Unknown Attachment
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
1 |
Wählen Sie den Bedienfeldtyp aus |
Sie können die Position der Schaltfläche "Verschieben" auswählen. |
|
2 |
3D-Simulation |
Dies ist die 3D-Anzeigefunktion, in der Sie sehen können, wie der Roboter aussieht. |
|
3 |
Ausrichtung Des Simulators |
In diesem Abschnitt können Sie den Simulator steuern. |
|
4 |
Inkrement Verwenden |
Mit dieser Schaltfläche können Sie Winkel- oder Positionsinkremente aktivieren. |
|
5 |
Winkelinkrement |
In diesem Abschnitt wird das Winkelinkrement auf der ausgewählten Achse festgelegt. |
|
6 |
Positionserhöhung |
In diesem Abschnitt wird das Positionsinkrement auf der ausgewählten Achse festgelegt. |
|
7 |
Kollision |
In diesem Feld wird die Roboterkollision festgelegt. |
|
8 |
Überwachung Erzwingen |
In diesem Abschnitt legen Sie die Kräfte in den X-, Y- und Z-Achsen basierend auf Basis, Werkzeug, Welt, Referenz und unter anderem fest. |
|
9 |
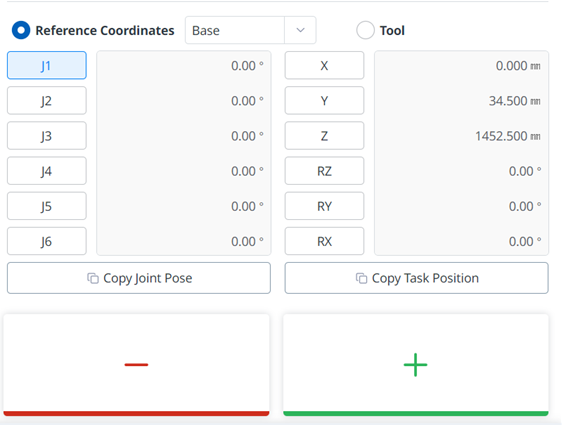
Wählen Sie das Referenzkoordinatensystem aus |
Wählen Sie das Referenzkoordinatensystem aus, das für die Aufgabenkoordinaten in Abbildung 11 verwendet werden soll. Sie können Basis-, Welt- oder Benutzerkoordinaten wählen. |
|
10 |
Verbindungsplatte |
Sie können die Verbindungsachse auswählen, die geknickt werden soll. |
|
11 |
Aufgabenbereich |
Sie können die zu knickende Aufgabenachse auswählen. |
|
12 |
Taste „Pose J kopieren“ |
Mit dieser Schaltfläche können Sie Pose J kopieren |
|
13 |
Schaltfläche „Pose X kopieren“ |
Mit dieser Schaltfläche können Sie Pose X kopieren. |
|
14 |
Verschieben - Schaltfläche |
Sie können den Roboter in Richtung - bewegen, basierend auf jeder Achse. Zu diesem Zeitpunkt können Sie die Richtung der - und + in der 3D-Simulation auf der linken Seite ermitteln. |
|
15 |
Taste Move + (Verschieben) |
Sie können den Roboter in die +-Richtung bewegen, basierend auf jeder Achse. Zu diesem Zeitpunkt können Sie die Richtung der - und + in der 3D-Simulation auf der linken Seite ermitteln. |
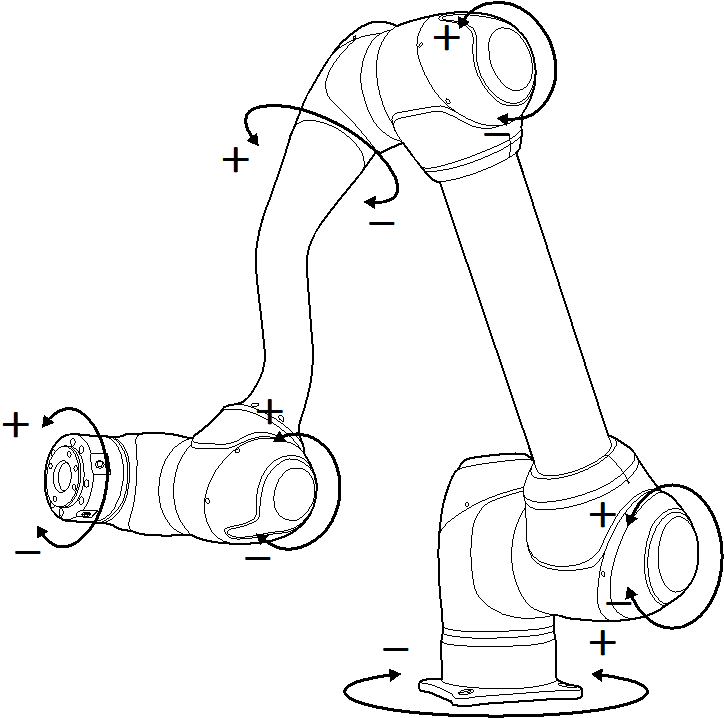
Ausführung basierend auf Roboterverbindung
Gehen Sie wie folgt vor, um den Winkel basierend auf der Roboterverbindung einzustellen:
-
Wählen Sie die Achse (J1-J6) aus, um den Winkel auf dem Verbindungsblech anzupassen.
-
Halten Sie die Richtungstasten (


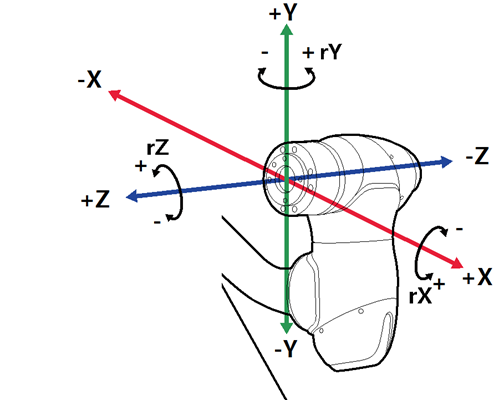
Ausführung basierend auf Roboterbasis
Führen Sie die folgenden Schritte aus, um den Roboter basierend auf seinen Basiskoordinaten zu verschieben:
-
Wählen Sie die Basis als Referenzkoordinatensystem aus.
-
Wählen Sie im Aufgabenbereich die Achse (X~RX) aus, für die Sie den Winkel anpassen möchten.
-
Halten Sie die Richtungstaste (+,-) gedrückt, um die entsprechende Achse zu verschieben.
Ausführung basierend auf Weltkoordinaten
Um den Roboter basierend auf Weltkoordinaten zu bewegen, führen Sie die folgenden Schritte aus:
-
Wählen Sie die Welt als Referenzkoordinatensystem aus.
-
Wählen Sie im Aufgabenbereich die Achse (X~RX) aus, für die Sie den Winkel anpassen möchten.
-
Halten Sie die Richtungstaste (+,-) gedrückt, um die entsprechende Achse zu verschieben.
Ausführung basierend auf Roboterwerkzeug
Gehen Sie wie folgt vor, um den Roboter basierend auf dem Roboterwerkzeug zu bewegen:
-
Wählen Sie das Werkzeug als Referenzkoordinatensystem aus.
-
Wählen Sie im Aufgabenbereich die Achse (X~RX) aus, für die Sie den Winkel anpassen möchten.
-
Halten Sie die Richtungstaste (+,-) gedrückt, um die entsprechende Achse zu verschieben.
Hinweis
-
Sicherheitsbereich gilt nicht im virtuellen Modus.
-
Rx, Ry und Rz werden gemäß TCP (Werkzeugmittelposition) ausgeführt.