外部機器の接続-ビジョンセンサー
ロボットはビジョンセンサ(物体位置測定用の2Dカメラ)と接続でき、ビジョンセンサの測定値をネットワーク経由でロボットに転送してロボットのコマンドとリンクすることができる。
ビジョンセンサーの設定
-
通信接続の設定
装置のLANポートを接続し、TCP/IP通信を適用してビジョンセンサーの測定値をロボットに転送する。( ネットワーク接続を参照)ビジョンセンサーのIPアドレスをTCP/IP 192.168.137.xxx帯域に設定して、TCP/IP通信を許可する。
-
ビジョンワーク設定
対象物の位置測定を行うためには,ビジョンセンサを用いて対象物の画像入力と視覚ティーチングを行う必要がある。ビジョンセンサメーカーが提供する専用のビジョン作業設定プログラムを参照すること。
-
測定データ形式の設定
ロボット作業でビジョンセンサの測定データを使用するためには、ビジョンロボットの座標キャリブレーションを行う必要があり、これはビジョンセンサ設定プログラムを使用して作業を開始する前に行う必要がある。ビジョンセンサの測定データは、次のフォーマット設定を使用して転送する必要がある。
|
フォーマット |
pos |
、 |
x |
、 |
y |
、 |
アングル |
、 |
var1 |
、 |
var2 |
、 |
… |
|---|
-
位置:測定データの開始を示す区切り文字(プレフィックス)
-
x:ビジョンセンサを使用して測定されたオブジェクトのX座標値
-
