Produkteinführung (CS-12P)
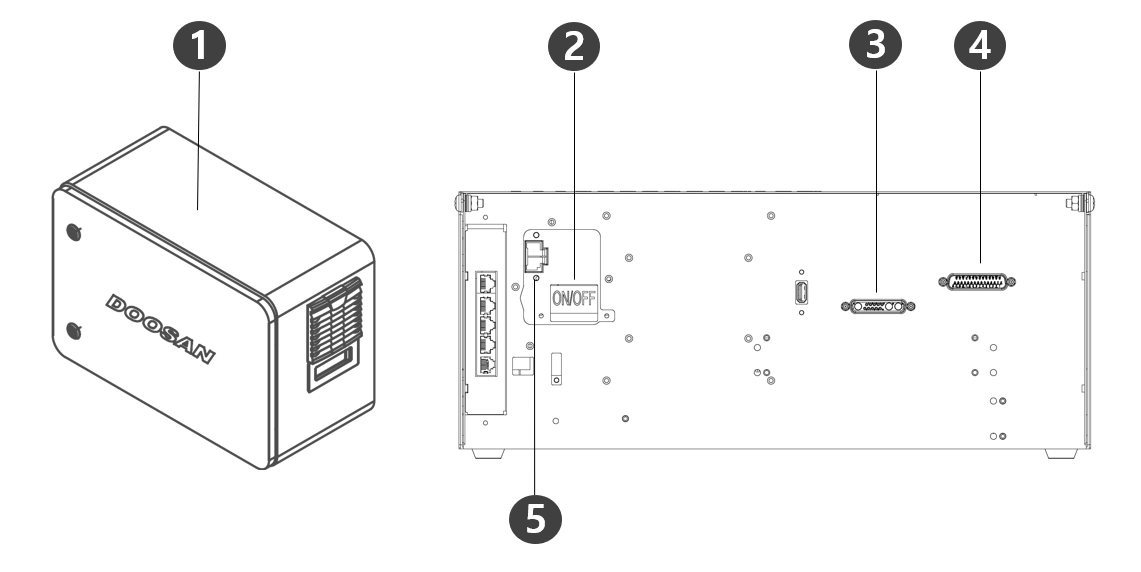
Name der einzelnen Teile und Funktionen
|
Nein |
Artikel |
Beschreibung |
|
1 |
E/A-Anschlussklemme (intern) |
Er kann mit Steuerungen oder Peripheriegeräten anderer Roboter verbunden werden. |
|
2 |
Ein-/Ausschalter |
Dient zum EIN-/AUSSCHALTEN der Hauptstromversorgung des Controllers. |
|
3 |
Anschlussklemme des Hängekabels programmieren |
Dient zum Anschließen des Programmierkabels an das Steuergerät. |
|
4 |
Anschlussklemme des Roboterkabels |
Dient zum Verbinden des Roboterkabels mit dem Steuergerät. |
|
5 |
Stromanschluss |
Dient zum Anschluss der Stromversorgung des Steuergeräts. |
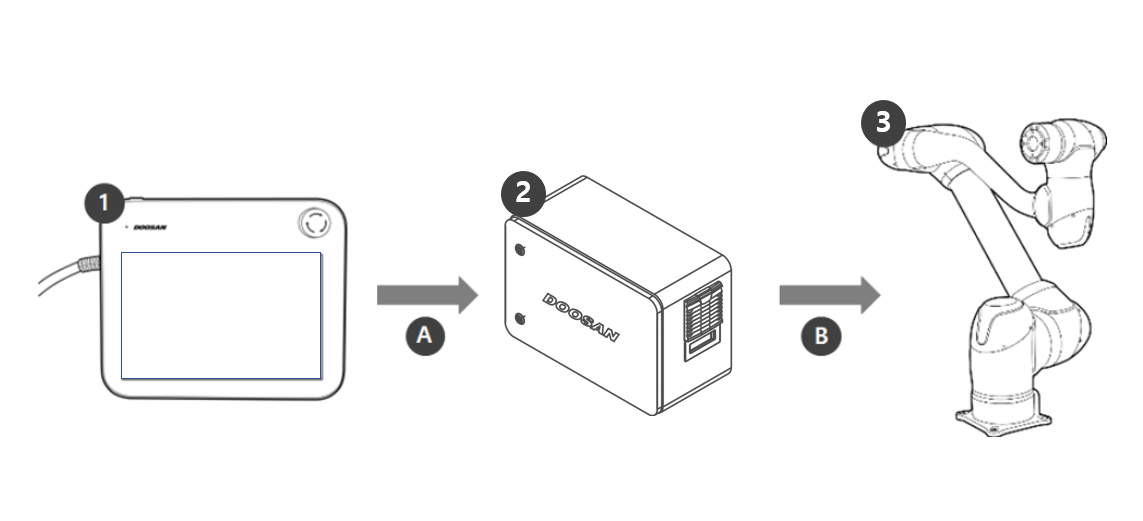
Systemkonfiguration
|
Nein |
Name |
Beschreibung |
|---|---|---|
|
1 |
Programmierhandgerät |
Dieses Gerät verwaltet das gesamte System und ist in der Lage, die Roboterpositionen zu lernen oder Einstellungen für die Manipulatoren und Steuergeräte vorzunehmen. |
