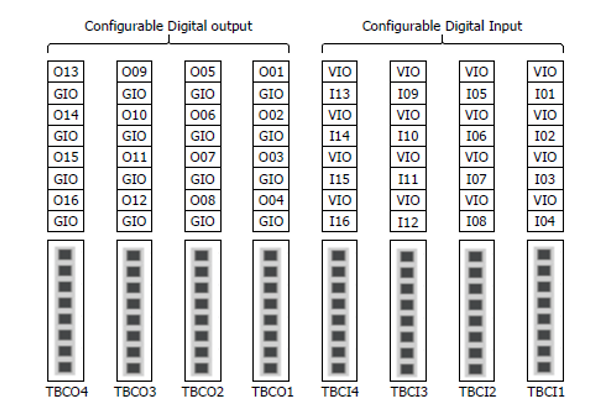
Der Controller ist mit 16 digitalen Eingängen und 16 digitalen Ausgängen konfiguriert. Die in der folgenden Abbildung gezeigten digitalen E/A können an Peripheriegeräte angeschlossen werden, die für die Robotersteuerung erforderlich sind, oder als redundante Sicherheits-E/A-Einheiten für Sicherheitssignal-E/A-Zwecke festgelegt werden.
Die elektrischen Spezifikationen der konfigurierbaren digitalen E/A lauten wie folgt:
|
Terminal |
Parameter |
Technische Daten |
|
|---|---|---|---|
|
Digitalausgang |
[Oxx] |
Spannung |
0–24 V |
|
[Oxx] |
Strom |
0–1 A |
|
|
[Oxx] |
Spannungsabfall |
0–1 V |
|
|
[Oxx] |
Leckstrom |
0–0,1 mA. |
|
|
Digitale Eingänge |
[Ixx] |
Spannung |
0–30 V |
|
[Ixx] |
AUSSERHALB des Bereichs |
0–5 V |
