Einstellung Der Robotergrenzen
In Robotergrenzen können verschiedene Begrenzungen für den Roboter festgelegt werden. Diese Grenzwerte werden verwendet, um sicherzustellen, dass der Roboter innerhalb der festgelegten Grenzwerte sicher arbeitet.
Robotergrenzen können unter Roboterparameter > Sicherheitseinstellungen > Robotergrenzen festgelegt werden.
-
Eine ausführliche Beschreibung der einzelnen Grenzwerte enthält der Abschnitt Robotergrenzen.
Robotergrenzen sind weitgehend in drei Kategorien unterteilt. Jede Kategorie umfasst die folgenden Bildschirme und Funktionen.
Unknown Attachment
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
1 |
Umschalttaste sperren |
Dient zum Sperren des eingestellten Werts. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
|
2 |
TCP/Roboter |
Große Klassifizierung der Robotergrenzen. |
|
3 |
Zurücksetzen |
Wird zum Zurücksetzen der Einstellungen verwendet. |
|
4 |
Kraft |
Wird zum Einstellen der Kraft verwendet. |
|
5 |
Leistung |
Dient zum Einstellen der Leistung. |
|
6 |
Geschwindigkeit |
Dient zum Einstellen der Geschwindigkeit. |
|
7 |
Momentum |
Dient zum Einstellen des Impulses. |
|
8 |
Kollision |
Dient zum Einstellen der Kollision. |
|
9 |
Speichern |
Dient zum Speichern der entsprechenden Einstellung. |
Unknown Attachment
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
1 |
Umschalttaste sperren |
Dient zum Sperren des eingestellten Werts. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
|
2 |
Gelenkgeschwindigkeit |
Große Klassifizierung der Robotergrenzen. |
|
3 |
Zurücksetzen |
Wird zum Zurücksetzen der Einstellungen verwendet. |
|
4 |
J1 |
Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
|
5 |
J2 |
Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
|
6 |
J3 |
Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
|
7 |
J4 (inaktiv bei Modellen der P-Serie) |
Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
|
8 |
J5 |
Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
|
9 |
J6 |
Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
|
10 |
Speichern |
Dient zum Speichern der entsprechenden Einstellung. |
Unknown Attachment
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
1 |
Umschalttaste sperren |
Dient zum Sperren des eingestellten Werts. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
|
2 |
Verbindungswinkel |
Große Klassifizierung der Robotergrenzen. |
|
3 |
Zurücksetzen |
Wird zum Zurücksetzen der Einstellungen verwendet. |
|
4 |
J1 |
Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
|
5 |
J2 |
Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
|
6 |
J3 |
Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
|
7 |
J4 (inaktiv bei Modellen der P-Serie) |
Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
|
8 |
J5 |
Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
|
9 |
J6 |
Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
|
10 |
Speichern |
Dient zum Speichern der entsprechenden Einstellung. |
Sicherheits-E/A
Diese Funktion dient zum ein- und Ausgeben sicherheitsrelevanter Signale an die redundanten Klemmen. Wenn eines der Sicherheitseingangs-/Ausgangssignale ein anderes redundantes Signal aufweist, wird eine Stromkreisunterbrechung oder ein Hardwarefehler festgestellt und der Roboter wird im STO-STOP-Modus gestoppt.
-
Um die Sicherheits-E/A einzustellen, wählen Sie Roboterparameter > Sicherheitseinstellungen > Sicherheits-E/A aus.
Weitere Informationen finden Sie unter E/A für Sicherheitssignale .
Eingabe
Unknown Attachment
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
1 |
Umschalttaste sperren |
Dient zum Sperren des eingestellten Werts. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
|
2 |
Eingang/Ausgang |
Entweder Eingang/Ausgang kann ausgewählt werden, um festgelegt zu werden. |
|
3 |
Signaleinstellung |
Für jeden Port festgelegte Optionen.