|
2 |
Steuereinheit |
Er steuert die Bewegung des Roboters entsprechend der vom Programmierhandgerät eingestellten Position oder Bewegung. Es verfügt über verschiedene E/A-Ports, die den Anschluss und die Verwendung verschiedener Geräte und Geräte ermöglichen. |
|
3 |
Manipulator |
Es handelt sich um einen industriellen kollaborativen Roboter, der Transport- oder Montageaufgaben mit verschiedenen Werkzeugen ausführen kann. |
|
A |
Befehl/Überwachung |
|
|
B |
Stromversorgung/Netzwerk |
|
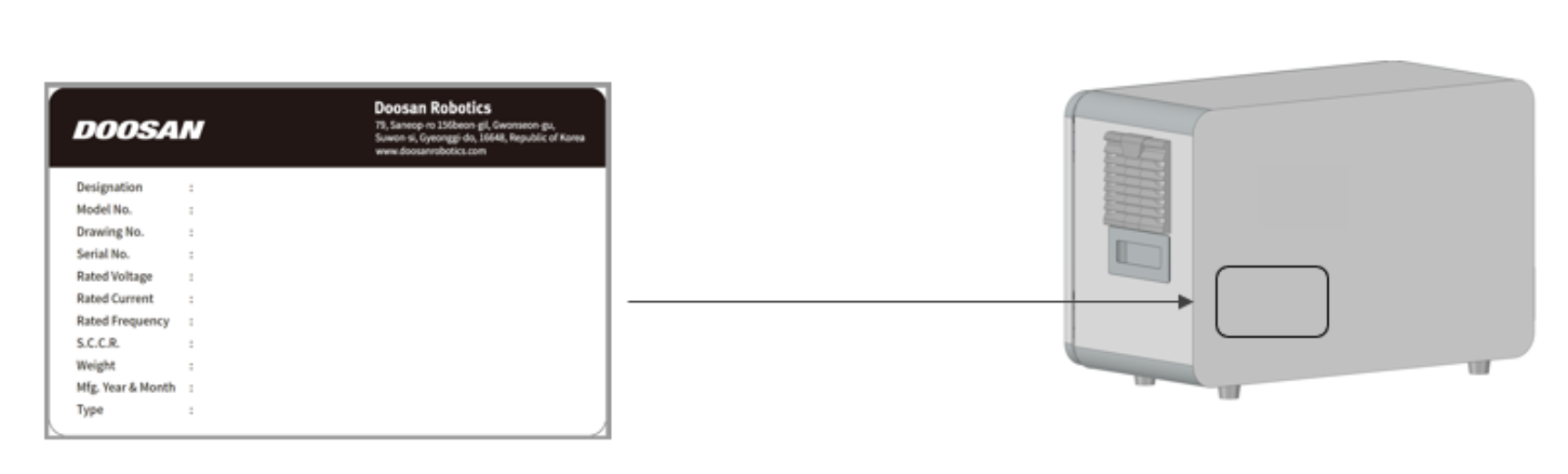
Typenschild und Etikett
Installation (CS-12P)
Vorsichtsmaßnahmen bei der Installation
Vorsicht
-
Sichern Sie ausreichend Platz, bevor Sie den Controller installieren. Wenn nicht genügend Platz gesichert ist, kann das Steuergerät beschädigt werden, oder das Kabel des Manipulators oder des Programmierhandgeräts ist zu kurz.
