Erweitertes Protokoll – Einrichtung von PROFINET IO-Geräten (pnio-Gerät)
Die Robotersteuerungen von Doosan Robotics unterstützen die PROFITNET IO Device (Slave)-Funktion, mit der Daten geändert werden können, nachdem die Parameter des Roboters von einem externen Gerät (PROFINET IO Controller/Master) gelesen wurden. (Z. B. Überwachung von Roboterparametern, Universalregister (Bit, Int, Float) – Verwendung von Universalregister (GPR))
Hinweis) weitere Informationen zu PROFINET finden Sie unter http://www.profibus.com
Erweitertes Protokoll – Einrichtung des Ethernet/IP-Adapters (EIP-Adapter)
Die Robotersteuerungen von Doosan Robotics unterstützen die Ethernet/IP-Adapter-Funktion (Slave), mit der Daten geändert werden können, nachdem die Parameter des Roboters von einem externen Gerät (Ethernet/IP-Scanner/Master) gelesen wurden. (Z. B. Überwachung von Roboterparametern, Universalregister (Bit, Int, Float) – Verwendung von Universalregister (GPR))
Hinweis 1) weitere Informationen zu Ethernet/IP finden Sie unter www.odva.org.
Hinweis 2) die ursprüngliche Standard-IP ist 192.168.137.50. Danach können Sie die Controller-IP abhängig von der Verwendung der SPS-Steueranwendung ändern.
Erweitertes Protokoll Wird Verwendet
Die Funktionen PROFINET IO Device (PNIO-Gerät) und Ethernet/IP Adapter (EIP-Adapter) starten beim Starten des Controllers zusammen und befinden sich im Verbindungszustand Standby mit dem Master-Gerät. Um die Funktion verwenden zu können, ist es daher erforderlich, den Master zu verbinden und einzurichten. Jedes Master-Gerät hat unterschiedliche Eigenschaften, daher müssen sie überprüft werden.
Hinweis