y:ビジョンセンサを使用して測定されたオブジェクトのY座標値
-
角度:ビジョンセンサーを使用して測定されたオブジェクトの回転角度値
-
var1…ヴァルナ:ビジョンセンサを使用して測定された情報(例:オブジェクトの寸法/欠陥チェック値)の例)pos、254.5、-38.1、45.3、1,50.1(説明:x=254.5、y=-38.1、角度=145.3、var1=1、var2=50.1)
ロボットプログラムの設定
ビジョンセンサとロボット間の物理的な通信接続とビジョンセンサの設定が完了したら、ビジョンセンサとロボットプログラムをリンクできるようにプログラムを設定する必要がある。Doosan Robot Language(DRL)を使用して外部ビジョンセンサの機能を接続/通信/制御することが可能であり、Task Writerでプログラムを設定することが可能である。
外部ビジョンセンサー機能に関する斗山ロボット言語(DRL)の詳細と包括的な例はプログラミングマニュアルに記載されている。
外部デバイスの接続–DARTプラットフォーム
DART Platformは、Windows OSベースのデスクトップまたはラップトップ上で動作するソフトウェアである。コントローラとデスクトップ/ラップトップがLANポートを介して接続されると、ティーチペンダントのすべての機能はDARTプラットフォームが実行された時点から使用可能になる。その際、コントローラ内のサブコントローラと接続するには、以下の設定手順が必要となる。
IPアドレスの検索と接続の設定