-
Überprüfen Sie das Eingangsnetzteil, wenn Sie das Gerät an die Stromversorgung anschließen. Wenn sich das angeschlossene Eingangsnetzteil von der Nennstromaufnahme (22–60 V DC) unterscheidet, funktioniert das Gerät nicht ordnungsgemäß, oder der Controller ist beschädigt.
Installationsumgebung
Beachten Sie beim Installieren des Controllers Folgendes:
-
Sichern Sie ausreichend Platz, bevor Sie den Controller installieren.
-
Die Steuerung muss fixiert sein.
-
Sicherstellen, dass keine Komponente im mobilen Fahrzeug befestigt ist.
Hardwareinstallation
Montieren Sie den Roboter, das Steuergerät und das Programmierhandgerät sowie die wichtigsten Komponenten des Systems, und versorgen Sie sie mit Strom, bevor Sie den Manipulator betätigen. Die Anweisungen zum Einbau der einzelnen Elemente lauten wie folgt:
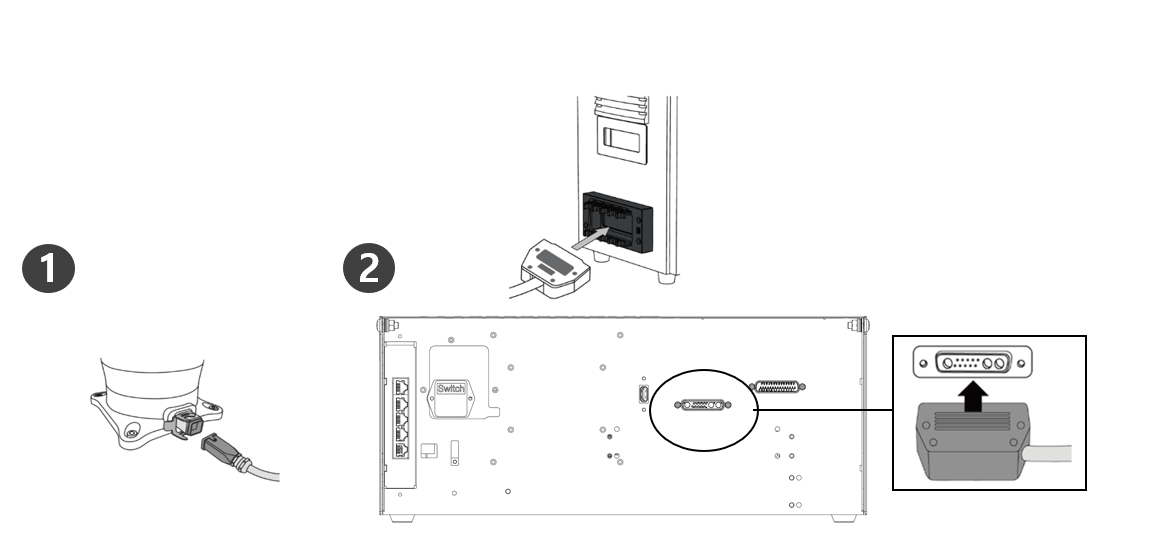
Manipulator mit Controller verbinden
|
|
Beschreibung |
|---|---|
|
1 |
Schließen Sie das Manipulatorkabel an die Steuerung an, und setzen Sie einen Sicherungsring ein
|
|
2 |
Verbinden des Verbindungskabels des Manipulators mit dem Steuergerät
|
Vorsicht
-
Trennen Sie das Manipulatorkabel nicht, während der Roboter eingeschaltet ist. Dies kann zu einer Fehlfunktion des Roboters führen.
