斗山ロボティクスのロボットは9つの動作を提供する。ロボットの動作は、標準動作であるMoveJとMoveLと、これら2つの動作から派生した7つの動作によって制御される。
ロボットモーションのタイプ
|
|
モーション |
特徴 |
|---|---|---|
|
1 |
MoveJ |
ロボットの各ジョイントが現在の角度からターゲット角度に移動し、同時に停止する
|
|
2 |
MoveL |
ロボットTCPをまっすぐに維持しながら、ロボットがターゲット点に移動する
|
|
3 |
MoveSJ |
ロボットがロボットによって設定されたすべての角度を移動する
|
|
4 |
MoveSX |
ロボットTCPは、指定されたすべての点をスプライン曲線に従って移動する 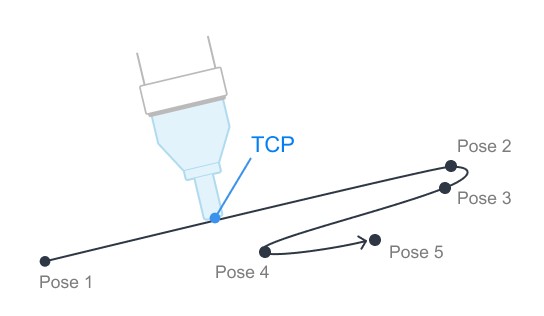
|
|
5 |
MoveJX |
ロボットTCPがターゲット点に移動するようにロボットポーズが指定される
|
|
6 |
MoveC |
ロボットTCPが円弧を維持しながらターゲット点に移動 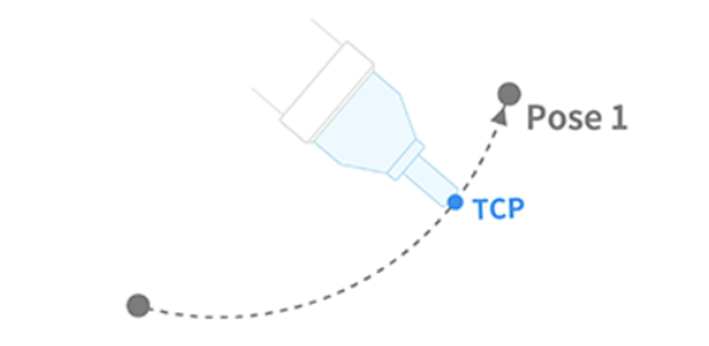
|
|
7 |
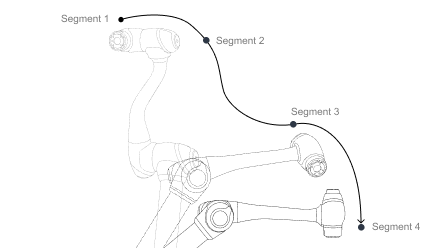
MoveB |
連続した直線と円弧で構成される断面を通って、ロボットが最終的な目標点に移動する 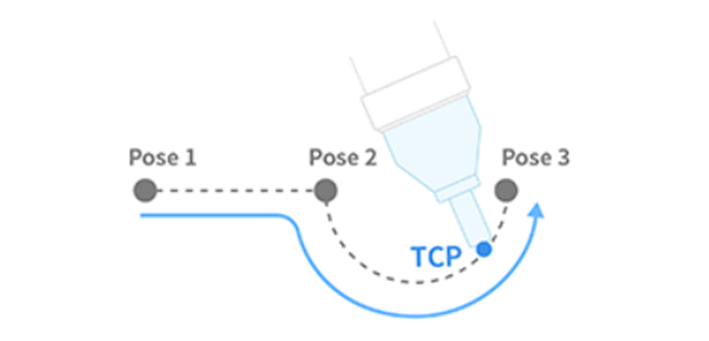
