I/O-Alias
Unknown Attachment
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
1 |
Controller Digital E/A |
Der Name des digitalen E/A-Controllers kann individuell eingestellt werden. |
|
2 |
Flansch, digitale E/A |
Der Name der digitalen Flansch-E/A kann individuell festgelegt werden. |
|
3 |
Analoger E/A-Controller |
Der Name des analogen E/A-Controllers kann individuell eingestellt werden. |
|
4 |
Flansch, Analogeingang |
Der Name des analogen Flanschs kann individuell festgelegt werden. |
|
5 |
I/O-Name |
Der Name kann bis zu 40 Zeichen lang sein. |
Montieren
Die Position für die Roboterinstallation kann im Menü „Roboterinstallation Pose (Mount)“ eingestellt werden. Wenn der Roboter auf einer Ebenen Fläche installiert ist, kann dieser Schritt übersprungen werden.
Die Position der Roboterinstallation kann unter Roboterparameter > Robotereinstellungen > Mount festgelegt werden.
-
Der Einbauwinkel kann mit der automatischen Messfunktion gemessen werden. Wenn der Winkel jedoch weniger als 5 Grad beträgt, ist die automatische Messung nicht verfügbar.
-
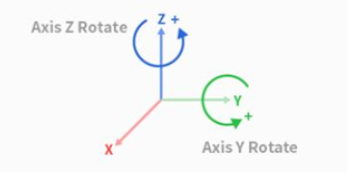
Wenn der Roboter an der Decke oder Wand installiert ist, kann der Montagewinkel des Roboters mit Drehungen der Y-Achse und der Z-Achse eingestellt werden.
-
Da die automatische Berechnung des Werkzeuggewichts auf der Grundlage der Schwerkraft durchgeführt wird, wird empfohlen, das Werkzeuggewicht nach der Einstellung der Montage zurückzusetzen.
Vorsicht
Beim Einstellen der Roboterposition (Halterung) wird empfohlen, auch die Weltkoordinaten zu ändern. Wenn die Weltkoordinaten nicht geändert werden, wird die Roboterposition auf dem Bildschirm des Robotersimulators der Programmierhandstation als der Roboter angezeigt, der auf der Ebenen Fläche installiert wird (Basis).
Unknown Attachment
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
1 |
Umschalttaste Sperren |
Dient zum Sperren des eingestellten Werts. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
|
2 |
Verwenden Sie Mount |
Schaltfläche, um die Verwendung von Mount zu aktivieren. Taste ist nach dem Entriegeln verfügbar. |
|
3 |
Automatische Messung |
Dadurch wird ein Befehlsvorgang automatisiert. Die 3D-Simulation daneben zeigt diese Bewegung. |
|
4 |
Informationsbild |
Dies ist ein Bild, das Ihnen über den Mount erzählt. |
|
5 |
Informationsmeldung |
Dies ist eine Meldung, die Sie über die automatische Messung informiert. |
|
6 |
Schaltfläche Inkrement/Decrement (Erhöhen/Verringern) |
Auf diese Weise können Sie beliebig viel erhöhen oder verringern. |
|
7 |
Eingabefeld Y-Achse drehen |
Der Rotationswinkel der Y-Achse kann direkt eingegeben werden. |
|
8 |
Eingabefeld Z-Achse drehen |
Der Drehwinkel der Z-Achse kann direkt eingegeben werden. |
|
9 |
Schaltfläche Anwenden |
Dadurch können die eingestellten Werte angewendet werden. |