A tampa do flange da extremidade do robô tem dois conectores M8 de 8 pinos e consulte a figura abaixo para obter a localização e o formato.
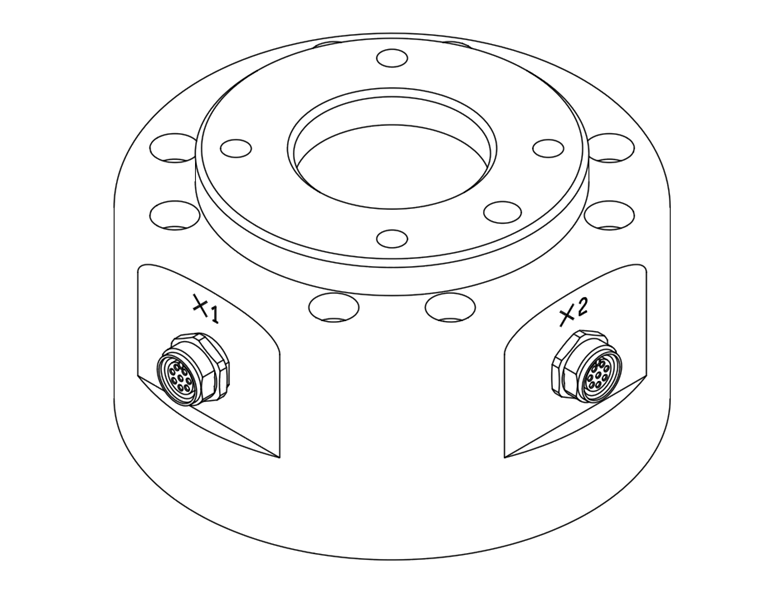
O conector fornece os sinais de energia e controle necessários para operar a garra ou os sensores incorporados em ferramentas robóticas específicas. A seguir estão exemplos de cabos industriais (cabos equivalentes podem ser usados):
-
Phoenix CONTACT 1404178, macho (reto)
-
Phoenix CONTACT 1404182, macho (ângulo reto)
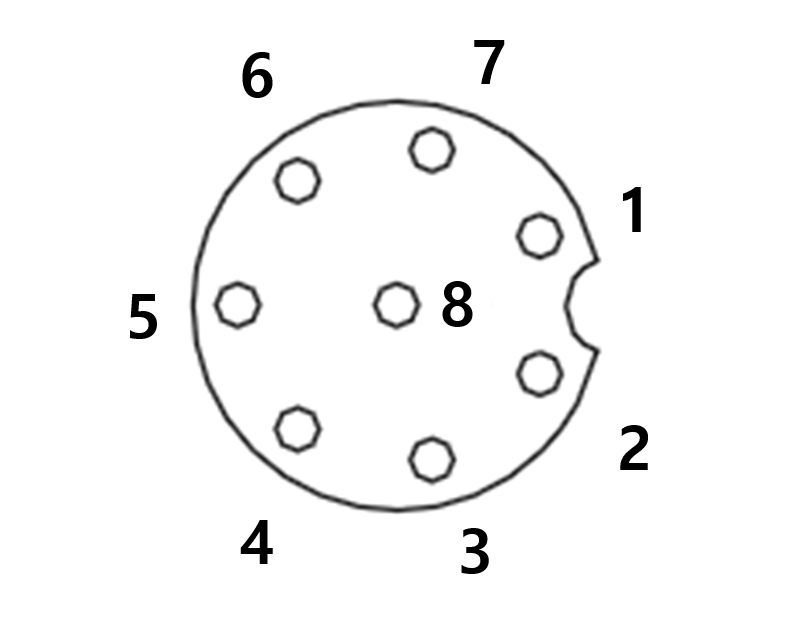
Diagrama esquemático
O mapa de pinos de cada conector é o seguinte:
As funções de E/S fornecidas pelos conectores X1 e X2 são diferentes entre si e consulte a tabela abaixo para obter configurações detalhadas de E/S.
