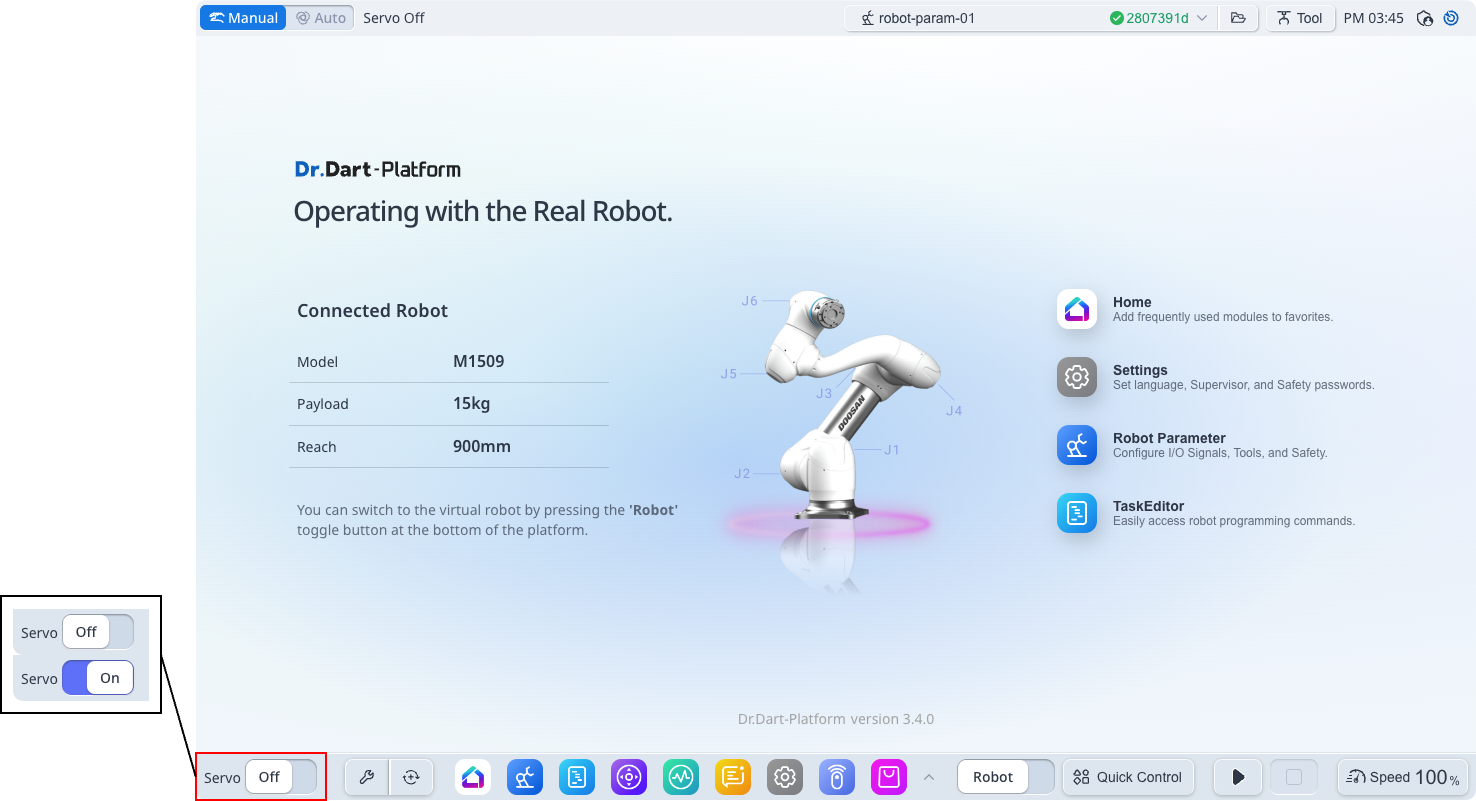
Servo ein bezieht sich auf einen Standby-Zustand, in dem der Roboterarm durch die Stromversorgung des Gelenks angetrieben werden kann. Servo aus, wenn ein Not-aus-Taster gedrückt wird oder eine Sicherheitseinschränkung verletzt wird. Im Status Servo aus wird das Gelenk ausgeschaltet und der Roboterarm kann nicht gefahren werden. Im Hauptmenü ist der Task-Editor , Jog Plus, der mit dem Roboterarmantrieb verknüpft ist, deaktiviert.
Um von Servo aus auf Servo ein zu schalten, tippen Sie auf die Servo-Taste links im Hauptmenü unten.