-
Versuchen Sie nicht, das Manipulatorkabel zu modifizieren oder zu verlängern.
-
Bei der Montage des Controllers auf dem Boden muss auf jeder Seite mindestens 50 mm Abstand eingehalten werden, um eine ausreichende Belüftung zu gewährleisten.
-
Stellen Sie sicher, dass die Steckverbinder ordnungsgemäß verriegelt sind, bevor Sie das Steuergerät einschalten.
Hinweis
-
Bei der Konfiguration des Systems wird empfohlen, einen Geräuschminderer zu installieren, um Geräuscheffekte und Fehlfunktionen des Systems zu vermeiden.
-
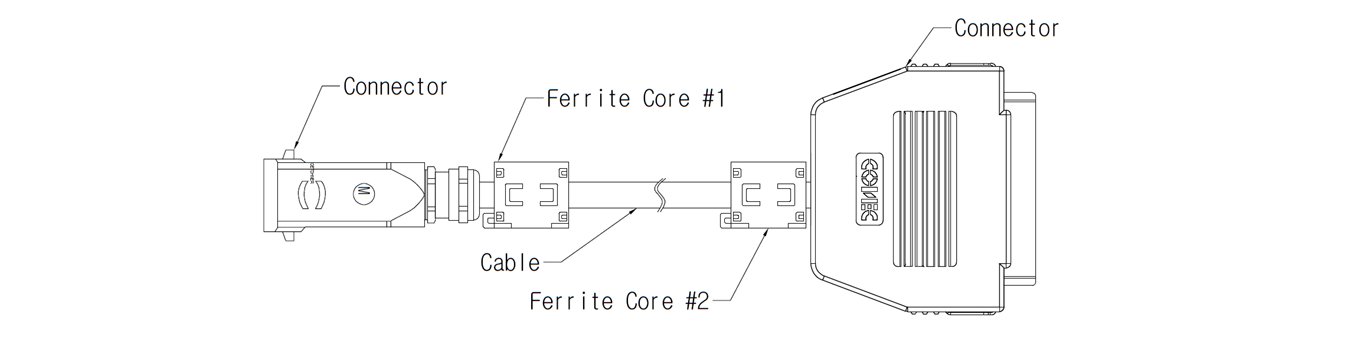
Wenn das Steuergerät durch elektromagnetische Wellen erzeugte Geräusche beeinflusst wird, muss ein Ferritkern installiert werden, um den normalen Betrieb sicherzustellen. Der Installationsort ist wie folgt:
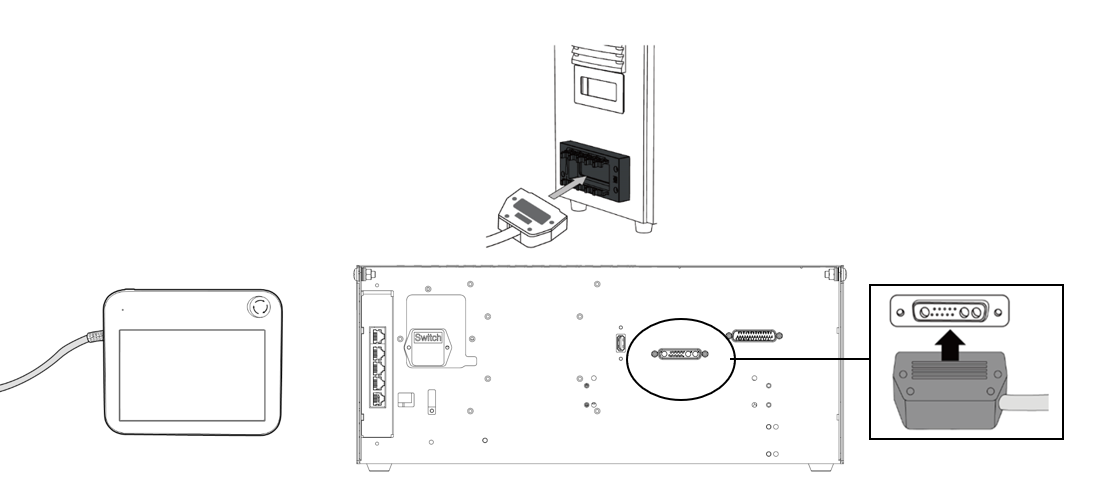
Verbinden Sie den Controller mit dem Programmierhandgerät
Schließen Sie das Programmierkabel an die entsprechenden Anschlüsse an der Steuerung an, bis es einrastet, und stellen Sie sicher, dass das Kabel fest eingesteckt ist.