Configuração X1
|
Não |
Tipo de sinal |
Descrição |
|---|---|---|
|
1 |
Entrada digital 1 |
PNP (Tipo de origem, padrão) |
|
2 |
Saída digital 1 |
Defina como PNP (Tipo de origem, padrão) ou NPN (Tipo de coletor) |
|
3 |
Saída digital 2 |
Defina como PNP (Tipo de origem, padrão) ou NPN (Tipo de coletor) |
|
4 |
Entrada analógica 1 / RS-485 ou superior |
Defina como Tensão (0 V) ou Corrente (4 mA, padrão) / |
|
5 |
Potência |
Defina a fonte de alimentação interna como 24V (padrão), 12V ou 0V |
|
6 |
Entrada analógica 2 / RS-485 - |
Defina como Tensão (0 V) ou Corrente (4 mA, padrão) / |
|
7 |
Entrada digital 2 |
PNP (Tipo de origem, padrão) |
|
8 |
TERRA |
|
Configuração X2
|
Não |
Tipo de sinal |
Descrição |
|---|---|---|
|
1 |
Entrada digital 3 |
PNP (Tipo de origem, padrão) |
|
2 |
Saída digital 3 |
Defina como PNP (Tipo de origem, padrão) ou NPN (Tipo de coletor) |
|
3 |
Saída digital 4 |
Defina como PNP (Tipo de origem, padrão) ou NPN (Tipo de coletor) |
|
4 |
Entrada analógica 3 / RS-485 ou superior |
Defina como Voltage (Tensão) (0 V) ou Current (Corrente) (4 mA, padrão) / Max 1M baud rate (Taxa de transmissão máxima de 1M) |
|
5 |
Potência |
Defina a fonte de alimentação interna como 24V (padrão), 12V ou 0V |
|
6 |
Entrada analógica 4 / RS-485 - |
Defina como Voltage (Tensão) (0 V) ou Current (Corrente) (4 mA, padrão) / Max 1M baud rate (Taxa de transmissão máxima de 1M) |
|
7 |
Entrada digital 4 |
PNP (Tipo de origem, padrão) |
|
8 |
TERRA |
|
A potência inicial de entrada/saída (E/S) do flange é definida como 24 V e pode ser definida como 0 V ou 12 V.
Consulte a tabela abaixo para obter especificações detalhadas de energia durante a conexão de E/S.
|
Parâmetro |
Mín |
Tipo |
Máx |
Unidade |
|---|---|---|---|---|
|
Tensão de alimentação (modo 12V) |
11,4 |
12 |
12,6 |
V |
|
Tensão de alimentação (modo 24V) |
22,8 |
24 |
25,2 |
V |
|
Corrente de alimentação |
- |
- |
3 |
A |
Aviso
-
Configure a ferramenta e a garra para que não causem nenhum perigo quando pt causarem algum perigo quando a energia for cortada.
(por exemplo, peça caindo da ferramenta) -
