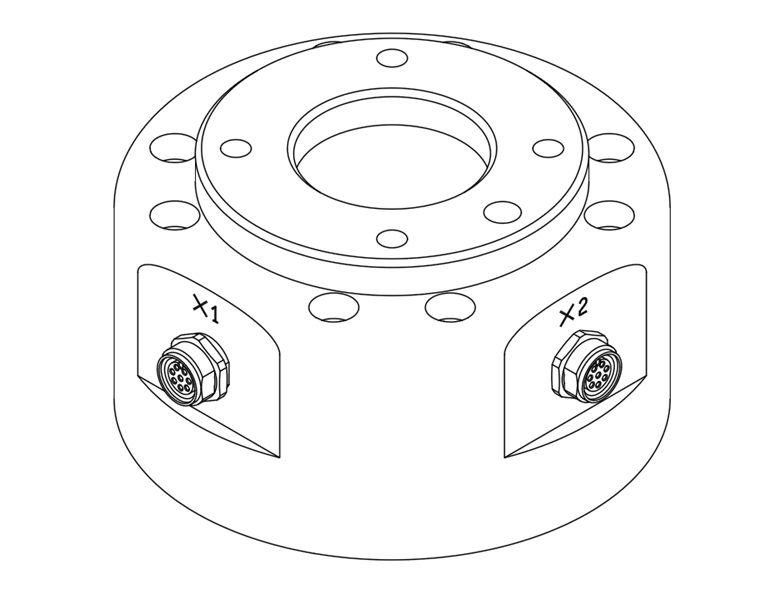
コネクタは、グリッパまたは特定のロボットツールに組み込まれたセンサを操作するために必要な電力および制御信号を供給する。産業用ケーブルの例を次に示す(同等のケーブルを使用可能)。
-
Phoenix連絡先1404178、オス(ストレート)
-
Phoenix連絡先1404182、オス(直角)
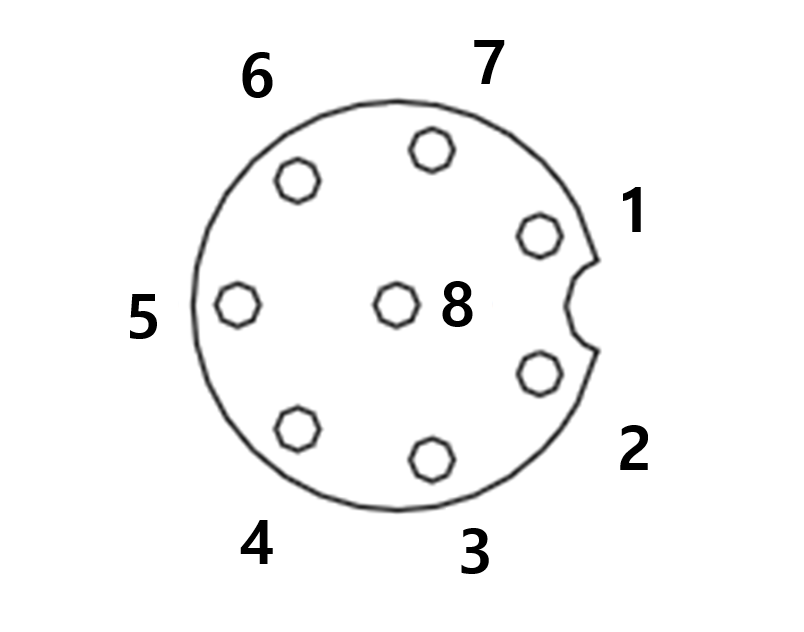
概略図
各コネクタのピンマップは次のとおりである。
X1コネクタとX2コネクタで提供されるI/O機能は互いに異なり、詳細なI/O設定については下表を参照のこと。
X1設定
|
いいえ |
信号の種類 |
概要 |
|---|---|---|
|
1 |
デジタル入力1 |
PNP(ソースタイプ、デフォルト) |
|
2 |
デジタル出力1 |
PNP(ソースタイプ、デフォルト)またはNPN(シンクタイプ)のいずれかに設定 |
|
3 |
デジタル出力2 |
PNP(ソースタイプ、デフォルト)またはNPN(シンクタイプ)のいずれかに設定 |
|
4 |
アナログ入力1/RS-485+ |
電圧(0-10V)または電流(4-20mA、デフォルト)/ |
|
5 |
電源 |
内部電源を+24V(デフォルト)、+12Vまたは0Vに設定する |
|
6 |
アナログ入力2/RS-485- |
電圧(0-10V)または電流(4-20mA、デフォルト)/ |
|
7 |
デジタル入力2 |
PNP(ソースタイプ、デフォルト) |
|
8 |
GND |
|
X2の設定
|
いいえ |
信号の種類 |
概要 |
|---|---|---|
|
1 |
デジタル入力3 |