Nicht Verwendet Schutzstopp (STO) (L) Not-aus (L) Schutzstopp (L) Reduzierte Geschwindigkeit (L) 3 Pos. Aktivierungsschalter (L zu H und H) Aktivierungsschalter für Handführung (L zu H und H) HGC-Ende und Taskwiederaufnahme (L bis H) Schutzstopp (Auto Reset & Resume) (L) Dynamische Aktivierung der Sicherheitszone (H) Fernbedienungsmodus (H) Not-aus (kein Loopback) (L) Fehler zurücksetzen und fortsetzen (L nach H) Zurücksetzen der Sperre (L nach H) Schutzstopp (SS1) (L) Schutzstopp (SS2) (L) Dynamische Aktivierung der Sicherheitszone (L) |
|
4 |
Je nach Roboterstatus wählen, ob das Signal ignoriert werden soll |
Wenn Sie das Signal „Protective Stop“ auswählen, können Sie festlegen, ob das ausgewählte Signal im roboterstatus „MANUELL, WIEDERHERSTELLUNG, HGC“ ignoriert werden soll. |
|
5 |
Verzögerungsrate einstellen |
Sie können die Verzögerungsrate einstellen. Er kann zwischen 0 und 100 liegen. |
|
6 |
Speichern |
Mit dieser Schaltfläche können Sie die eingegebene Einstellung speichern. |
Ausgabe
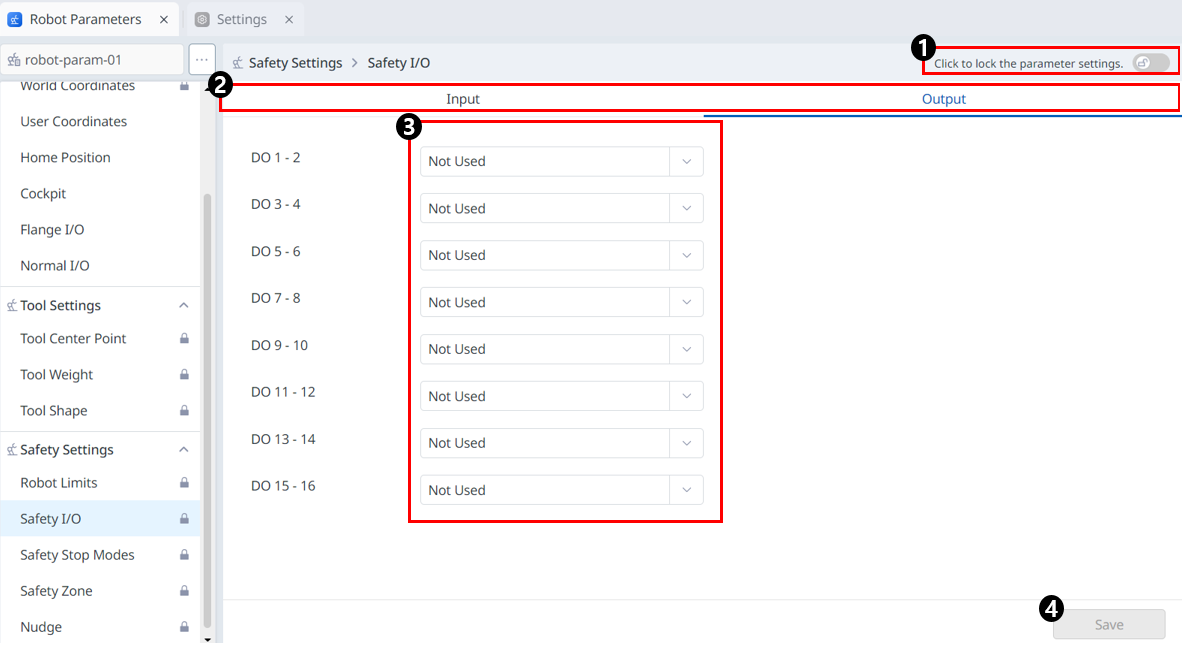
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
1 |
Umschalttaste sperren |
Dient zum Sperren des eingestellten Werts. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
|
2 |
Eingang/Ausgang |
Entweder Eingang/Ausgang kann ausgewählt werden, um festgelegt zu werden. |
|
3 |
Signaleinstellung |
Für jeden Port festgelegte Optionen.