Im Folgenden werden die Implementierungsmerkmale allgemeiner Funktionen für Industrial Ethernet beschrieben.
-
Die Industrial Ethernet-Funktion von Doosan Robotics Controllern verwendet keinen separaten ASIC, sondern implementiert seine Funktion basierend auf TCP/IP, sodass sie keine Echtzeitleistung unterstützt.
-
Die Datenausgabe an externe Geräte hat identische Markierungen (PNIO, EIP), die Dateneingabe an den Roboter hat jedoch nur identische Strukturen und keine Verbindung. Daher wird die Datenausgabe vom PNIO-Controller nicht mit den Ausgabedaten vom EIP-Scanner synchronisiert.
-
Die E/A-Tabelle von PNIO und EIP finden Sie in einem separaten Dokument (oder Anhang).
Ethernet/IP Full GPR Map
Ethernet/IP Full GPR Map ist verfügbar, die verschiedene E/A-Typen im Roboter unterstützt.
-
Bit I/O GPR 24ea
-
Ganzzahlige E/A GPR 50ea
-
Schwimmer-E/A GPR 50ea
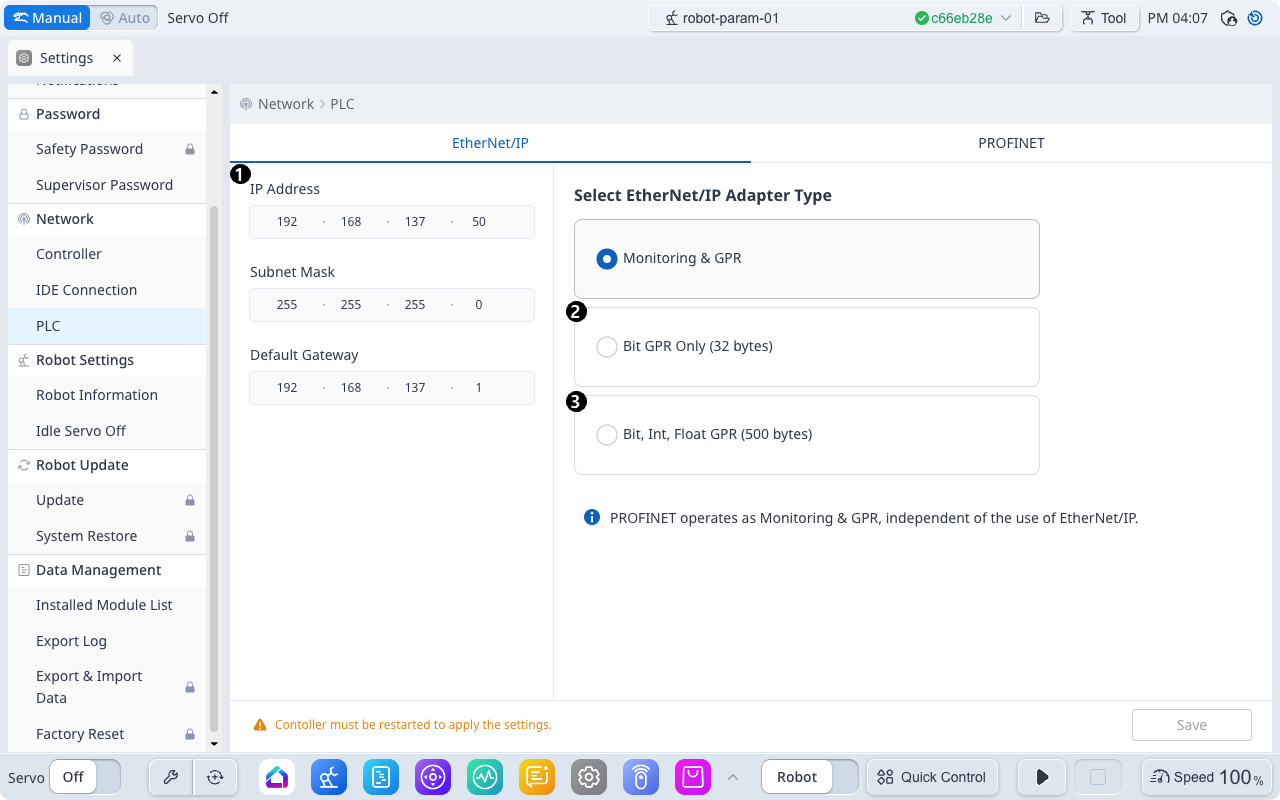
Wählen Sie im linken Menü des Moduls Einstellungen die Option SPS, um zum folgenden Bildschirm zu gelangen. (Siehe Konfigurieren im Abschnitt Netzwerk)
In der Abbildung unten ist Element 3 die vollständige GPR-Karte, und die Einstellung wird erst nach dem Speichern und Neustart gespeichert.
PROFINET-Steckplatz
Für die Netzwerkoptimierung können nur interessierte Slots die Möglichkeit zur Durchführung von Transaktionen verwenden.
-
Steckplatz 1: Roboterstatus (T2O)
-
Steckplatz 2: Roboter-Fehlercode (T2O)
-
Steckplatz 3: Gelenk (T2O)
-
Steckplatz 4: Aufgabe (T2O)
-
Steckplatz Nr. 5: Bit GPR (T2O)
-
Steckplatz 6: INT GPR (T2O)
-
Steckplatz Nr. 7: Schwimmstellung GPR (T2O)
-
Steckplatz Nr. 8: E/A-STEUERUNG (O2T)
-
Steckplatz 9: Bit GPR (O2T)
-
Steckplatz 10: INT GPR (O2T)
