梱包材を取り外す
必須 簡単 3分
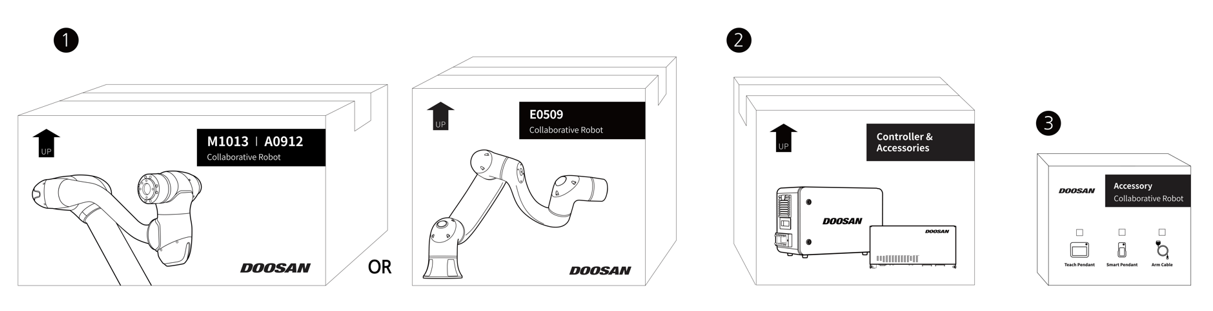
斗山ロボティクス社のロボットを購入すると、ロボットとコントローラを収めた2つの箱が配送される。梱包材を取り外し、内容物を確認する。構成要素の詳細については、『 構成要素リスト』を参照。.
-
マニピュレータは、大きい方のボックスに含まれている。
-
コントローラは小さい箱に入っている。
-
ティーチペンダントとロボットケーブルはアクセサリボックスに入っている
注意
-
配送中の安全性を確保するため、すべての製品は固い保護材を使用して包装されているため、箱から取り外す際には注意が必要である。
-
箱から製品を取り外す際は、落下による製品の損傷に注意すること。
ケーブルをコントローラに接続する
必須 簡単 1分
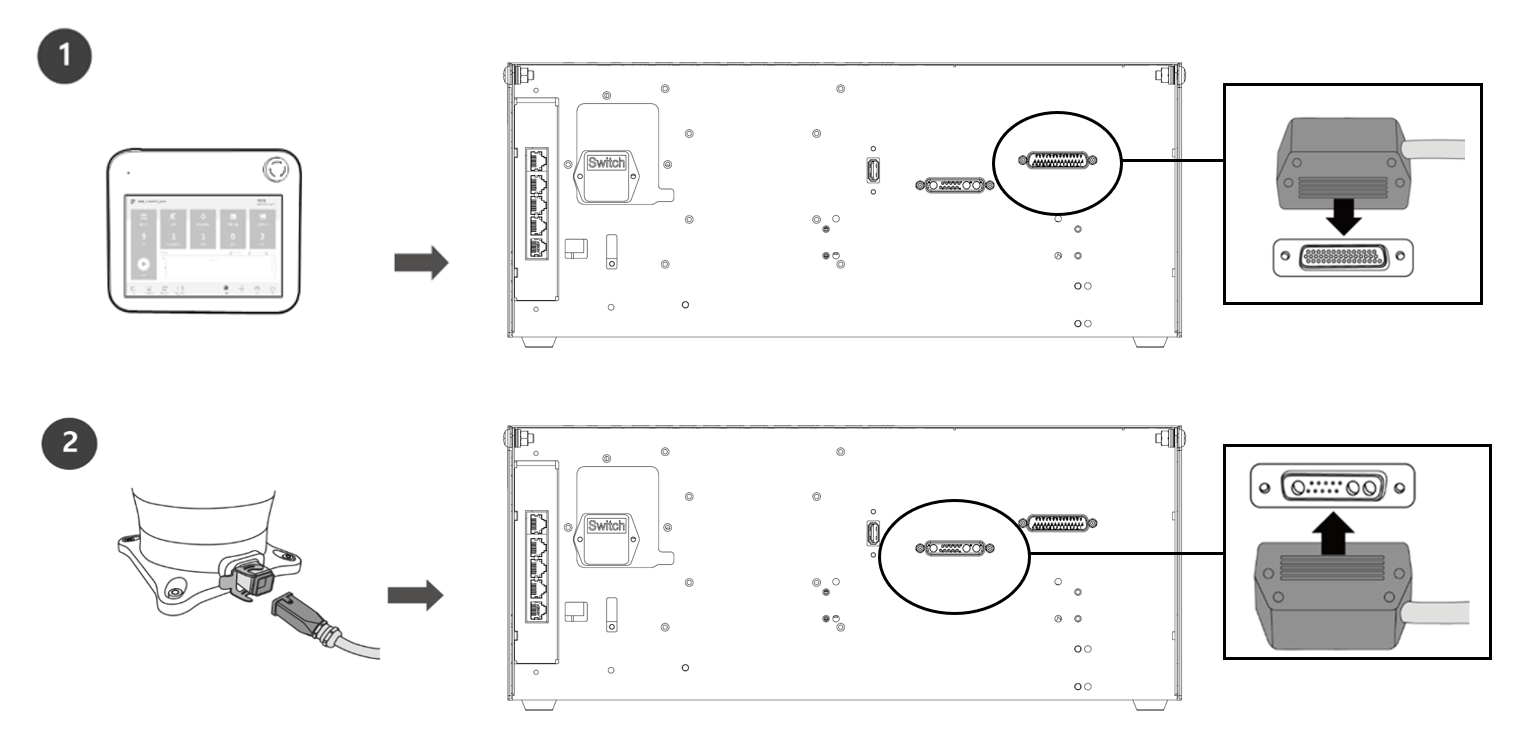
ティーチペンダントとロボットケーブルをコントローラに接続する。
-
ティーチペンダントケーブルを、カチッと音がするまでコントローラの対応する接続部に接続し、ケーブルがしっかりと差し込まれていることを確認する。
-
ロボットケーブルの反対側の端を、カチッと音がするまでコントローラの対応する接続に接続し、ケーブルがしっかりと差し込まれていることを確認する。
注意
-
ケーブルを接続するときは、ピンが曲がらないように接続する前に接続の形状を確認する。
-