O terminal no 5 de cada conector emite 24 V em todos os momentos enquanto a energia é fornecida ao robô, portanto, certifique-se de cortar a fonte de alimentação para o robô ao configurar a ferramenta e a garra.
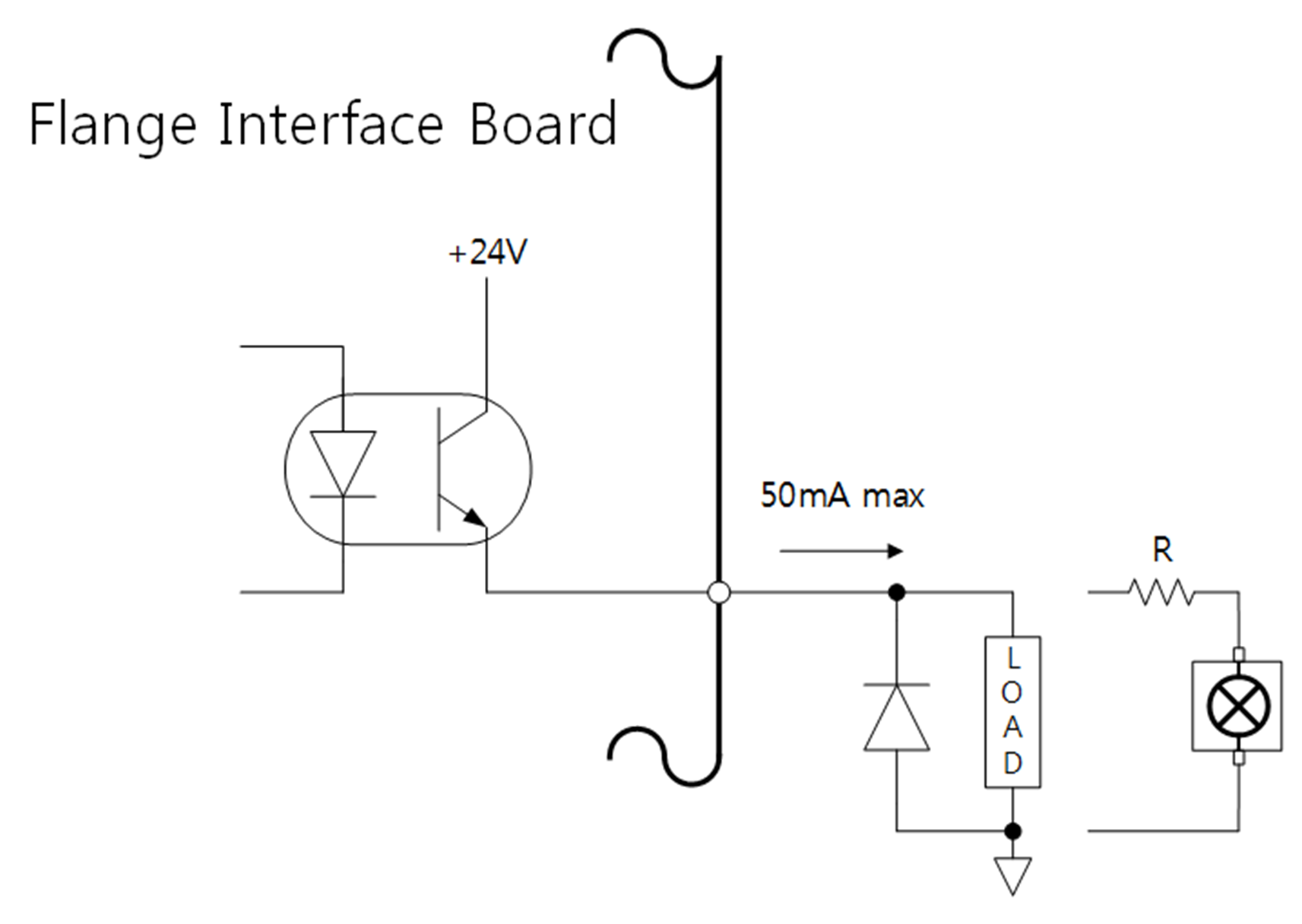
Especificações de saída digital do flange
A saída digital do flange é uma especificação PNP, e a saída do acoplador de foto é configurada na saída.
O canal de saída correspondente torna-se 24V quando a saída digital é ativada. Quando a saída digital está desativada, o estado do canal de saída correspondente é aberto (flutuante).
As especificações elétricas da saída digital são as seguintes:
|
Parâmetro |
Mín |
Tipo |
Máx |
Unidade |
|---|---|---|---|---|
|
Tensão ao dirigir 10mA |
23 |
- |
- |
V |
|
Tensão ao dirigir 50mA |
22,8 |
- |
23,7 |
V |
|
Corrente ao dirigir |
0 |
- |
50 |
MA |
A configuração foi alterada da seguinte forma desde 11 de abril de 2024
As saídas de Digitas Ou apoiam dois modos different:
|
Modo |
Ativo |
Inativo |
|---|---|---|
|
PNP (Tipo de origem, padrão) |
Alto |
Abra |
|
NPN (Tipo de coletor) |
Baixo |
Abra |
A potência inicial de entrada/saída (E/S) do flange é definida como 24 V e pode ser definida como 0 V ou 12 V.
O canal de saída correspondente torna-se 12V ou 24V quando a saída digital é ativada.
Quando a saída digital está desativada, o estado do canal de saída correspondente é aberto (flutuante).
As especificações elétricas da saída digital são as seguintes:
|
Parâmetro |
Mín |
Tipo |
Máx |
Unidade |
|---|---|---|---|---|
|
Tensão ao dirigir no modo 12V |
11,4 |
12 |
12,6 |
V |
|
Tensão ao dirigir o modo 24V |
22,8 |
24 |
25,2 |
V |
|
Corrente ao dirigir |
0 |
- |
50 |
MA |
Cuidado
-
A saída digital não está sujeita à limitação de corrente. Ignorar as especificações apresentadas acima durante a operação pode causar danos permanentes ao produto.
-
A figura abaixo é um exemplo de configuração de saída digital, portanto, consulte-a ao conectar a ferramenta e a garra.
-
Certifique-se de desconectar a energia do robô ao configurar o circuito.