-
Steckplatz 11: Schwimmstellung GPR (O2T)
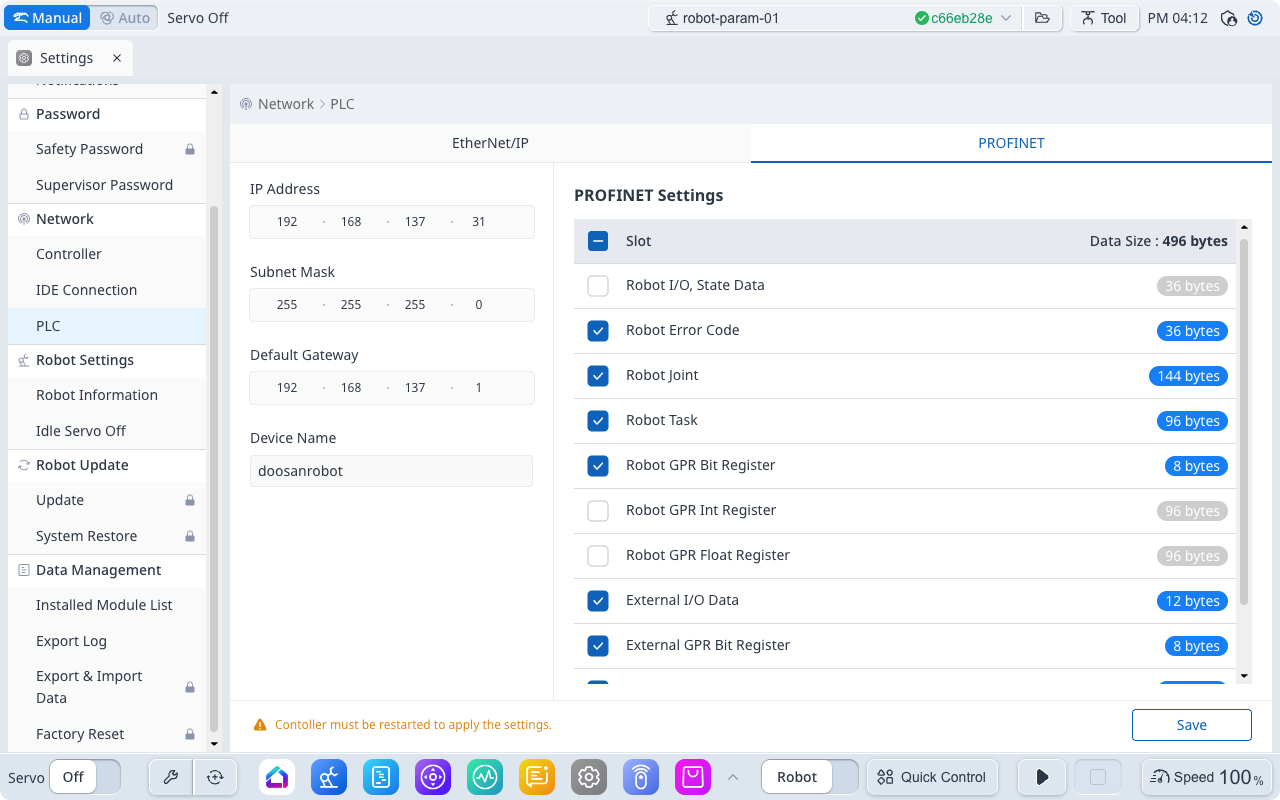
Wählen Sie im linken Menü des Moduls Einstellungen die Option PLC und dann die Registerkarte PROFINET, um den folgenden Bildschirm anzuzeigen. (Siehe Konfigurieren im Abschnitt Netzwerk)
Sie können das Kontrollkästchen in der Mitte verwenden, um nur die Steckplätze auszuwählen, an denen der Benutzer interessiert ist. Die Einstellungen werden erst nach dem Speichern und Neustart gespeichert.
Fehlercodeinformationen Für Roboter
In einer Umgebung ohne TP (HMI) kann der Benutzer die Fehlercodeinformationen des Roboters über SPS überprüfen (Siehe Konfigurieren im Abschnitt Netzwerk)
Ethernet/IP
Hinweis
Ethernet/IP gibt aufgrund der Transaktionsgrenze (500 Byte) bis zu zwei Fehlercodes wieder.
|
Byte-Offset |
Beschreibung |
|---|---|
|
36 |
Haupt- Und Nebenwert (Fehlercode 1)
|
|
40 |
Jahr & Monat & Tag & Stunde (Fehlercode#1)
|
|
44 |
Minute & Sekunde & Millisekunde (Fehlercode 1)
|
|
48 |
Haupt- Und Nebenwert (Fehlercode 2)
|
|
52 |
Jahr & Monat & Tag & Stunde (Fehlercode 2)
|
|
56 |
Minute & Sekunde & Millisekunde (Fehlercode 2)
|
PROFINET: Steckplatz 2
|
Byte-Offset |
Beschreibung |
|---|---|
|
0 |
Haupt- Und Nebenwert (Fehlercode 1)
|
|
4 |
Jahr & Monat & Tag & Stunde (Fehlercode#1)
|
|
8 |
Minute & Sekunde & Millisekunde (Fehlercode 1)
|
|
12 |
Haupt- Und Nebenwert (Fehlercode 2)
|
|
16 |
Jahr & Monat & Tag & Stunde (Fehlercode 2)
|
|
20 |
Minute & Sekunde & Millisekunde (Fehlercode 2)
|
|
24 |
Haupt- Und Nebenwert (Fehlercode 3)
|
|
28 |
Jahr & Monat & Tag & Stunde (Fehlercode#3)
|
|
32 |
Minute & Sekunde & Millisekunde (Fehlercode 3)
|