Skip to main content
Manual PDF download
ROS 2 Docs.
API Docs.
Legacy manual
3.6.0
3.5.0
3.4.0
3.3.0
3.2.2
3.2.1
3.2.0
1. M/H Series
2. A Series
3. E Series
4. P Series
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Main navigation
Close navigation
3.6.0
3.5.0
3.4.0
3.3.0
3.2.2
3.2.1
3.2.0
1. M/H Series
2. A Series
3. E Series
4. P Series
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Main
Manual PDF download
ROS 2 Docs.
API Docs.
Legacy manual
Main
パート1安全マニュアル
パート2ロボットの起動
パート3設置マニュアル
パート4インターフェイス
パート5ロボット管理
パート6DART -プラットフォームマニュアル
システムの電源をオン/オフする
プログラムの画面レイアウトの概要
ロボットを理解する
のサーボの概要
バックドライブモジュール
リカバリモジュール
ロボットパラメータモジュール
リモートコントロールモジュール
タスクエディタモジュール
ステータスモジュール
ログモジュール
ストアモジュール
設定モジュール
システム情報
Setting language
パスワードの設定と変更
[ネットワーク]セクションでの設定
ロボットを設定する
ロボットの更新と復元
データを管理する
通知位置の設定
モジュールの更新
Jog Plusモジュール
付録
Breadcrumbs
Home
ユーザーマニュアル(V3.5.0)
パート6DART -プラットフォームマニュアル
設定モジュール
On this Page
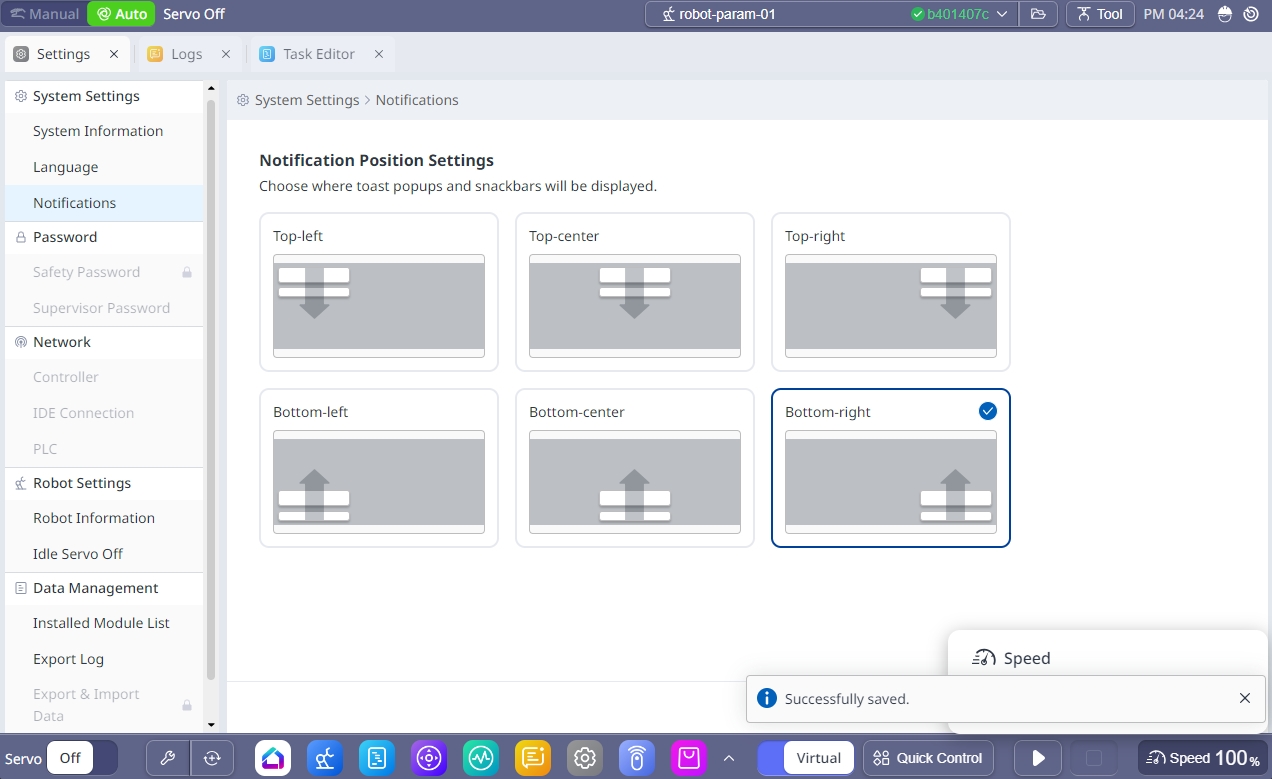
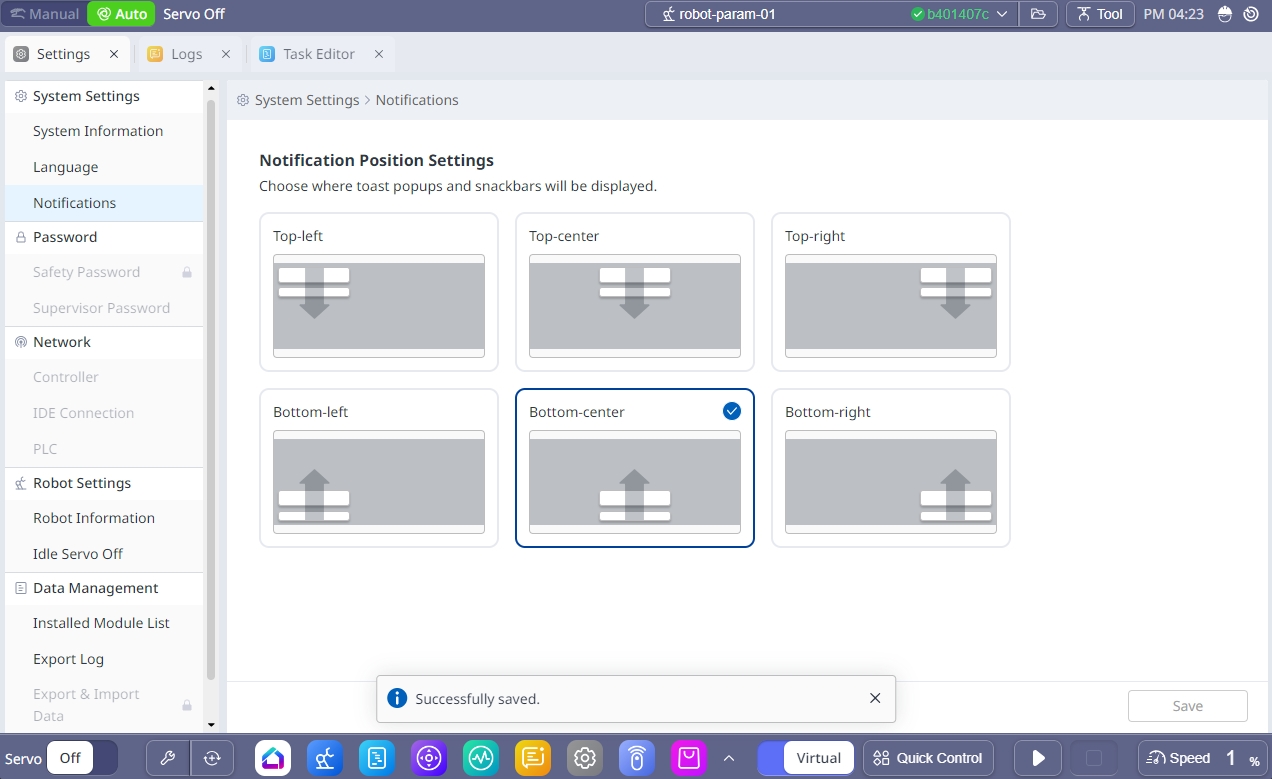
通知位置の設定
プラットフォームで発生する通知メッセージの場所を変更できる。
通知メッセージによって隠されている他の要素の問題を解決できる。