Vorsicht
-
Prüfen Sie beim Anschließen des Kabels die Form der Verbindung, bevor Sie sie anschließen, damit sich der Stift nicht verbiegt.
-
Wenn das Programmierhandgerät am mobilen Fahrzeug oder an der Steuerung befestigt wird, darauf achten, dass die Verbindungskabel nicht herunterfallen.
-
Achten Sie darauf, dass das Steuergerät, das Programmierhandgerät und das Kabel nicht mit Wasser in Berührung kommen.
-
Installieren Sie das Steuergerät und das Programmierhandgerät nicht in einer staubigen oder nassen Umgebung.
-
Controller und intelligente Hängeeinheit dürfen niemals einer Staubumgebung mit einer Schutzart von IP20 ausgesetzt werden. Seien Sie besonders vorsichtig in Umgebungen mit leitfähigem Staub.
Hinweis
-
Bei der Konfiguration des Systems wird empfohlen, einen Geräuschminderer zu installieren, um Geräuscheffekte und Fehlfunktionen des Systems zu vermeiden.
-
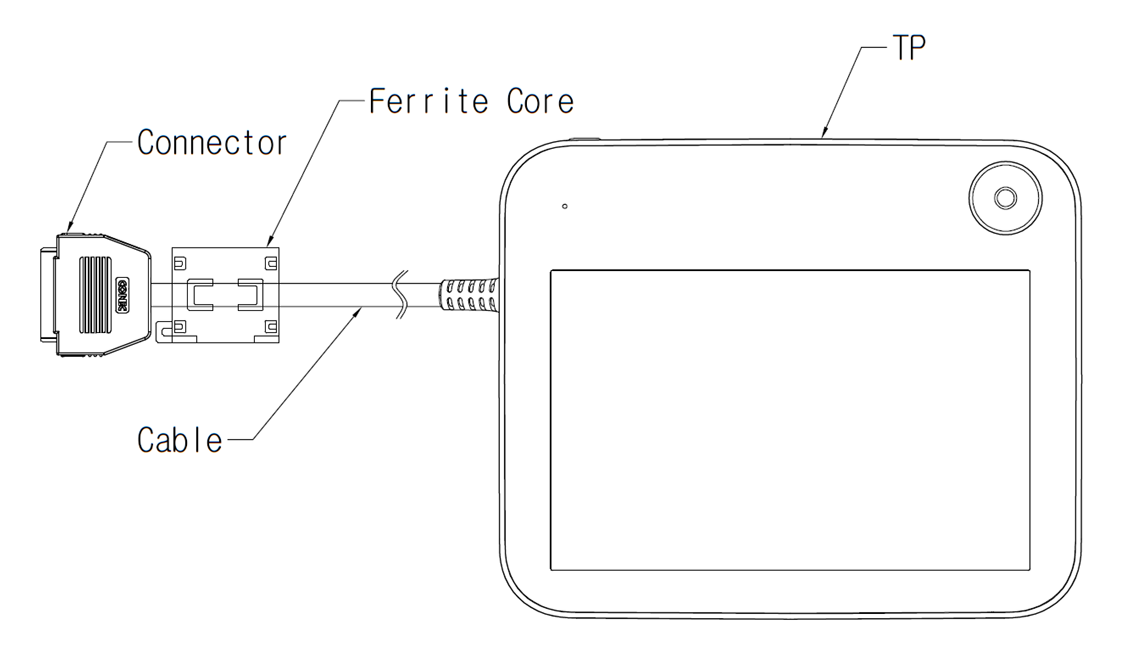
