Backdrive unterbricht die Stromversorgung der Motoren und löst nur die Bremsen, damit sich die Gelenke des Roboters unter äußerer Kraft bewegen können.
Diese Funktion wird verwendet, wenn der Roboter im Wiederherstellungsmodus oder Handführung nicht in den normalen Status zurückkehren kann. Und im Backdrive- Modus kann der Benutzer die Bremse jedes Gelenks ein- oder ausschalten.
Auf das Backdrive-Modul kann über die Option Backdrive im oberen rechten Kopfzeilenmenü oder die ![]()
Unknown Attachment
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
1 |
Starten Sie Den Backdrive-Modus |
Mit dieser Schaltfläche können Sie den Backdrive-Modus ausführen. |
|
2 |
Beenden Sie Das Backdrive |
Mit dieser Schaltfläche können Sie das Backdrive-Modul beenden. |
|
3 |
Verbindungsbild |
Dies ist ein Bild, das die Position der einzelnen Gelenke beschreibt. |
|
4 |
Umschalttaste halten/loslassen |
Sie können wählen, ob sie für jede Verbindung aktiviert werden soll. |
Der Backdrive- Modus wird wie folgt eingestellt:
-
Tippen Sie im Hauptmenü auf die Schaltfläche Status .
-
Wenn die Rücklauftaste nicht aktiviert ist, wird sie durch Drücken und Loslassen der Not-aus-Taste oder Drücken der Servo-aus-Taste aktiviert.
-
Im eingeschalteten Zustand wird das folgende Popup-Fenster angezeigt, und das Servo wird automatisch deaktiviert.
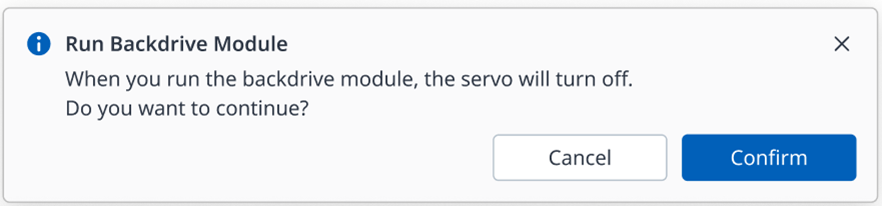
-
-
Tippen Sie auf die Schaltfläche Start Backdrive Mode (Backdrive-Modus starten ) auf dem Backdrive-Bildschirm.

-
Die AUS-/EIN-Taste wird aktiviert, um die Bremsen an jedem Gelenk zu lösen.
-
-
Stellen Sie die Bremse des Gelenks so ein, dass sie sich als AUS (loslassen) bewegt, und bewegen Sie den Roboter durch Aufbringen von Kraft.
-
Aufgrund des Verzögerungsverhältnisses des Verzögerungsgebers im Gelenk ist die Durchschlagsgeschwindigkeit des Gelenks aufgrund des Gewichts des Manipulators nicht hoch, und die Bewegungsgeschwindigkeit bei Krafteinwirkung ist ebenfalls nicht hoch.
-
Bei Fehlfunktionen des Verzögerungsgebers oder wenn sich Gelenke während der Schwerelosigkeit schneller als eine bestimmte Geschwindigkeit bewegen, werden die Bremsen aller Gelenke automatisch betätigt, um die Sicherheit zu gewährleisten.
-
-
Die Bremse EINSCHALTEN (Halten), wenn die Positionsänderung abgeschlossen ist.
-
Tippen Sie im Hauptmenü auf Power (ein), um das Betriebsprogramm herunterzufahren, halten Sie den Netzschalter oben auf dem Programmierhandgerät gedrückt, um das System herunterzufahren, und drücken Sie ihn erneut, um das System einzuschalten.
-
Der Status des Rücklaufwerks lautet „Freigegeben“, und die Arbeit kann normal fortgesetzt werden.
-
Hinweis
-
Jedes Gelenk einzeln in der Reihenfolge in den normalen Arbeitsbereich zurückbewegen.
-
Wenn der Backdrive-Modus ausgeführt wird, muss das System neu gestartet werden, um die normale Arbeit wieder aufzunehmen.
-
Bitte beachten Sie, dass je nach Position der Achse während des Backdrive- Modus ein vorübergehendes Durchhängen auftreten kann.