Nicht Verwendet Safe Torque Off (STO) (L) Sicherer Betriebsstopp (SOS) (L) Status normale Geschwindigkeit (L) Status reduzierte Geschwindigkeit (L) Auto-Modus (L) Manueller Modus (L) Eigenständige Zone (L) Teamarbeitsbereich (L) Zone mit hoher Priorität (L) Begrenzter Bereich für die Werkzeugausrichtung (L) Not-aus (L) Not-aus (ohne Loopback-Eingang) (L) Ausgewiesene Zone (L) Fernmodus (L) Interlock Reset erforderlich (L) Status Handführung (L) |
|
4 |
Speichern |
Mit dieser Schaltfläche können Sie die eingegebene Einstellung speichern. |
Einstellungen Für Sicherheitsstopp-Modi
Lernen Sie die Arten von Sicherheitsanschlägen und das ein- und Ausschalten von Sicherheitsanschlägen kennen.
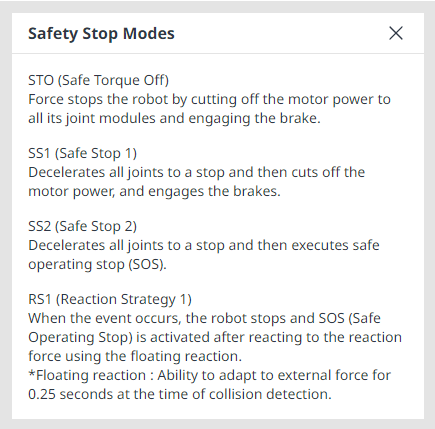
Arten von Sicherheitsanschlägen
Folgende Stoppmodi sind verfügbar, um die Sicherheit des Benutzers zu gewährleisten:
-
STO (Safe Torque Off): Stoppt Servo Off (Motorstrom wird sofort abgeschaltet)
-
SS1 (sicherer Stopp 1): Servo aus nach Stopp der maximalen Verzögerung
-
SS2 (sicherer Stopp 2): Standby nach maximaler Verzögerung Stopp (Pause)
-
RS1: Bei Kollision hält sich an die entgegengesetzte Richtung der Kollision und wechselt dann in den Standby-Modus (kann nur in Kollisionserkennung/TCP-Kraftüberschreitung eingestellt werden)
Roboter von Doosan Robotics verfügen über zwei Arten von Sicherheitsstopp-Funktionen. Not-aus wird für allgemeine Notsituationen verwendet, und der Roboter kann den Betrieb mit eingeschaltetem Servo wieder aufnehmen, nachdem er den Not-aus losgelassen hat. Im Falle eines Schutzstopps kann der Roboter den Betrieb wieder aufnehmen, indem er die Ursache des Schutzstopps beseitigt und den Stopp loslässt.
-
Not-Aus: Er stellt den Stopp-Modus ein, wenn der Not-aus-Taster des Programmierhandgeräts oder ein zusätzlich installiertes externes Gerät aktiviert wird
-
Sie wird aktiviert, wenn der Not-aus-Schalter des Programmierhandgeräts oder des mit dem TBSFT EM-Terminal verbundenen Schalters gedrückt wird.
-
Nur STO oder SS1 kann ausgewählt werden.
-
-
Schutzstopp: Sie stellt den Stopp-Modus ein, wenn die extern angeschlossene Schutzausrüstung aktiviert wird
-
Sie wird aktiviert, wenn die an das TBSFT PR-Terminal angeschlossene Schutzausrüstung aktiviert wird.
-
Weitere Informationen zu den Sicherheitsstopp-Funktionen finden Sie unter Sicherheitsfunktionen.
Ein-/Ausschalten des Sicherheitsstopps
Drücken Sie die Not-aus-Taste am Programmierhandgerät, oder aktivieren Sie die Sicherheitsvorrichtung, die an die Sicherheits-E/A angeschlossen ist, um den Not-aus zu aktivieren. Sicherheitsvorrichtungen können über Roboterparameter > Sicherheitseinstellungen > Sicherheits-E/A- Funktionen des Bildschirms Programmierhandgerät an einen Not-aus- oder Schutzstopp angeschlossen werden.
-
Weitere Informationen zum Anschließen eines Sicherheitsgeräts an Sicherheits-E/A finden Sie unter Verbinden von Controller-E/A.