|
|
[Ixx] |
Bereich EIN |
11 - 30 V |
|
|
[Ixx] |
Strom |
2–15 mA |
|
Vorsicht
-
Die Anschlüsse VIO (IO 24V) und GIO (IO GND), die als Netzteile für digitale E/A verwendet werden können, sind von den anderen Netzteilen VCC (24V) und GND auf dem Sicherheits-E/A-Stromkreis getrennt. Gehen Sie vorsichtig vor, da die Diagnosefunktionen des Roboters Fehler erkennen und die Stromversorgung des Roboters unterbrechen, wenn das interne Netzteil über den Anschlussblock für digitale E/A-Stromversorgung (TBPWR) als digitale E/A-Stromversorgung angeschlossen ist oder wenn die 24-V-Stromversorgung nicht über ein externes Netzteil an die VIO- und GIO-Anschlüsse angeschlossen wird, funktioniert die konfigurierbare digitale E/A nicht.
Wenn konfigurierbare digitale E/A als allgemeine digitale E/A verwendet werden, kann sie auf verschiedene Weise verwendet werden, z. B. zum Betrieb von Niederstromgeräten wie Magnetventilen für Spannung oder zum Austausch von Signalen mit SPS-Systemen oder Peripheriegeräten. Im Folgenden wird beschrieben, wie die konfigurierbare digitale E/A verwendet werden kann:
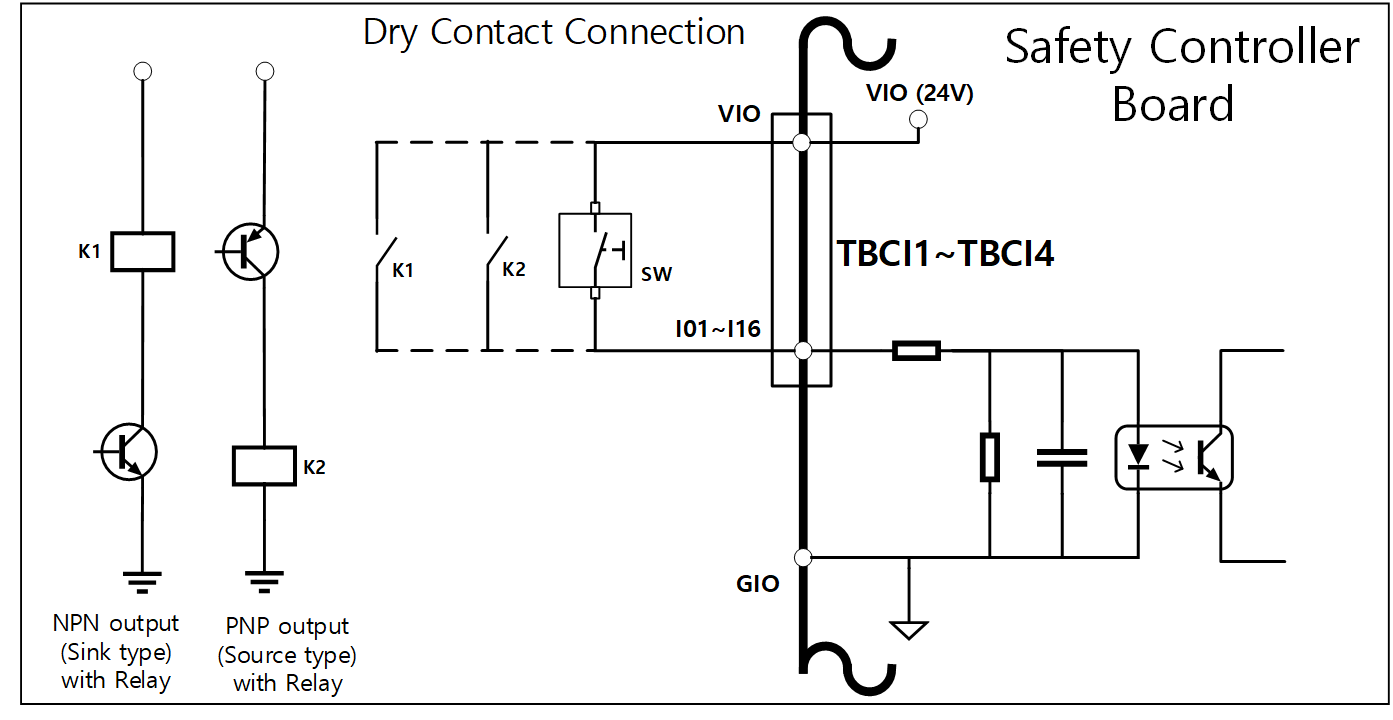
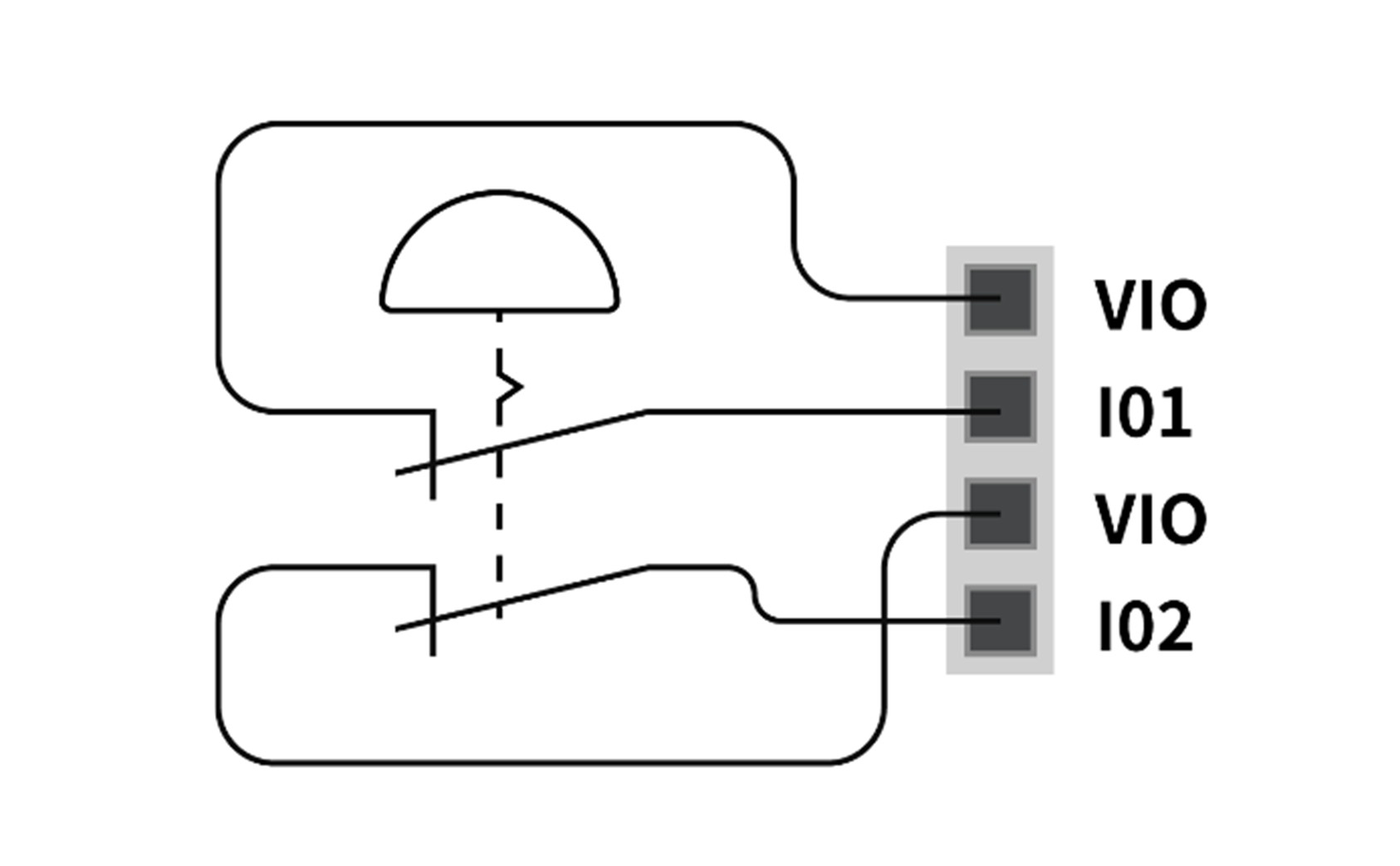
Wenn ein trockener Kontakteingang empfangen wird
Dies ist eine Methode zum Verbinden eines Schalters oder Kontakts zwischen dem VIO-Anschluss der Klemmenblöcke TBCI1-TBCI4 und Ixx. Der Ausgang des externen Geräts wirkt nur auf das Öffnen/Schließen des Kontakts durch das Relais und ist daher von externen Geräten elektrisch isoliert.
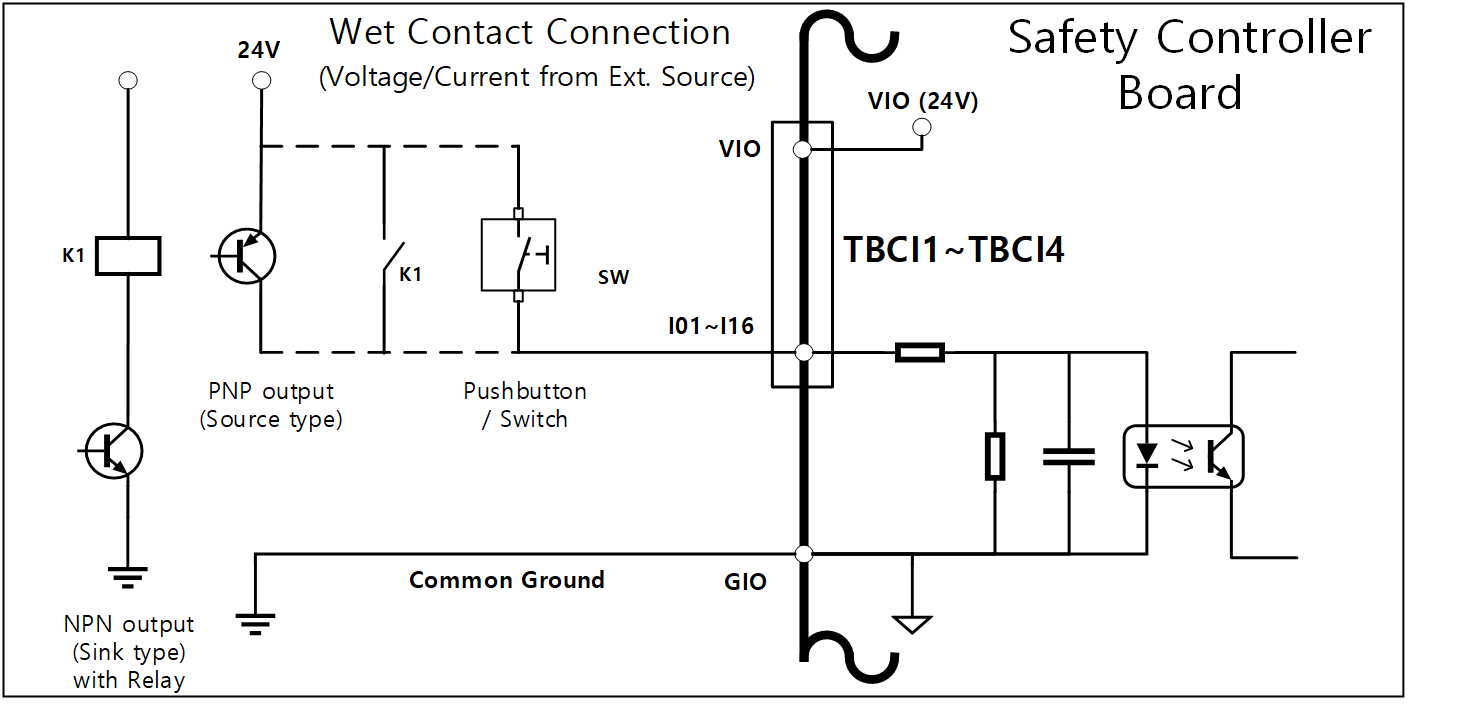