|
|
8 |
MoveSpiral |
ロボットがスパイラル中心から最大半径に移動 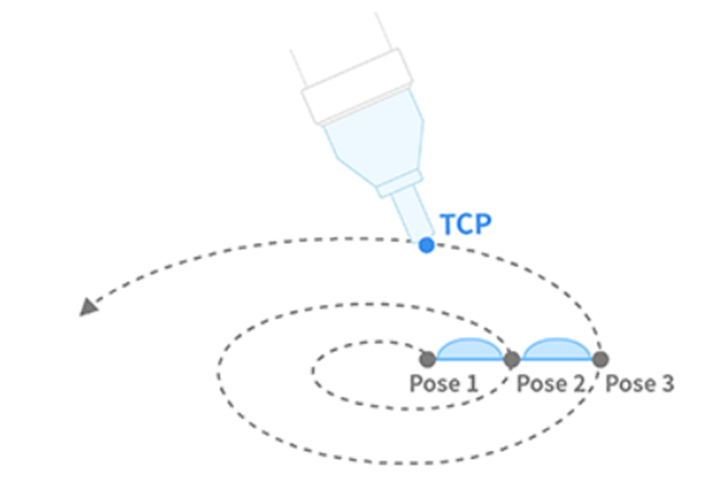
|
|
9 |
MovePeriodic |
ロボットが一定の振幅とサイクルでパスを移動する 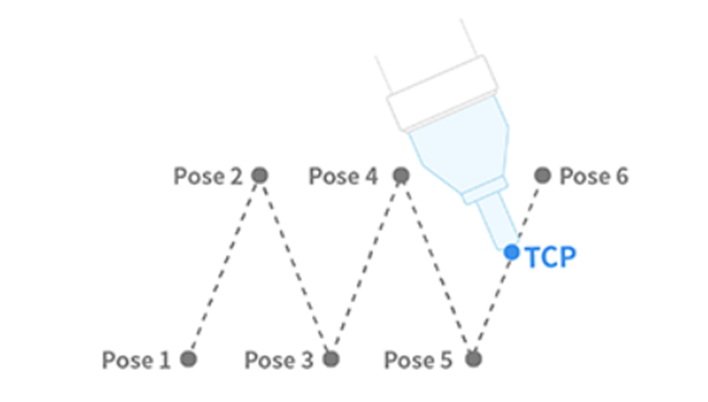
|
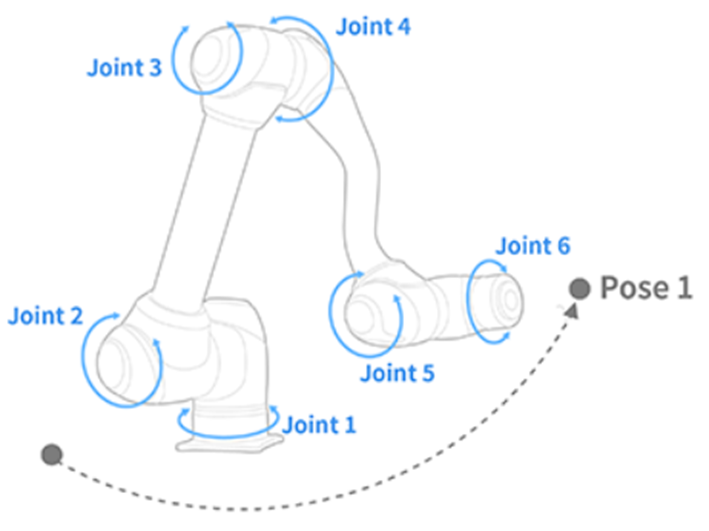
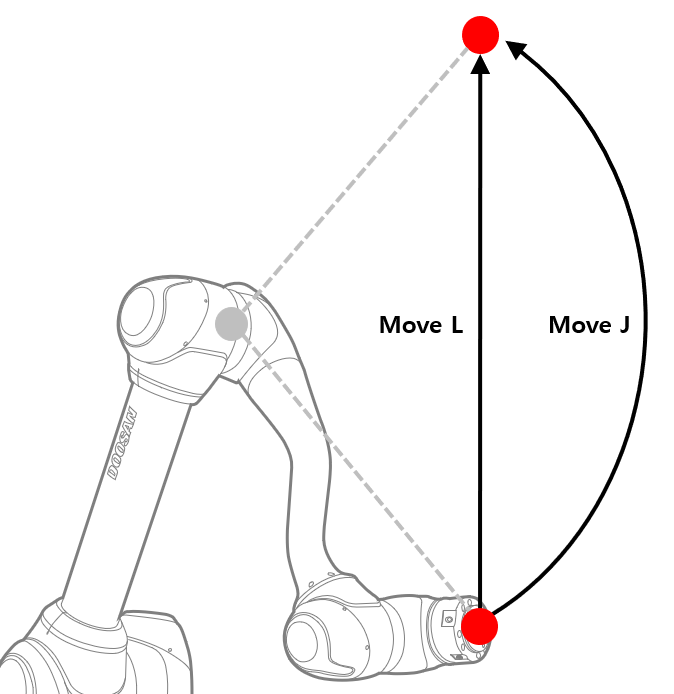
MoveJ&MoveL
ロボットモーションを使用する前に、MoveJとMoveLの標準動作を理解することが重要である。
-
J in MoveJは関節を意味する。この動作では、各関節が目標角度に移動し、同時に停止する。
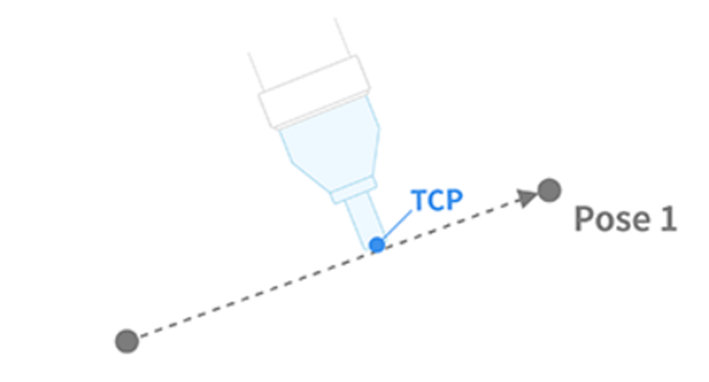
-
L in MoveLはLINEARを意味する。この動作では、ロボット端のTCPが線形動作でターゲットポーズ(位置と角度)に移動する。
|
|
種類 |
MoveJ |
MoveL |
|---|---|---|---|
|
1 |
移動方法 |
|
|
|
2 |
利点 |
|
|
|
3 |
デメリット |
|
|
|
4 |
活用 |
|
|