-
Informationen zum Einstellen der Sicherheitsstopp-Funktion für diesen Anschluss im Programm finden Sie unter E/A-Sicherheitssignal.
Unknown Attachment
Menü
|
Artikel |
Beschreibung |
|
|---|---|---|
|
1 |
Umschalttaste sperren |
Dient zum Sperren des eingestellten Werts. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
|
2 |
Informationsmeldung |
Eine Meldung mit Informationen, die für die Einstellung erforderlich sind. |
|
3 |
Zurücksetzen |
Eine Taste zum Zurücksetzen der Einstellungen. |
|
4 |
Not-Aus |
Es kann ein Sicherheitsstopp ausgewählt werden, der für das entsprechende Element verwendet werden kann. Die Dropdown-Menüs umfassen: STO SS1 |
|
5 |
Schutzstopp |
Es kann ein Sicherheitsstopp ausgewählt werden, der für das entsprechende Element verwendet werden kann. Die Dropdown-Menüs umfassen: SS1 SS2 |
|
6 |
Verletzung Der Begrenzung Des Verbindungswinkels |
Es kann ein Sicherheitsstopp ausgewählt werden, der für das entsprechende Element verwendet werden kann. Die Dropdown-Menüs umfassen: STO SS1 SS2 |
|
7 |
Gelenk-Geschwindigkeitsbegrenzung Verletzt |
Es kann ein Sicherheitsstopp ausgewählt werden, der für das entsprechende Element verwendet werden kann. Die Dropdown-Menüs umfassen: STO (außer Serie H/P) SS1 SS2 |
|
8 |
Überschreitung Der Drehmomentgrenze Für Das Gelenk |
Nur STO ist verfügbar. |
|
9 |
Kollisionserkennung |
Es kann ein Sicherheitsstopp ausgewählt werden, der für das entsprechende Element verwendet werden kann. Die Dropdown-Menüs umfassen: STO (außer Serie H/P) SS1 SS2 RS1 |
|
10 |
Verletzung der Positionsbegrenzung des TCP-Roboters |
Es kann ein Sicherheitsstopp ausgewählt werden, der für das entsprechende Element verwendet werden kann. Die Dropdown-Menüs umfassen: STO SS1 SS2 |
|
11 |
Verletzung der TCP-Ausrichtungsgrenze |
Es kann ein Sicherheitsstopp ausgewählt werden, der für das entsprechende Element verwendet werden kann. Die Dropdown-Menüs umfassen: STO (außer Serie H/P) SS1 SS2 |
|
12 |
Verletzung des TCP-Geschwindigkeitslimits |
Es kann ein Sicherheitsstopp ausgewählt werden, der für das entsprechende Element verwendet werden kann. Das Dropdown-Menü enthält Folgendes: STO (außer Serie H/P) SS1 SS2 |
|
13 |
TCP Force Limit Verletzung |
Es kann ein Sicherheitsstopp ausgewählt werden, der für das entsprechende Element verwendet werden kann. Die Dropdown-Menüs umfassen: STO (außer Serie H/P) SS1 SS2 |
|
14 |
Verletzung Der Impulsgrenze |
Es kann ein Sicherheitsstopp ausgewählt werden, der für das entsprechende Element verwendet werden kann. Die Dropdown-Menüs umfassen: STO (außer Serie H/P) SS1 SS2 |
|
15 |
Mechanische Grenzüberschreitung |
Es kann ein Sicherheitsstopp ausgewählt werden, der für das entsprechende Element verwendet werden kann. Die Dropdown-Menüs umfassen: STO (außer Serie H/P) SS1 SS2 |
|
16 |
Speichern |
Mit dieser Schaltfläche können Sie die Einstellwerte speichern. |
Hinweis
Das folgende Popup-Fenster wird in der Informationsmeldung angezeigt:
Hinweis
Ab Version 3,2 wurden einige STO-Einstellungen in den Safety-Stop-Modi des H-Modells in SS1 geändert.
Wenn die verwendeten Werte aktualisiert wurden, wird das folgende Popup-Fenster angezeigt.