Wenn ein Kontakteingang mit nassem Kontakt empfangen wird
Es empfängt Spannungssignale von externen Geräten. Wenn der Ausgang des Zielgeräts vom Typ Quelle ist, erhält er eine Spannung von 24 V/0 V als Eingang. Wenn der Ausgang des Zielgeräts eine Senke ist, kann ein Relais hinzugefügt werden, um eine Eingangsspannung von 24 V/0 V zu erhalten. Da der Spannungseingang eine Referenz erfordert, müssen die externen Geräte und das externe Netzteil an eine gemeinsame Masse angeschlossen werden.
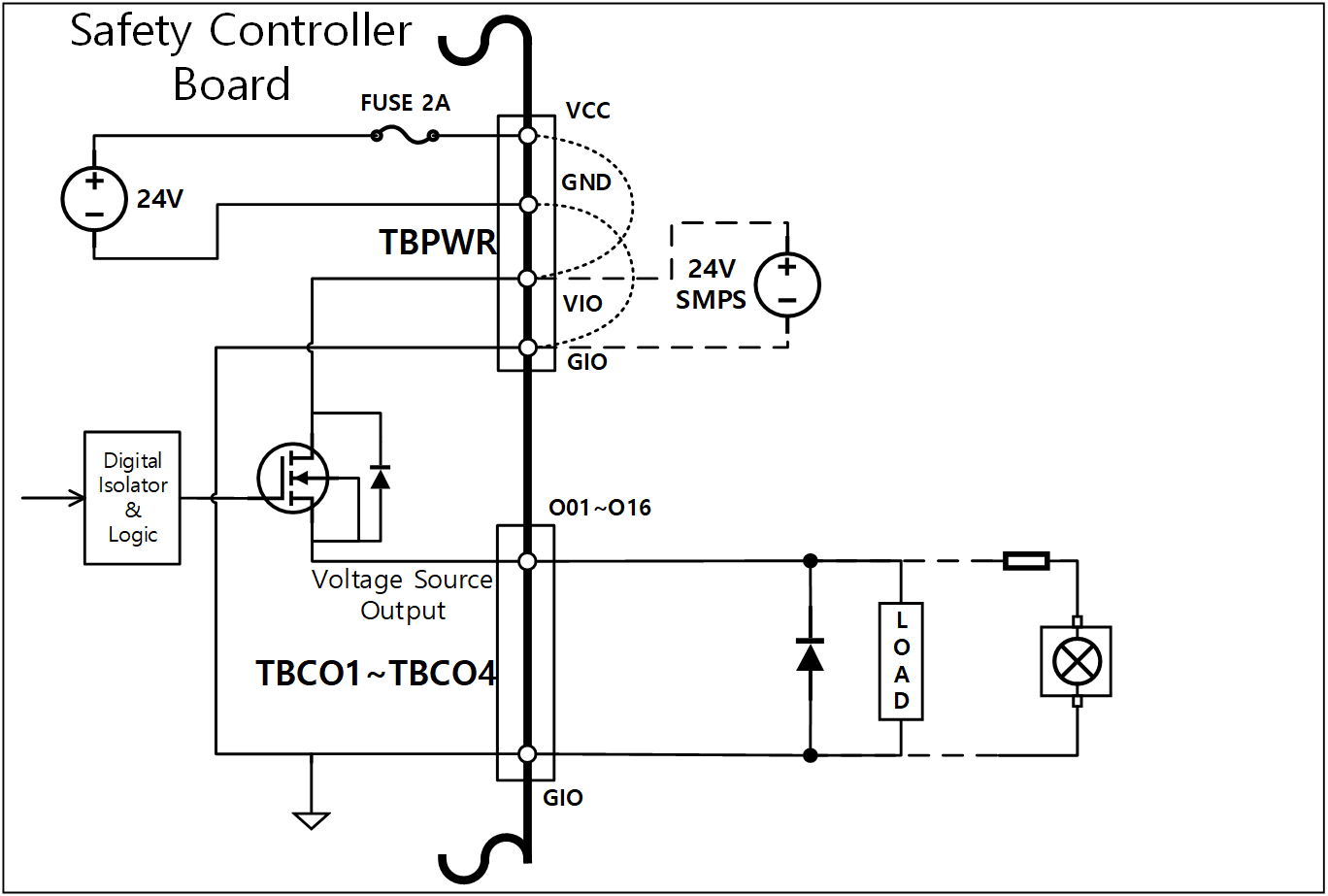
Wenn eine einfache Last betrieben wird
Es ist eine Methode zum Verbinden von Lasten zwischen Oxx-Klemmen der TBCO1-TBCO4-Klemmenblöcke und der GIO-Klemme. Jede Klemme kann maximal 1 A ausgeben, aber der Gesamtstrom kann je nach Heizwert und Last begrenzt werden.