PNP(ソースタイプ、デフォルト) |
|
2 |
デジタル出力3 |
PNP(ソースタイプ、デフォルト)またはNPN(シンクタイプ)のいずれかに設定 |
|
3 |
デジタル出力4 |
PNP(ソースタイプ、デフォルト)またはNPN(シンクタイプ)のいずれかに設定 |
|
4 |
アナログ入力3/RS-485+ |
電圧(0-10V)または電流(4-20mA、デフォルト)/最大1Mボーレートに設定 |
|
5 |
電源 |
内部電源を+24V(デフォルト)、+12Vまたは0Vに設定する |
|
6 |
アナログ入力4/RS-485- |
電圧(0-10V)または電流(4-20mA、デフォルト)/最大1Mボーレートに設定 |
|
7 |
デジタル入力4 |
PNP(ソースタイプ、デフォルト) |
|
8 |
GND |
|
フランジ入出力(I/O)の初期電力は24Vに設定され、0Vまたは12Vに設定できる。
I/O接続時の詳細な電源仕様については、以下の表を参照のこと。
|
パラメータ |
最小 |
種類 |
マックス |
ユニット |
|---|---|---|---|---|
|
供給電圧(12Vモード) |
11.4 |
12 |
12.6 |
V |
|
供給電圧(24Vモード) |
22.8 |
24 |
25.2 |
V |
|
供給電流 |
- |
- |
3 |
A |
警告
-
電源遮断時にptが何らかの危険を生じさせないように、工具とグリッパーを設定する。
(工具から部材が落下するなど) -
各コネクタの5番端子は、ロボットに電力が供給されている間は常時24Vを出力するため、工具やグリッパーの設定時にはロボットへの電源供給を必ず遮断すること。
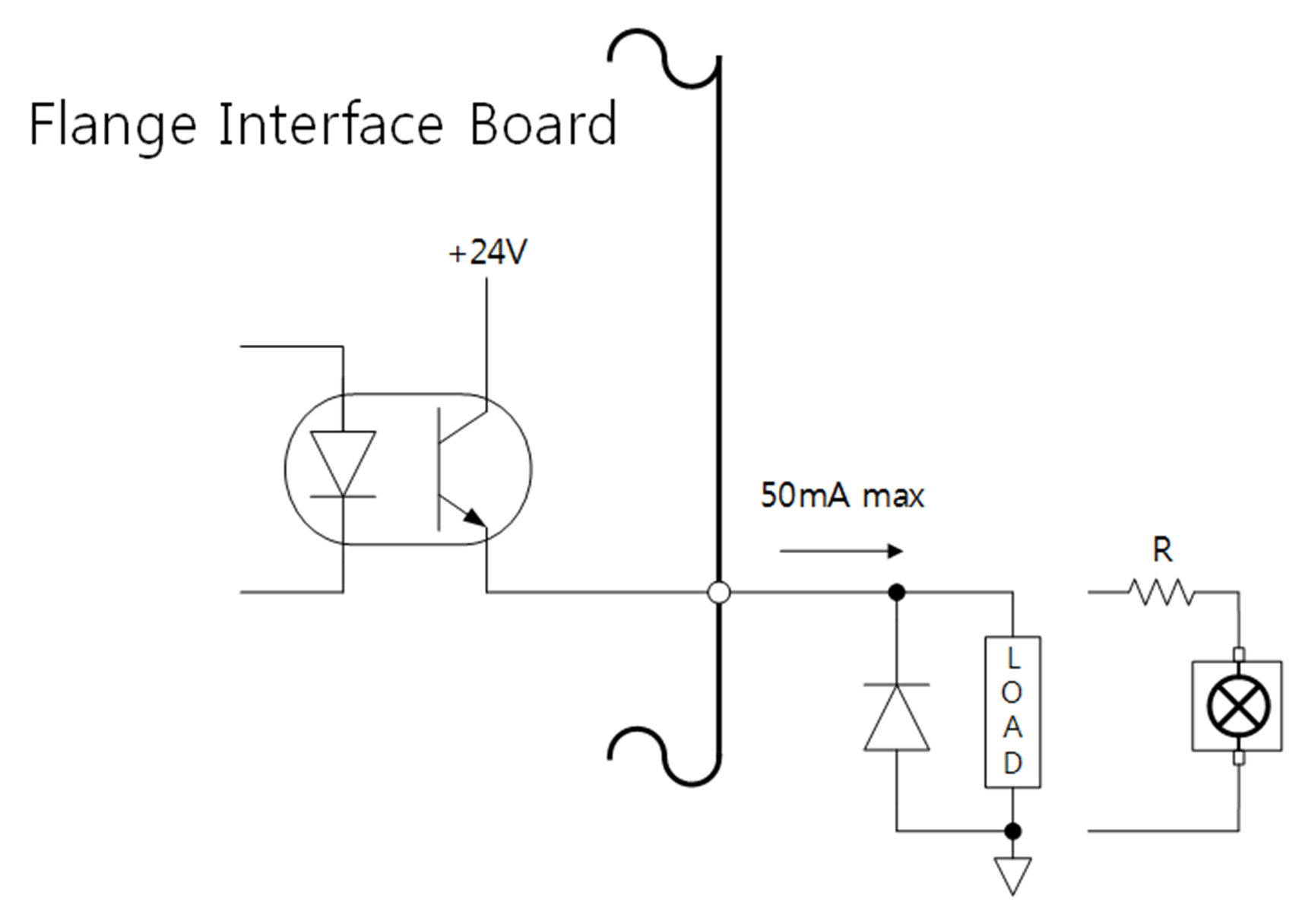
