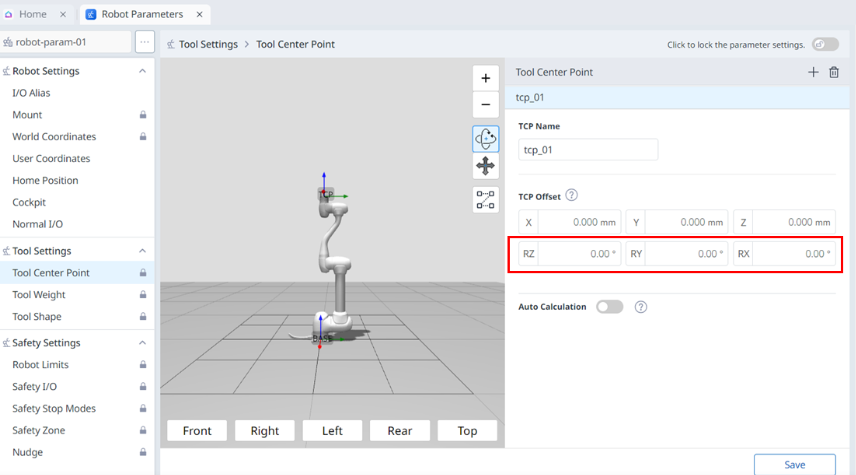
Werkzeugmittelpunkt
Beim Konfigurieren des Werkzeugmittelpunkts (TCP) müssen auch die Position und der Rotationswinkel basierend auf den Flanschkoordinaten definiert werden. ime kann der Abstand vom Standardstartpunkt der Flanschkoordinate zum Werkzeugmittelpunkt (TCP) in der X-, Y- und Z-Richtung nicht größer als 10000 mm sein. Beachten Sie außerdem, dass Kraftsteuerung, Compliance-Kontrolle und direkte Teach-Point-Fixierung nur verfügbar sind, wenn die konvertierten Längen von X, Y und Z ( ![]()
Wenn der Werkzeugmittelpunkt (TCP) mit Auto Calculate (Automatische Berechnung) konfiguriertwurde, wird die Berechnung nur auf der Grundlage der X-, Y- und Z-Positionen vorgenommen. Daher muss der Rotationswinkel eingegeben werden. Der Rotationswinkel kann mit RZ, RY und RX definiert werden und basiert auf der Rotationsmethode „Euler Z-Y-Z“.
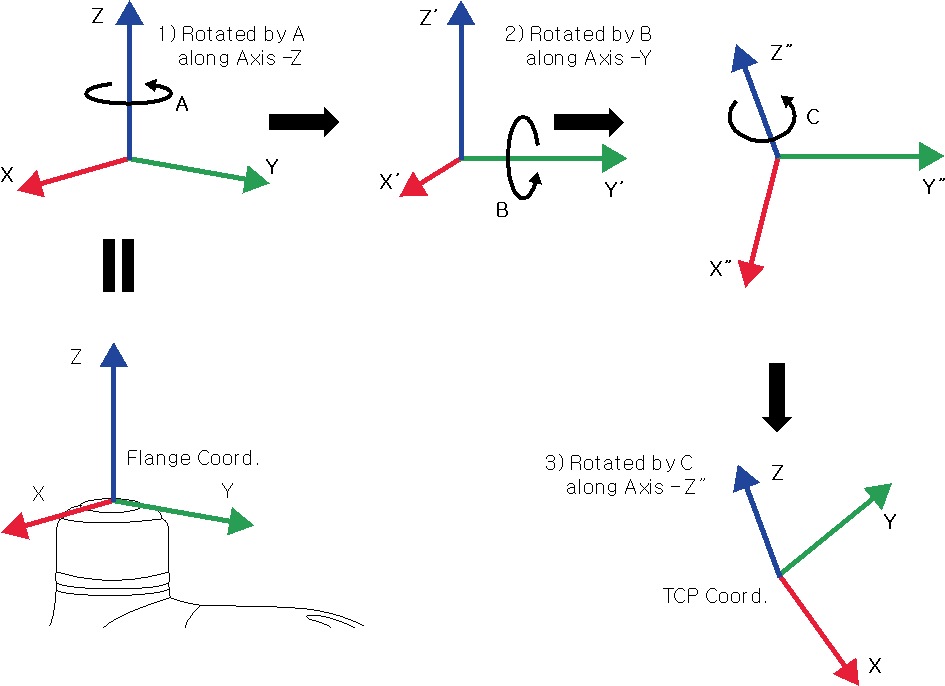
Die Definitionen der Koordinatenachse, ausgedrückt mit x, y, z und der Koordinatenachse, ausgedrückt mit X, Y, Z, lauten wie folgt:
-
Koordinatenachse der ‚Flanschkoordinate‘ (x, y, z): Die Richtung der Koordinatenachse der „Flanschkoordinate“, die am Ende des Flansches definiert ist, ist identisch mit der Roboterkoordinate, wenn der Gelenkwinkel des Roboters (0,0,0,0,0,0) beträgt.