Wenn die digitale E/A-Stromversorgung (VIO/GIO) wie in der Werksvorgabe über das interne Netzteil bereitgestellt wird, können bis zu 2 A VIO-Strom verwendet werden. Wenn ein Gesamtstrom von mehr als 2 A erforderlich ist, trennen Sie die Verbindung zwischen dem digitalen E/A-Netzteil (VIO/GIO) des Anschlussblocks für digitale E/A-Stromversorgung (TBPWR) und dem internen Netzteil (VCC/GND), und schließen Sie ein externes Netzteil an.
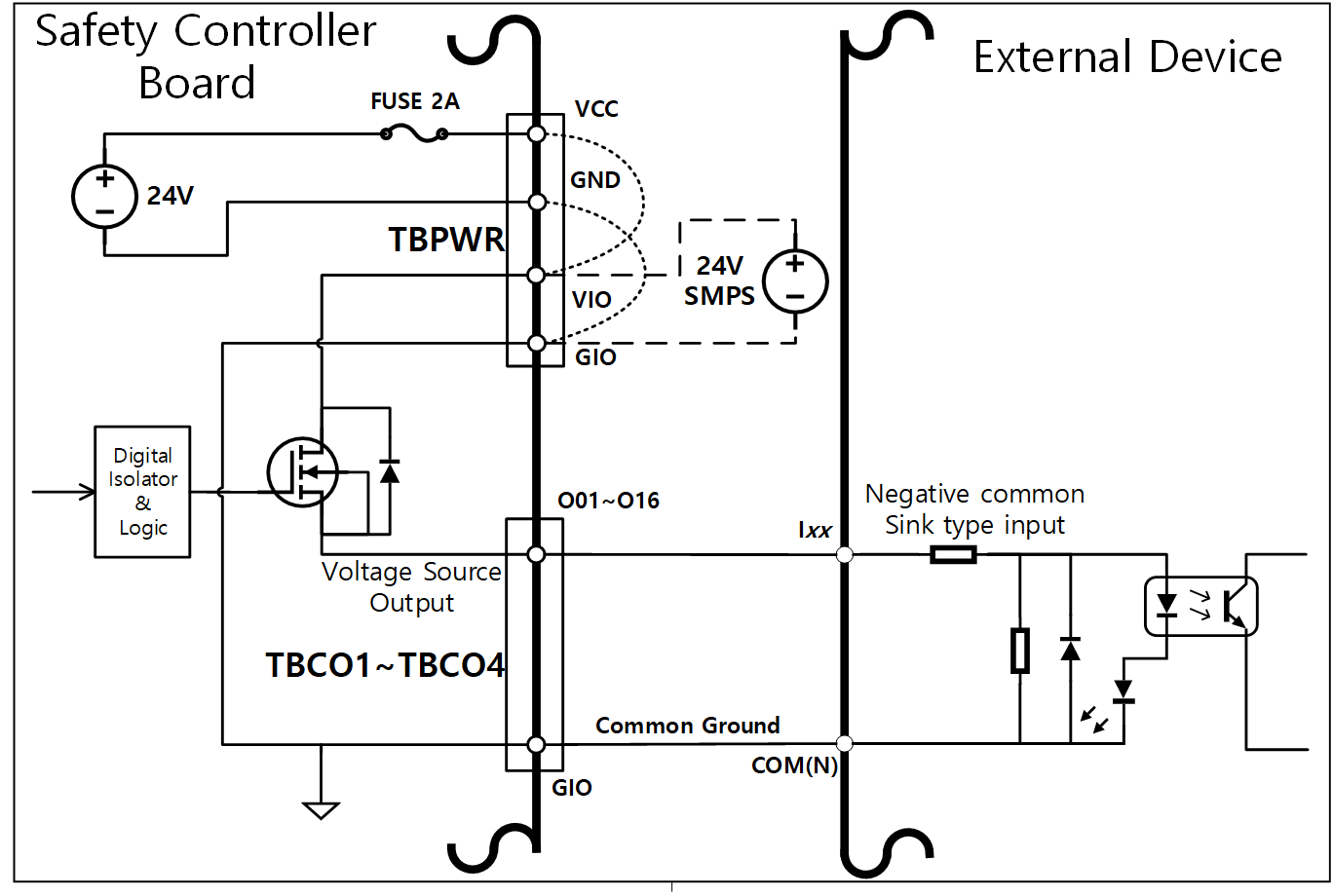
Wenn ein negatives Eingabegerät vom Typ Common & Sink angeschlossen ist
Wenn Sie den Ausgang des digitalen E/A an ein Senkenkeingangsgerät anschließen, verbinden Sie die Oxx-Klemmen der TBCO1 - TBCO4-Klemmenblöcke mit der Eingangsklemme des externen Geräts und verbinden Sie GIO mit der negativen gemeinsamen Masse des externen Geräts, um eine gemeinsame Masse herzustellen.