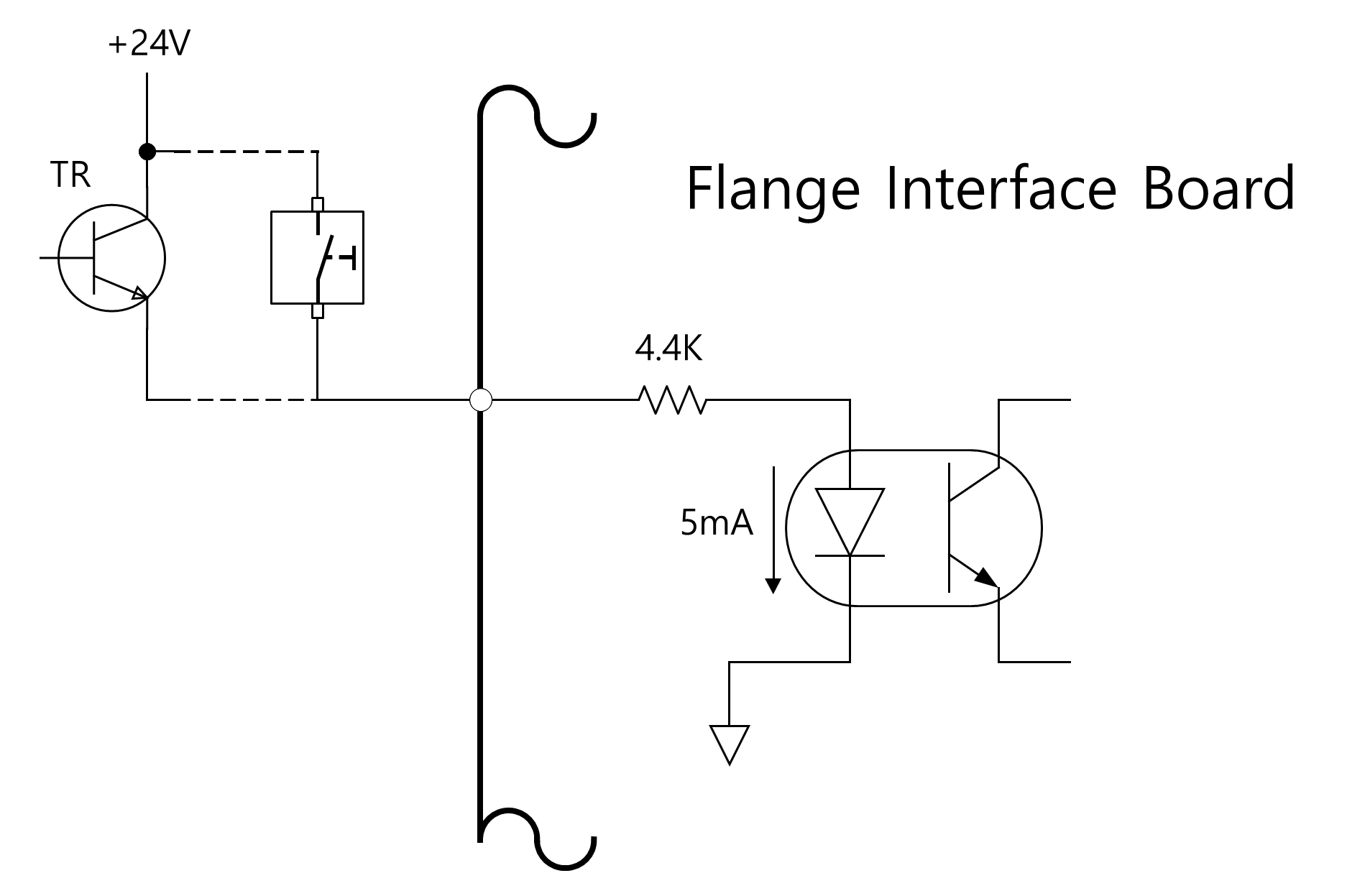
Especificações de entrada digital do flange
A entrada digital do flange apresenta uma entrada de acoplador de foto.
A corrente baseada na entrada 24V é limitada a 5mA pela resistência interna.
As especificações elétricas da entrada digital são as seguintes:
|
Parâmetro |
Mín |
Tipo |
Máx |
Unidade |
|---|---|---|---|---|
|
Tensão de entrada |
0 |
- |
26 |
V |
|
Lógica alta |
4,4 |
- |
- |
V |
|
Baixo lógico |
0 |
- |
0,7 |
V |
|
Resistência de entrada |
- |
4,4 mil |
- |
Ω |
Cuidado
-
A figura abaixo é um exemplo de uma configuração de entrada digital, portanto, consulte-a ao conectar um dispositivo de entrada.
-
Certifique-se de desconectar a energia do robô ao configurar o circuito.
Especificações de entrada analógica do flange
Recebe sinais de tensão ou corrente de dispositivos externos.
A entrada analógica pode ser definida para tensão (0-10V) ou corrente (4-20mA).
As especificações elétricas são mostradas abaixo.
|
Parâmetro |
Mín |
Tipo |
Máx |
Unidade |
|---|---|---|---|---|
|
Tensão de entrada no modo de tensão |
0 |
- |
10 |
V |
|
Corrente de entrada no modo atual |
4 |
- |
20 |
MA |
|
Resolução |
- |
12 |
- |
bit |