-
Koordinatenachse der ‚TCP-Koordinate‘ (X, Y, Z): Dies wird am Ende oder am Arbeitspunkt des Werkzeugs am Ende des Flansches eingestellt. Zu diesem Zeitpunkt wird der Rotationswinkel der ‚TCP-Koordinate‘ auf der Grundlage der ‚Flanschkoordinate‘ in der Reihenfolge von 1 bis 3) der folgenden Werte definiert:
-
Drehen Sie Um Einen Grad entlang der Z-Achse der Flanschkoordinate.
-
Drehen Sie B-Grad entlang der y-Achse der gemäß 1) gedrehten Koordinate.
-
Drehen Sie C-Grad entlang der z’’-Achse der gemäß 2) gedrehten Koordinate.
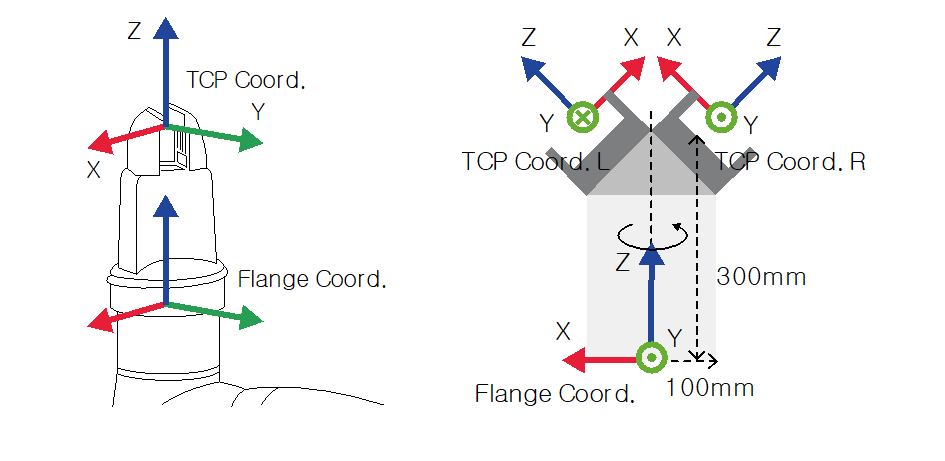
Im Folgenden finden Sie einige Beispiele für die Konfiguration der TCP nach der oben beschriebenen Methode:
-
[X, Y, Z, Rz, Ry, Rx] = [0, 0, 100, 0, 0, 0, 0]: Allgemeiner Greifer mit nur Z-Richtungsversatz (TCP-Koordinate)
-
[X, Y, Z, Rz, Ry, Rx] = [100, 0, 300, 180, -45, 0]: Linker Greifer mit 45-Grad-Winkel (TCP-Koord. L)
-
[X, Y, Z, Rz, Ry, Rx] = [-100, 0, 300, 0, -45, 0]: Rechter Greifer mit 45-Grad-Winkel (TCP-Koord. R)
Unknown Attachment
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
1 |
Umschalttaste sperren |
Dient zum Sperren des eingestellten Werts. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
|
2 |
3D-Simulation |
Hier kann der konfigurierte Werkzeugmittelpunkt simuliert werden. |
|
3 |
Hinzufügen |
Mit dieser Schaltfläche können Sie TCP hinzufügen. |
|
4 |
Löschen |
Mit dieser Schaltfläche können Sie das ausgewählte TCP löschen. |
|
5 |
Speichern |
Mit dieser Schaltfläche können die Einstellwerte gespeichert werden. |
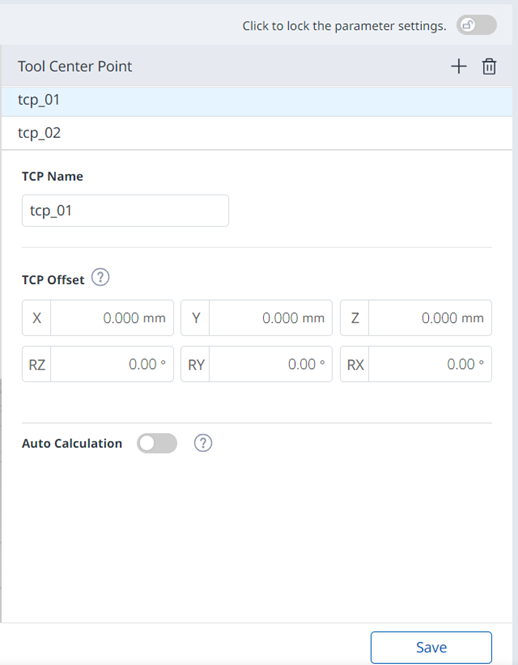
Wenn die Einstellungen gesperrt sind, wird der folgende Bildschirm angezeigt.