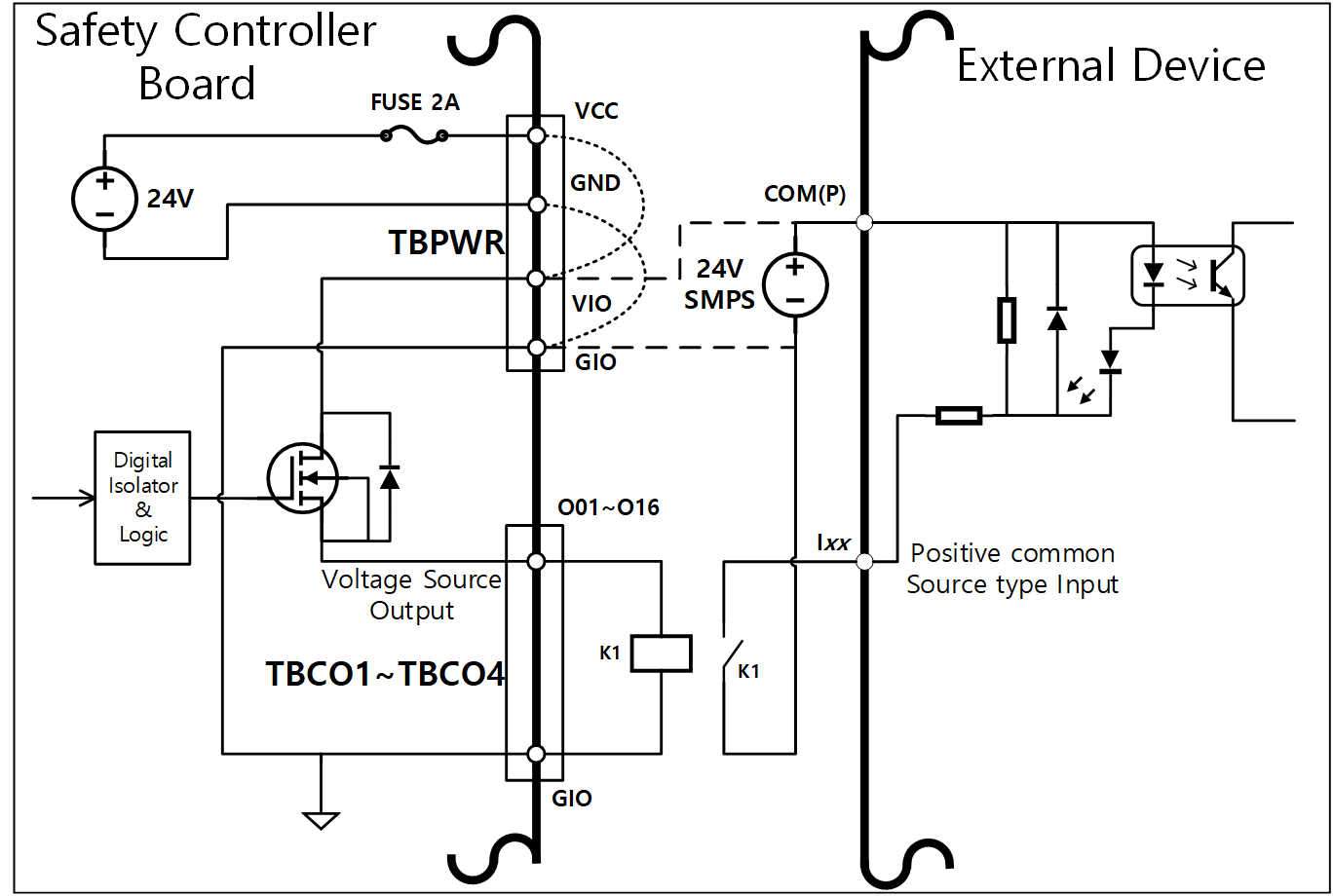
Wenn ein positives Eingangsgerät vom Typ Common & Source angeschlossen ist
Schließen Sie ein Relais zwischen der Oxx-Klemme der TBCO1-TBCO4-Klemmenblöcke und der GIO-Klemme an, um Eingangssignale als Kontakte an das externe Gerät zu liefern. Bei Bedarf kann ein externes Netzteil an das externe Gerät angeschlossen werden.
Vorsicht
-
Der Betrieb der allgemeinen digitalen E/A-Geräte kann jederzeit unterbrochen werden, indem die Stromversorgung der Steuerung unterbrochen wird, Fehler durch Selbstdiagnose erkannt und das Aufgabenprogramm eingestellt wird. Führen Sie daher eine Risikobewertung durch, bevor Sie die Arbeitszelle des Roboters konfigurieren, und stellen Sie sicher, dass Sie zusätzliche Sicherheitsmaßnahmen implementieren, wenn zusätzliche Risiken wie Herunterfallen des Werkstücks, Stoppen, Fahrlässigkeit des Digitaleingangs durch Ausschalten digitaler Ausgänge oder Synchronisierungsfehler aufgrund von Missverständnissen vorgesehen sind.
-
Der allgemeine digitale E/A ist ein E/A-Anschluss, und jeder Kurzschluss oder Ausfall kann zum Verlust von Sicherheitsfunktionen führen und kann daher nicht zu Sicherheitszwecken verwendet werden. Wenn der Anschluss einer Sicherheitsvorrichtung oder sicherheitsrelevanter Signal-E/A erforderlich ist, stellen Sie sicher, dass die entsprechende Klemme auf dem Programmierhandgerät als redundante Sicherheits-E/A eingestellt ist.