電磁波によるノイズが問題となる場合は、正常に動作するためにフェライトコアを設置する必要がある。フェライトコアの設置場所の詳細については、以下を参照のこと。
ロボットベースを固定する
必須 簡単 3分
ロボットベースを固定し、工具フランジに工具を取り付ける場合は、次の追加コンポーネントが必要である。
-
M8六角レンチボルト4
-
φ 5プレイスマーカー2
マニピュレータベースの4つの9.0 mm穴にM8ボルトを使用して、ロボットを固定する。詳しくは、『 ロボットの固定』を参照。.
-
ボルトの締付けトルクは20 Nmを推奨する。振動による緩みを防ぐためにワッシャ(スプリングフラット)を使用する。
-
2本の φ 5プレイスマーカーピンを使用して、ロボットを正確に固定位置に設置する。
注釈
-
M/A/H/E/P接地タップ固定ガイド
-
ロボットベースにグラウンドタップを追加('23年12月23日関連の設計変更承認完了:ECO00371_ロボットベースグラウンドボルトファスニングパーツを追加)
-
接地ボルトは付属していないため、必要に応じてユーザー自身で準備して固定することが可能
-
アースボルトの仕様:M4X4L
-
ガイドテキストの例:斗山ロボティクスのすべてのロボットには外部の接地タップが装備されている。使用環境に応じて接地が必要な場合は、M4X4Lボルトで接地線を接続することができる。グランドタップはグランドラベルの近くにある。
-
グラウンドラベル