Unknown Attachment
Zu diesem Zeitpunkt wird das ausgewählte TCP blau angezeigt, wie unten gezeigt.
Werkzeuggewicht
Sie können das Gewicht des auf dem Flansch montierten Werkzeugs festlegen, indem Sie ein Werkzeuggewicht hinzufügen. Das Werkzeuggewicht kann durch Auswahl von Roboterparameter > Werkzeugeinstellungen > Werkzeuggewicht eingestellt werden.
-
Das Werkzeuggewicht kann mit der automatischen Messfunktion gemessen werden.
-
Es wird empfohlen, das Werkzeuggewicht für jedes Werkzeug mit einem Werkstück hinzuzufügen. Wenn das Gewicht des Werkstücks zu schwer ist, erkennt der Roboter das Gewicht des Werkstücks möglicherweise als externe Kraft. Dies liegt daran, dass der Roboter diese externe Kraft als Kollision feststellt und stoppt.
-
Ändern Sie beim Erstellen einer Aufgabe das Gewicht entsprechend dem Prozess, um das Werkzeuggewicht zu ändern. Es ist beispielsweise möglich, eine Aufgabe so zu konfigurieren, dass das Standardwerkzeuggewicht vor der Aufnahme eines Werkstücks und das Werkzeuggewicht mit dem Werkstück nach der Aufnahme eines Werkstücks ausgewählt wird.
Das aktivierte Werkzeuggewicht kann als Standardgewicht des Werkzeugs eingestellt werden, indem das Symbol Werkzeug einstellen ( ![]()
-
Der Satz der Werkzeugeinstellung ist identisch mit dem Satz anderer Befehle. Der Befehl Set (Festlegen) kann verwendet werden, wenn das Werkzeuggewicht während einer Aufgabe geändert wird. Weitere Informationen finden Sie im Modul Task-Editor .
Hinweis
-
Es können bis zu fünfzig verschiedene Werkzeuggewichte registriert werden.
-
Bei der M-Serie erfolgt die automatische Einstellung der Beschleunigung, wenn das maximale Werkzeuggewicht das maximale Werkzeuggewicht überschreitet.
Unknown Attachment
Unknown Attachment
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
1 |
Umschalttaste sperren |
Dient zum Sperren des eingestellten Werts. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
|
2 |
Hinzufügen |
Mit dieser Schaltfläche können Sie ein neues Werkzeuggewicht hinzufügen. |
|
3 |
Löschen |
Mit dieser Schaltfläche können Sie ein Werkzeuggewicht löschen. |
|
4 |
Liste Der Werkzeuggewichte |
Eine Liste der konfigurierten Werkzeuggewichte. |
|
5 |
Name Des Werkzeuggewichts |
Hier können Sie einen Namen für das Werkzeuggewicht eingeben. |
|
6 |
Bewegung Automatisch Messen |
Mit dieser Schaltfläche können Sie die automatische Messung durchführen. |
|
7 |
Automatische Messung |
Mit dieser Schaltfläche können Sie eine Option auswählen und eine automatische Messung durchführen. |
|
8 |
Bewegungsauswahl |
Sie können die gewünschte Bewegung aus den Optionen auswählen. |
|
9 |
Auswahl der Verwendung von Gewicht |
Sie können wählen, ob Gewicht verwendet werden soll. Dieses Auswahlfeld ist für die E-Serie oder Die A-Serie ohne FPT-Sensoren deaktiviert. |
|
10 |
Gewichtseingabe |
Hier können Sie das gewünschte Gewicht eingeben. |
|
11 |
Auswahl der Verwendung des Schwerpunkts CX |
Die Verwendung des Schwerpunkts CX kann ausgewählt werden. |
|
12 |
CX-Eingang |
CX kann eingegeben werden. |
|
13 |
Auswahl der Verwendung des Schwerpunkts CY |
Die Verwendung des Schwerpunkts CY kann ausgewählt werden. |
|
14 |
CY-Eingabe |
CY kann eingegeben werden. |
|
15 |
Auswahl der Verwendung des Schwerpunkts CZ |
Die Verwendung des Schwerpunkts CZ kann ausgewählt werden. |
|
16 |
CZ-Eingang |
CZ kann eingegeben werden. |
|
17 |
Gibt an, ob Trägheit verwendet werden soll |
Mit diesem Kontrollkästchen können Sie auswählen, ob Trägheit verwendet werden soll. |
|
18 |
lxx-Eingang |
Ein lxx-Eintrag für Trägheit kann eingegeben werden. |
|
19 |
Lyy-Eingabe |
Es kann ein Eintrag für Trägheit eingegeben werden. |
|
20 |
Lzz-Eingabe |
Ein lzz-Eintrag für Trägheit kann eingegeben werden. |
|
21 |
Lxy-Eingabe |
Ein LXY-Eintrag für Trägheit kann eingegeben werden. |
|
22 |
Lyz-Eingang |
Ein LYZ-Eintrag für Trägheit kann eingegeben werden. |
|
23 |
lzx-Eingang |
Ein lzx-Eintrag für Trägheit kann eingegeben werden. |
|
24 |
Speichern |
Mit dieser Schaltfläche können Sie die Einstellwerte speichern. |
Werkzeugform
Die Form des auf dem Flansch montierten Werkzeugs kann durch Hinzufügen einer Werkzeugform festgelegt werden.