Wenn konfigurierbare digitale E/A als Sicherheits-E/A verwendet wird
O01 & O02, … , O15 & O16, I01 & I02, .. I15 und I16 können identische Sicherheitssignale verwenden, um einen zweifachen Sicherheits-E/A zu bilden
Die spezielle Eingangsklemme der Sicherheitskontakt-Ausgangsklemme (TBSFT) kann nur ein trockenes Kontaktsignal anschließen, aber der als Sicherheits-E/A eingestellte Eingang kann sowohl Kontaktsignale (trockener Kontakt) als auch Spannungssignale (Nasskontakt) verbinden. Der Ausgang, der auf Sicherheits-E/A eingestellt ist, gibt Spannung aus, bei Bedarf kann jedoch ein Relais extern hinzugefügt werden, um einen Ausgang vom Typ Kontakte zu konfigurieren.
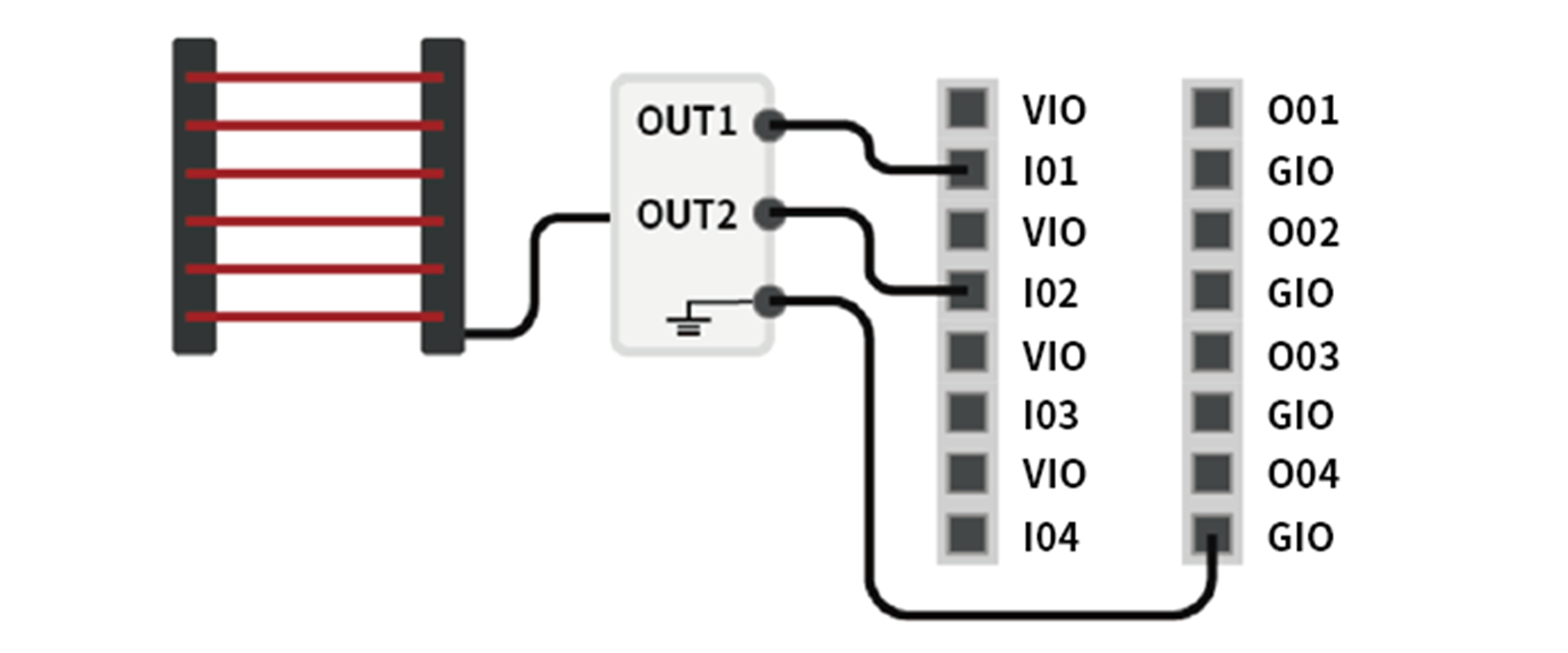
Im Folgenden wird ein Beispiel für das Anschließen einer Sicherheitsvorrichtung für den Betrieb gezeigt.
-
Schließen Sie einen Notschalter mit Kontaktkontakt (Trockenkontakt) als Sicherheitseingangsklemme an
-
Schließen Sie einen Spannungssignallichtvorhang (Nasskontakt) als Sicherheitseingangsklemme an (gemeinsame Masse).