フランジデジタル出力仕様
フランジデジタル出力はPNP仕様で、出力にフォトカプラ出力が設定されている。
デジタル出力を有効にすると、対応する出力チャネルは+24Vになる。ディジタル出力がディセーブルの場合、対応する出力チャネルの状態はオープン(フローティング)である。
デジタル出力の電気仕様は以下の通りである。
|
パラメータ |
最小 |
種類 |
マックス |
ユニット |
|---|---|---|---|---|
|
10mA駆動時の電圧 |
23 |
- |
- |
V |
|
50mA駆動時の電圧 |
22.8 |
- |
23.7 |
V |
|
走行時の電流 |
0 |
- |
50 |
ma |
2024年4月11日から設定を以下のように変更した。
デジタルOU出力は、
|
モード |
アクティブ |
非アクティブ |
|---|---|---|
|
PNP(ソースタイプ、デフォルト) |
高 |
開く |
|
NPN (シンクタイプ) |
低 |
開く |
フランジ入出力(I/O)の初期電力は24Vに設定され、0Vまたは12Vに設定できる。
デジタル出力が有効になると、対応する出力チャネルは++12Vまたは++24Vになる。
ディジタル出力がディセーブルの場合、対応する出力チャネルの状態はオープン(フローティング)である。
デジタル出力の電気仕様は以下の通りである。
|
パラメータ |
最小 |
種類 |
マックス |
ユニット |
|---|---|---|---|---|
|
12Vモード走行時の電圧 |
11.4 |
12 |
12.6 |
V |
|
24Vモードを走行中の電圧 |
22.8 |
24 |
25.2 |
V |
|
走行時の電流 |