Die Werkzeugform kann im Modul Roboterparameter > Werkzeugeinstellungen > Werkzeugform festgelegt werden. Weitere Informationen hierzu enthält der Abschnitt Werkzeugform.
-
Der Roboter bestimmt den Status der Verletzung der Raumbegrenzung basierend auf dem TCP (Werkzeugmittelpunkt) des Roboterendes und des Roboterkörpers. Wenn der eigentliche Roboter eine Werkzeugform hat, die größer ist als die eingestellte TCP, muss eine Werkzeugform hinzugefügt werden, um das Werkstück und das Werkzeug zu schützen.
-
Seien Sie vorsichtig, da sich der Bereich, den der Roboter manövrieren kann, verringert, wenn die Werkzeugform zu groß eingestellt ist.
Die Werkzeugform ist erst verfügbar, nachdem sie registriert (bestätigt) und der Kippschalter aktiviert wurde. Die aktivierte Werkzeugform Element kann durch Drücken des Werkzeugsymbols Set Tool ( ![]()
-
Der Satz der Werkzeugeinstellung ist identisch mit dem Satz anderer Befehle. Der Befehl Set (Festlegen) kann verwendet werden, wenn die Werkzeugform geändert wird, während eine Aufgabe ausgeführt wird. Weitere Informationen finden Sie im Modul Task-Editor.
Hinweis
Es können bis zu fünfzig verschiedene Werkzeugformen registriert werden.
Unknown Attachment
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
1 |
Umschalttaste sperren |
Dient zum Sperren des eingestellten Werts. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
|
2 |
3D-Simulation |
Hier können Sie das Ergebnis der konfigurierten Werkzeugform in 3D simulieren. |
|
3 |
Name Der Werkzeugform |
Der Name des konfigurierten Werkzeugs. |
|
4 |
Werkzeugform |
Die Form des konfigurierten Werkzeugs. |
|
5 |
Werkzeugform Bearbeiten |
Mit dieser Schaltfläche können Sie die konfigurierte Werkzeugform bearbeiten. |
|
6 |
Werkzeugform Wird Gelöscht |
Mit dieser Schaltfläche können Sie die ausgewählte Werkzeugform löschen. |
|
7 |
Werkzeugform Hinzufügen |
Eine Werkzeugform kann hinzugefügt werden. |
|
8 |
Wird Angewendet |
Mit dieser Schaltfläche können Sie die Werkzeugform anwenden, nachdem Sie sie festgelegt haben. |
Unknown Attachment
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
1 |
Werkzeugform |
Dies weist darauf hin, dass es sich bei diesem Fensterbereich um ein Popup-Fenster für Werkzeugform handelt. |
|
2 |
Geben Sie einen Namen ein |
In diesem Feld kann der Name der Werkzeugform eingegeben werden. |
|
3 |
Warnhinweis |
Achtung beim Einrichten |
|
4 |
Neuen Quader Hinzufügen |
Mit dieser Schaltfläche können Sie ein Quader hinzufügen. |
|
5 |
Neue Kugel Hinzufügen |
Mit dieser Schaltfläche können Sie eine Kugel hinzufügen. |
|
6 |
Neue Kapsel Hinzufügen |
Mit dieser Schaltfläche können Sie eine Kapsel hinzufügen. |
|
7 |
Abbrechen |
Mit dieser Taste können Sie die Einstellung abbrechen. |
|
8 |
Bestätigen |
Mit dieser Taste können Sie die Einstellung bestätigen. |
Sobald der Würfel/die Kugel/die Kapsel hinzugefügt wurde, wird die Anzeige wie folgt angezeigt.
|
Unknown Attachment |
Unknown Attachment |
|
Unknown Attachment |
|