Unknown Attachment
メニュー
|
|
項目s |
概要 |
|---|---|---|
|
16 |
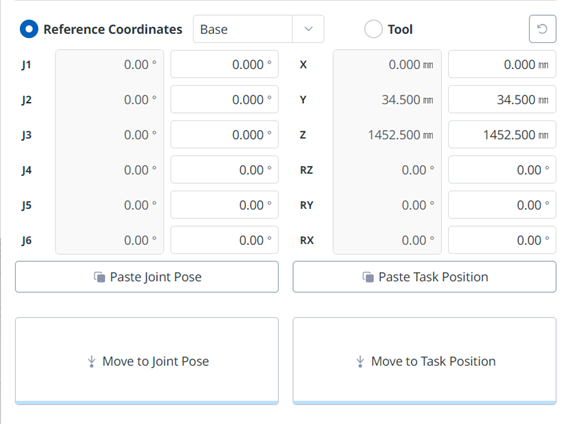
参照座標系を選択 |
図18のタスク座標に使用する参照座標系を選択する。ベース座標、ワールド座標、またはユーザー座標を選択できる。 |
|
17 |
関節姿勢 |
現在のロボット姿勢とターゲットジョイント姿勢を表示する。 |
|
18 |
タスクの姿勢 |
選択した基準座標系に適合する現在のロボットの姿勢とターゲットタスクの姿勢を表示する。 |
|
19 |
ジョイント姿勢を貼り付け |
クリップボードにコピーした姿勢値をジョイント姿勢パネルに貼り付ける。 |
|
20 |
タスクの姿勢を貼り付け |
クリップボードにコピーした姿勢値をタスク姿勢パネルに貼り付ける。 |
|
21 |
ジョイント移動ボタン |
このボタンを押すと、ロボットはターゲットジョイント姿勢に移動する。 |
|
22 |
タスクの移動ボタン |
このボタンを押すと、ロボットはターゲットタスク姿勢に移動する。 |
移動する角度を設定
ロボットを特定の角度で移動するには、次の手順を実行する。
-
[移動(Move)] タブを選択する。
-
ロボットジョイントのターゲット角度を入力する。(PシリーズモデルではJ4は無効)
-
リアルモードを有効にする。.
-
対応するジョイントポーズに移動 ボタンをタップしたままにして、ロボットジョイント角度を調整する。
移動する基準座標の設定
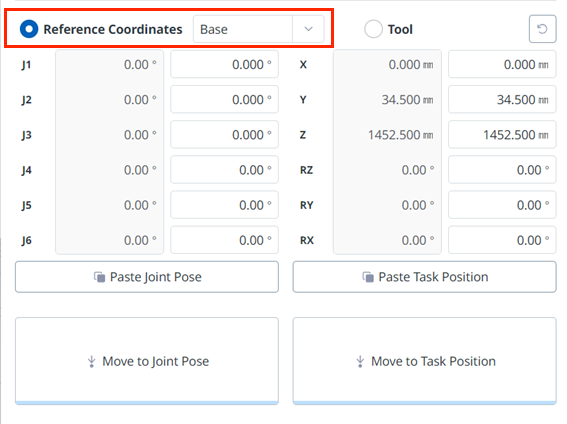
ベース座標に基づいてロボットを移動するには、次の手順を実行する。
-
移動(Move) タブと 基準座標(Reference Coordinates)を選択する。.
-
ベースとして表示座標を選択する。
-
[対応するタスクポーズに移動] ボタンをタップしたままにして、設定した座標に移動する。
移動するワールド座標の参照座標の設定
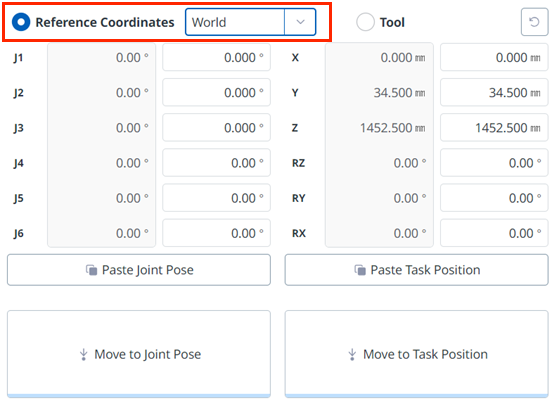
ワールド座標に基づいてロボットを移動するには、次の手順を実行する。
-
移動(Move) タブと 基準座標(Reference Coordinates)を選択する。.
-
表示座標として[ワールド(World)]を選択し、[ワールド(World)]タブを選択する。
-
ワールド座標を参照して移動するようにポーズを設定する。
-
[対応するタスクポーズに移動] ボタンをタップしたままにして、設定した座標に移動する。
ツールに基づいて移動する座標の設定
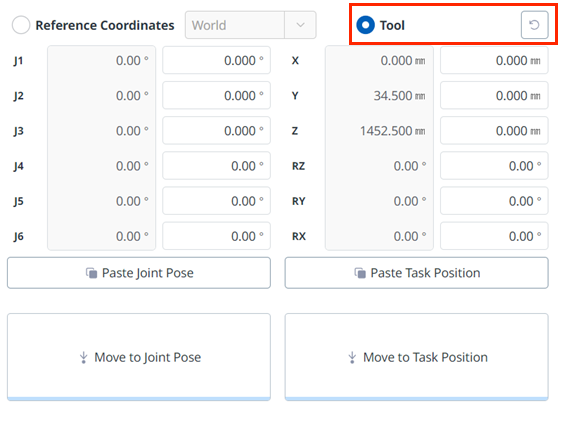
工具座標に基づいてロボットを移動するには、次の手順を実行する。
-
[移動(Move)] タブを選択し、[ 工具(Tool)] タブを選択する。
-
ツールを参照して移動するようにポーズを設定する。
-
[対応するタスクポーズに移動] ボタンをタップしたままにして、設定した座標に移動する。