Wenn das Programmierhandgerät durch Geräusche beeinflusst wird, die durch elektromagnetische Wellen erzeugt werden, muss ein Ferritkern installiert werden, um einen normalen Betrieb sicherzustellen. Der Installationsort ist wie folgt:
Manipulatorkabel und Programmierkabel platzieren
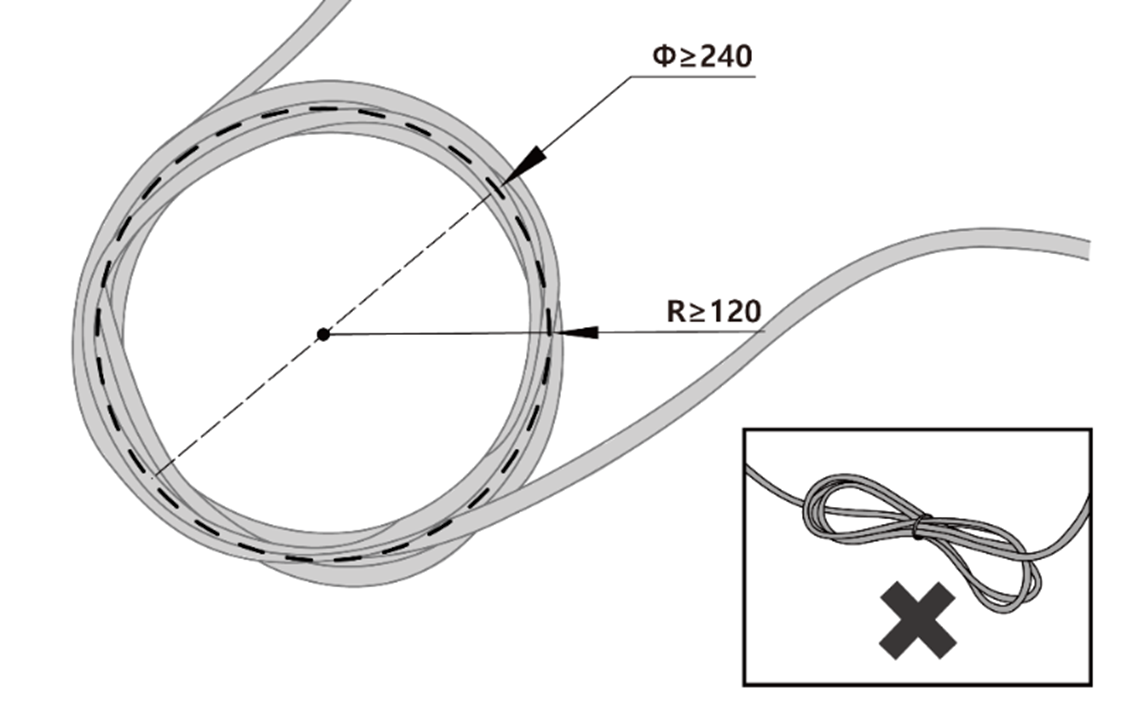
Stellen Sie sicher, dass der Krümmungsradius des Manipulators und des Programmierkabels größer ist als der minimale Krümmungsradius (120 mm).
Vorsicht
-
Stellen Sie sicher, dass der Krümmungsradius zwischen dem Programmierkabel und dem Programmierkabel größer ist als der minimale Krümmungsradius (120 mm).
-
Wenn der Krümmungsradius kleiner als der minimale Krümmungsradius (120 mm) ist, kann es zu Kabeltrennung oder Produktschäden kommen.
-
In Umgebungen, in denen elektromagnetische Störungen auftreten können, muss eine ordnungsgemäße Kabelinstallation durchgeführt werden, um Fehlfunktionen zu vermeiden.