0 |
- |
50 |
ma |
注意
-
デジタル出力に電流制限はない。操作中に上記の仕様を無視すると、製品に永久的な損傷を与える可能性がある。
-
下図はデジタル出力の設定例であるため、ツールとグリッパーを接続しながら参照すること。
-
回路を設定する際は、必ずロボットの電源を切断すること。
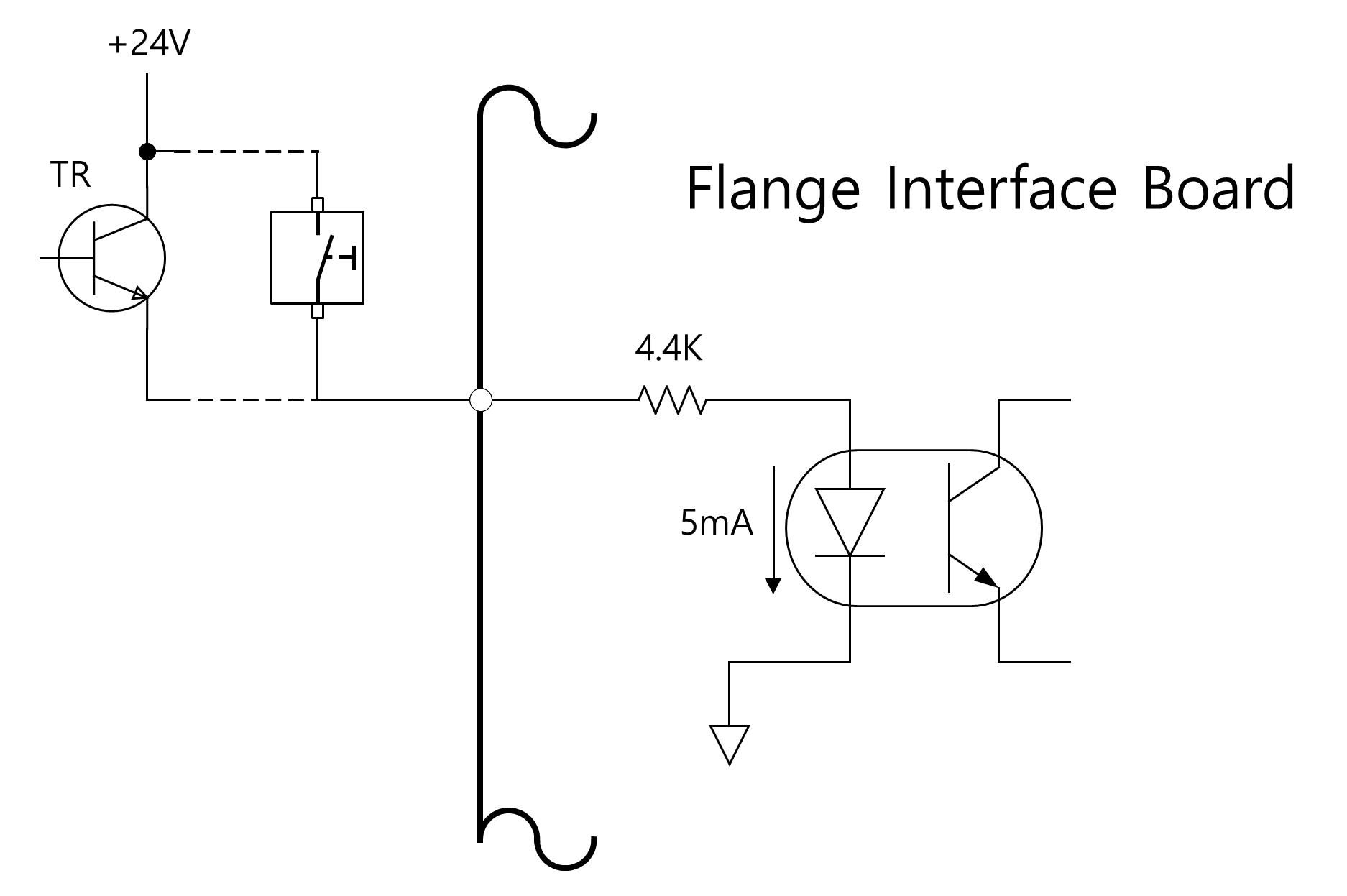
フランジデジタル入力仕様
フランジデジタル入力はフォトカプラ入力を備えている。
24V入力に基づく電流は、内部抵抗によって5mAに制限される。
デジタル入力の電気的仕様は以下の通りである。
|
パラメータ |
最小 |
種類 |
マックス |
ユニット |
|---|---|---|---|---|
|
入力電圧 |
0 |
- |
26 |
V |
|
論理的に高い |
4.4 |
- |
- |
V |
|
論理値が低い |
0 |
- |
0.7 |
V |
|
入力抵抗 |
- |
4.4k |
- |
Ω |
注意
-
下図はデジタル入力の設定例であるため、入力装置を接続する際に参照すること。
-
回路を設定する際は、必ずロボットの電源を切断すること。
フランジアナログ入力仕様
外部デバイスから電圧または電流信号を受信する。
アナログ入力は電圧(0-10V)または電流(4-20mA)に設定可能。
電気的仕様を以下に示す。
|
パラメータ |
最小 |
種類 |
マックス |
ユニット |
|---|---|---|---|---|
|
電圧モードでの入力電圧 |
0 |
- |
10 |
V |
|
電流モードでの入力電流 |
4 |
- |
20 |
ma |
|
解像度 |
- |
12 |
- |
ビット |