-
通信接続の設定
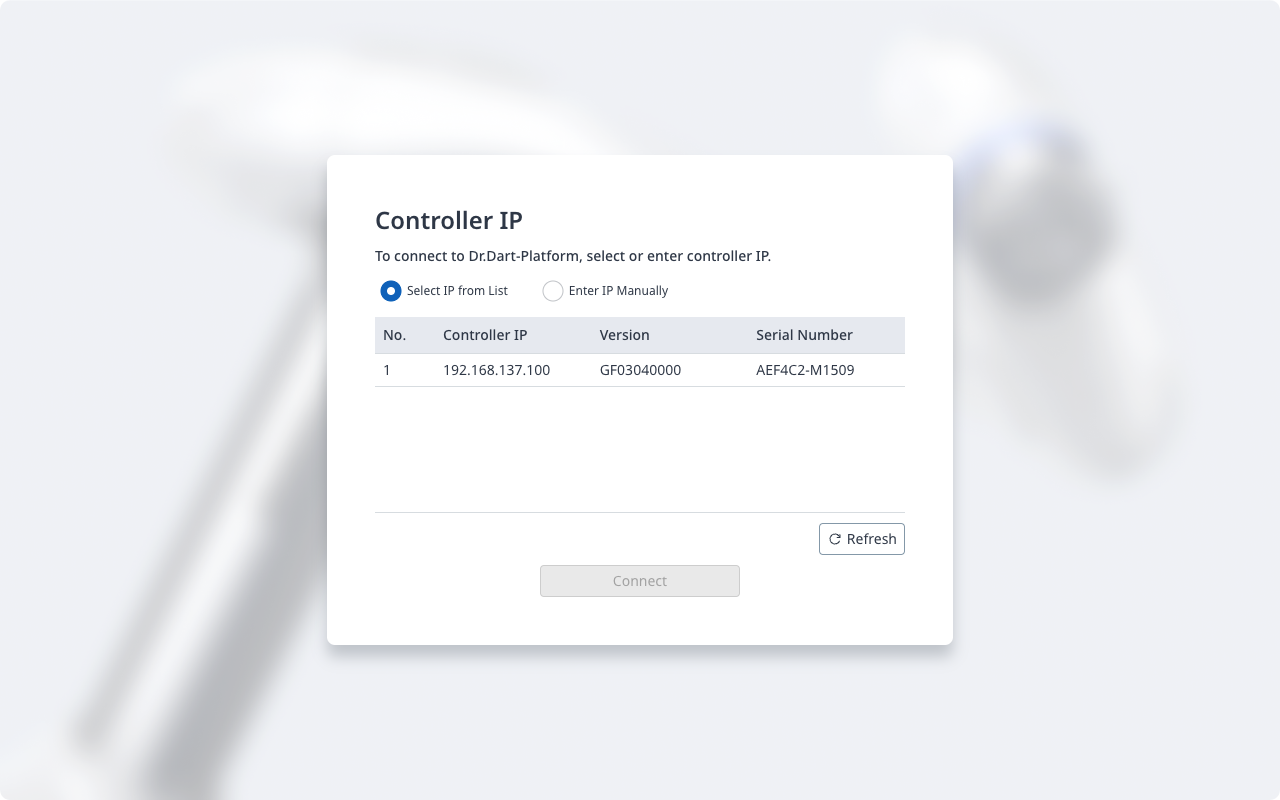
コントローラのLANポートにラップトップを接続した後にDARTプラットフォームを実行すると、コントローラのIPアドレス、サブコントローラのバージョン情報、接続を確立するために必要なロボットシリアル番号が自動的に検索される。
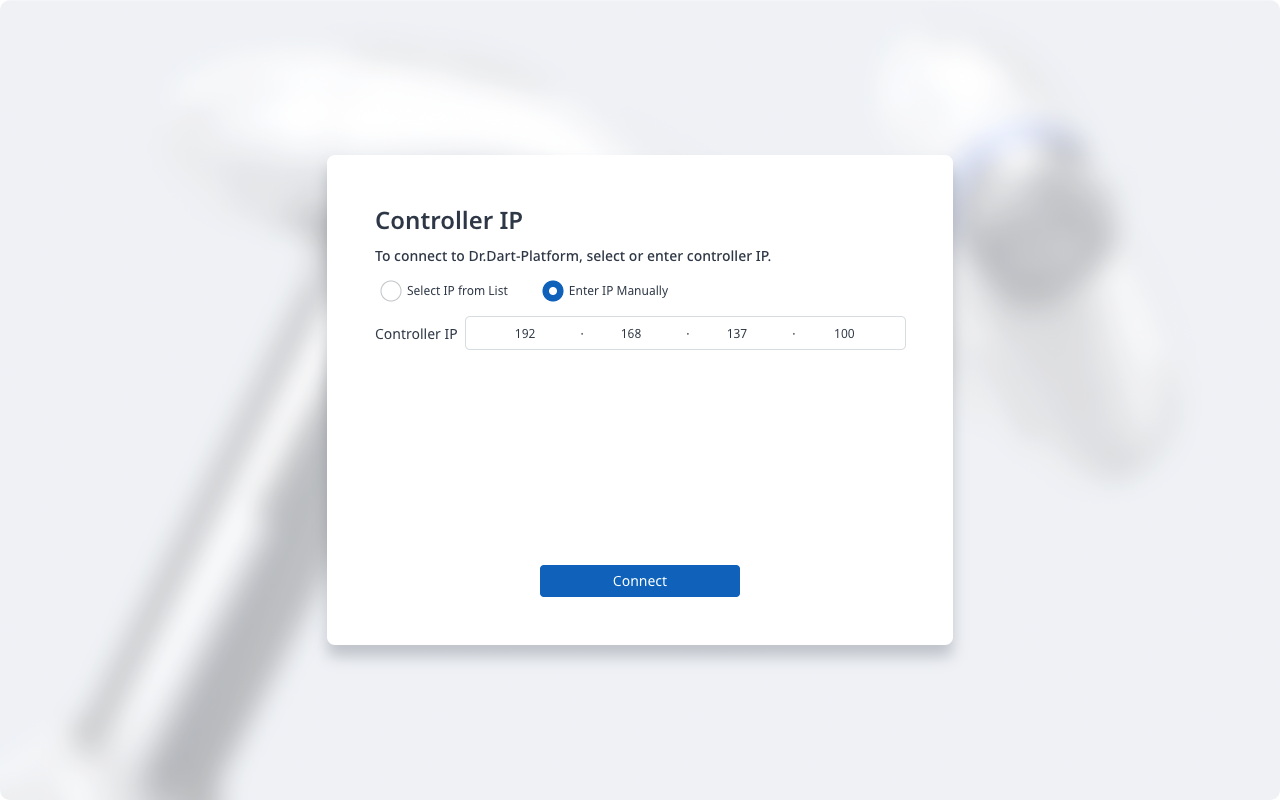
検索に失敗した場合は、Refreshボタンを押して更新するか、Enter IP ManuallyをタップしてコントローラのIPを手動で入力する。
接続するロボットのシリアル番号を選択し、[接続]ボタンを押すと、DARTプラットフォームとサブコントローラー間の接続が確立され、ロボットを正常に操作できるようになる。
接続に問題がある場合は、以下の手順を試してみるが、この問題が解決しない場合は、販売またはサービススタッフに連絡して支援を求める。
接続可能なコントローラのIPアドレス、サブコントローラのバージョン情報、およびロボットのシリアル番号の検索結果が表示されない場合:[リフレッシュ(Refresh)]ボタンを押して再度検索し、上記の手順に従って接続を再試行する。
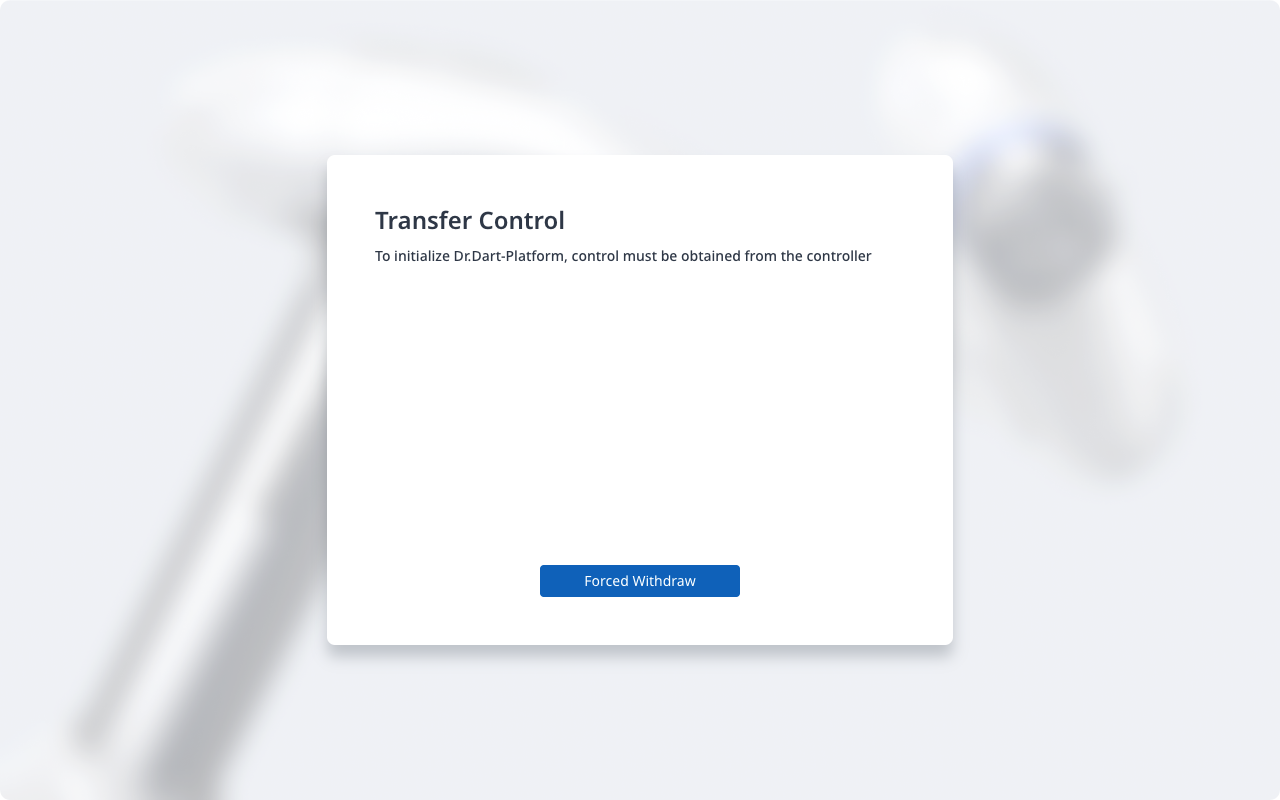
次に、以下のようにTransfer Controlページが表示された場合は、Forced Withdrawプラットフォームとの接続を試みるボタン。