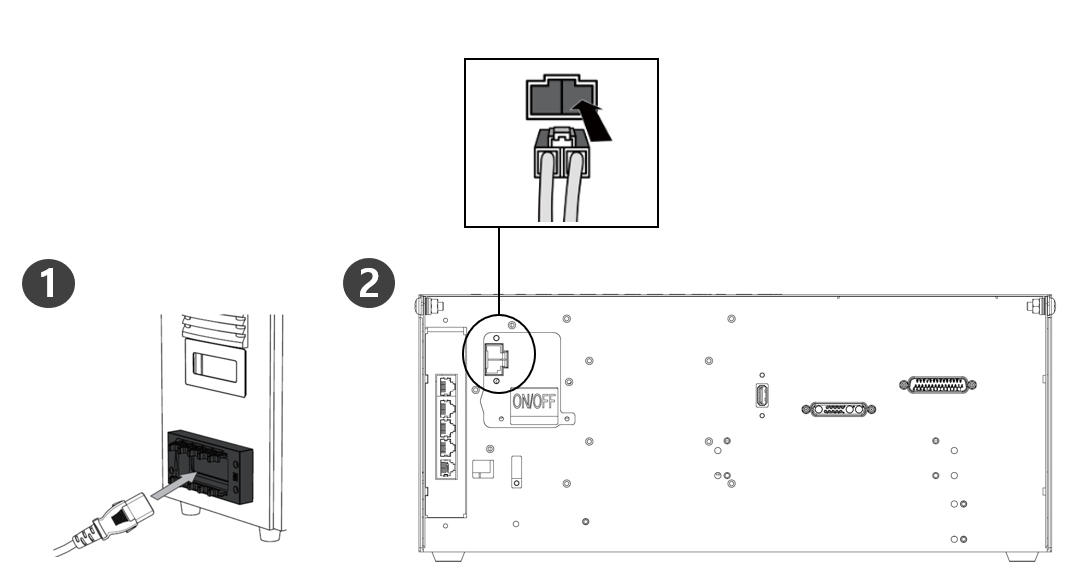
Anschließen der Stromversorgung an den Controller
Schließen Sie das Netzkabel an die entsprechenden Anschlüsse am Controller an, bis es hörbar einrastet. Vergewissern Sie sich, dass das Kabel fest eingesteckt ist.
Warnung
-
Stellen Sie sicher, dass der Roboter ordnungsgemäß geerdet ist, nachdem Sie die Stromkabel angeschlossen haben (elektrische Erdungsanschlüsse). Stellen Sie eine gemeinsame Masse für alle Geräte im System mit nicht verwendeten Schrauben im Zusammenhang mit dem Massesymbol im Steuergerät her. Der Erdungsleiter muss den maximalen Nennstrom des Systems erfüllen.
-
Schützen Sie die Eingangsleistung des Controllers mit Geräten wie einem Leistungsschalter.
-
Ändern oder verlängern Sie das Roboterkabel nicht. Dies kann zu einem Brand oder einem Ausfall der Steuerung führen.
-
Stellen Sie sicher, dass alle Kabel ordnungsgemäß angeschlossen sind, bevor Sie den Controller mit Strom versorgen. Verwenden Sie immer das Originalkabel, das im Lieferumfang enthalten ist.
-
Achten Sie darauf, dass die Polarität der Eingangsspannung nicht falsch angeschlossen wird.
Hinweis
-
Bei der Konfiguration des Systems wird empfohlen, einen Netzschalter zu installieren, mit dem alle Geräte gleichzeitig ausgeschaltet werden können.
-
Bei Verwendung eines Controllers für Gleichstrom kann die Bewegung des Roboters abhängig von Last und Bewegung eingeschränkt sein.
-
Wenn die Eingangsspannung weniger als 48 V beträgt, kann die Bewegung des Roboters je nach Last und Bewegung begrenzt sein.
-
Die Stromversorgung muss Mindestanforderungen wie Erdung und Leistungsschalter erfüllen. Die elektrischen Spezifikationen lauten wie folgt:
|
Parameter |
Technische Daten |
|
Eingangsspannung |
22 – 60 VDC |
|
Nenneingangsstrom |
30 A |