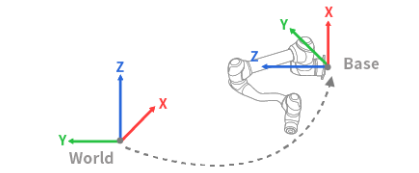
Weltkoordinaten
Die Weltkoordinaten des Roboters können über Weltkoordinaten festgelegt werden. Wenn die Roboterkoordinate die Basiskoordinaten ist, kann dieser Schritt übersprungen werden.
Weltkoordinaten können unter Roboterparameter > Robotereinstellungen > Weltkoordinaten festgelegt werden.
-
Weltkoordinaten werden verwendet, wenn der Montageort der Roboterbasis physisch verschoben/gedreht wird.
-
Durch Ändern der Weltkoordinaten wird dieselbe Bewegung/Drehung auf den Bildschirm des Robotersimulators angewendet.
Hinweis
Weltkoordinaten können auch verwendet werden, nachdem die Position und der Winkel der Basis nach dem Programmieren des Roboters geändert wurden. Wenn die Koordinaten von Aufgaben, die in der Vergangenheit durch das Programmieren von Robotern erzeugt wurden, von BASIS zu WELT geändert werden, wird ein Offset angewendet, der der Bewegung/Drehung von Weltkoordinaten entspricht.
Unknown Attachment
Unknown Attachment
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
1 |
Umschalttaste Sperren |
Dient zum Sperren des eingestellten Werts. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
|
2 |
Informationsbild |
Dies ist ein informatives Bild, das für die Einstellung erforderlich ist. |
|
3 |
Informationsmeldung |
Dies ist eine informative Meldung, die für die Einstellung erforderlich ist. |
|
4 |
Montageposition |
Dieser Abschnitt enthält die Werte für die Einhängeposition für Rz, Ry und Rx. |
|
5 |
Einstellungen für Punkt, Linie und Ebene |
Hier können Sie die gewünschten Elemente zwischen Punkt, Linie und Ebene auswählen und festlegen. |
|
6 |
Lehrleitfaden |
Dies ist eine Anleitung zum Einrichten von Punkt, Linie und Ebene. |
|
7 |
Koordinaten |
Hier können Sie die gewünschte Koordinate zwischen Basis und Welt auswählen. |
|
8 |
Einstellung Punkt 1 |
Hier können Sie die Einstellungen für jede der 6 Achsen festlegen sowie Pose und Move to erhalten. |
|
9 |
Schaltfläche Lernpunkte anwenden |
Mit dieser Schaltfläche können Sie die gewünschten Einstellungen eingeben und anwenden. |
|
10 |
Koordinaten von Welt zu Basis zurücksetzen |
Mit dieser Schaltfläche können Sie die bereits eingegebenen Koordinaten der Welt auf Basis zurücksetzen. |
|
11 |
Einstellung „Welt zu Basis“ |
Hier können Sie Einstellungen für die 6 Achsen eingeben. |
|
12 |
Schaltfläche Anwenden |
Der Einstellwert kann angewendet werden. |
Benutzerkoordinaten
Unknown Attachment
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
1 |
Neu Hinzufügen |
Mit dieser Schaltfläche können Sie die ausgewählte Benutzerkoordinate löschen. Es können bis zu 100 Benutzerkoordinaten hinzugefügt werden. |
|
2 |
Löschen |
Mit dieser Schaltfläche können Sie die ausgewählte Benutzerkoordinate löschen. |
|
3 |
Ausgewählte Benutzerkoordinaten |
Dies ist eine Liste der hinzugefügten Benutzerkoordinaten. |
|
4 |
Name Der Benutzerkoordinaten |
Hier können Sie die Namen der Benutzerkoordinaten festlegen. Es kann eine Zahl von 101 bis 200 mit einer maximalen Länge von 40 Zeichen eingegeben werden. |
|
5 |
Einstellungen für Punkt, Linie und Ebene |
Hier können Sie jeden Punkt, jede Linie und jede Ebene festlegen. |
|
6 |
Informationssymbol |
Eine Anleitung zu Benutzerkoordinaten wird bereitgestellt. |
|
7 |
Koordinaten |
Hier können Sie entweder Basis oder Welt als Basis für den gewünschten Wert auswählen. |
|
8 |
Einstellung Punkt 1 |
Hier können Sie Werte für jede der 6 Achsen von Punkt 1 eingeben und Pose abrufen oder verschieben zu ausführen. |
|
9 |
Lernpunkte Anwenden |
Mit dieser Schaltfläche können die gewünschten Werte nach der Eingabe angewendet werden. |
|
10 |
Benutzerkoordinaten |
Im Abschnitt Benutzerkoordinaten können Sie jeden der gewünschten Werte eingeben. |
|
11 |
Speichern |
Mit dieser Schaltfläche können die Einstellwerte gespeichert werden. |